用于量子计算应用的双色激光器
文献发布时间:2023-06-19 11:14:36
技术领域
各种实施方案涉及一种双色激光系统。各种实施方案涉及一种具有相位控制特征的双色激光系统。
背景技术
在各种原子系统中,重要的是能够以特定频率和/或以与原子系统具有特定频率间隔和/或相位关系的激光束组向系统递送激光束。例如,捕获离子量子计算使用激光束来完成捕获离子量子计算机内的各种功能。例如,可使用激光束来实现量子计算机的逻辑门。此类应用需要在位置、频率和相位方面将激光精确和准确地递送到离子阱。
发明内容
示例性实施方案提供了双色激光系统、对应的伺服系统以及对应的方法。在各种实施方案中,双色激光系统和/或对应的伺服系统用于在量子计算机中执行量子逻辑门。
根据一个方面,提供了一种多频率激光系统。在示例性实施方案中,多频率激光系统包括主振荡器和臂分束器,该主振荡器被配置为生成主要光束(master beam),该臂分束器被配置为将主要光束分离成第一光束和第二光束。将第一光束提供到主模式臂以用于生成主模式光束(primary mode beam),并且将第二光束提供到边带模式臂以用于生成边带模式光束(sideband mode beam)。多激光频率系统还包括边带光束臂,该边带光束臂包括调制器,该调制器被配置为调制第二光束以生成包括边带的光束;滤波器,该滤波器被配置为从包括边带的光束中选择特定的边带模式以生成选定边带光束;放大器腔,该放大器腔被配置为放大特定的边带模式并抑制所述选定边带模式的其它剩余模式;和声光调制器,该声光调制器被配置为使经放大的选定边带光束的每种模式的频率移位,以生成边带模式光束。以协调方式向一个或多个原子对象提供主模式光束和边带模式光束以实施量子门。
在示例性实施方案中,滤波器是校准器。在示例性实施方案中,通过控温烘箱将校准器保持在恒定温度下。在示例性实施方案中,主模式臂和边带模式臂各自包括一组非线性光学元件。在示例性实施方案中,该组非线性光学元件包括二次谐波生成腔。在示例性实施方案中,当作为非同传光束提供主模式光束和边带模式光束时,经由启动双通声光调制器将主模式光束和边带模式光束锁相到本地振荡器。在示例性实施方案中,双通声光调制器位于该组非线性光学元件上游的主模式臂的光学路径和边带模式臂的光学路径中。在示例性实施方案中,在该组非线性光学元件的下游测量主模式光束和边带模式光束的频率之间的相对差。在示例性实施方案中,该系统还包括声光调制器,该声光调制器位于主模式臂的一组非线性光学元件以及边带模式臂的一组非线性光学元件的上游,该声光调制器被配置为基于对相对差的测量来锁相主模式光束和边带模式光束。在示例性实施方案中,基于为包括多频率激光系统的量子计算机定义的量子位空间的两种状态之间的能量差来确定主模式光束和边带模式光束之间的相对能量差。在示例性实施方案中,当主模式光束和边带模式光束是同传光束时,使用射频振荡器来稳定主模式光束和边带模式光束之间的相对相位差。在示例性实施方案中,该系统还包括伺服系统,该伺服系统被配置为稳定主模式光束和边带模式光束之间的相对相位差和/或相对频率差。在示例性实施方案中,伺服系统接收至少一个本地振荡器信号和直接数字频率合成器(DDS)信号作为输入。在示例性实施方案中,DDS信号作为伺服系统的输入臂的一部分提供,并且提供到伺服系统的输出臂。在示例性实施方案中,经由延迟线将DDS信号提供到伺服系统的输出臂。在示例性实施方案中,将DDS信号施加到伺服系统的输出臂实现主模式光束和边带模式光束中的至少一者的不连续相位变化。
根据一个方面,提供了耦接到多频率激光系统的伺服系统。在示例性实施方案中,伺服系统被配置为稳定由多频率激光系统生成的主模式光束和边带模式光束之间的相对相位差和/或相对频率差。在示例性实施方案中,伺服系统包括被配置为向伺服机构提供输入信号的输入臂,该输入臂被配置为接收本地振荡器信号和直接数字频率合成器(DDS)信号作为输入;和输出臂,该输出臂被配置为接收来自伺服机构的输出信号和DDS信号。
在示例性实施方案中,经由延迟线将DDS信号提供到伺服系统的输出臂,该延迟线被配置为针对DDS信号的变化而对时间延迟进行补偿以传播通过伺服系统。在示例性实施方案中,将DDS信号施加到伺服系统的输出臂实现主模式光束和边带模式光束中的至少一者的不连续相位变化。在示例性实施方案中,输入臂还接收与主模式光束和边带模式光束之间的相对频率差相对应的拍频信号。
附图说明
因此,已经概括地描述了本发明,现在将参考附图,这些附图未必按比例绘制,并且其中:
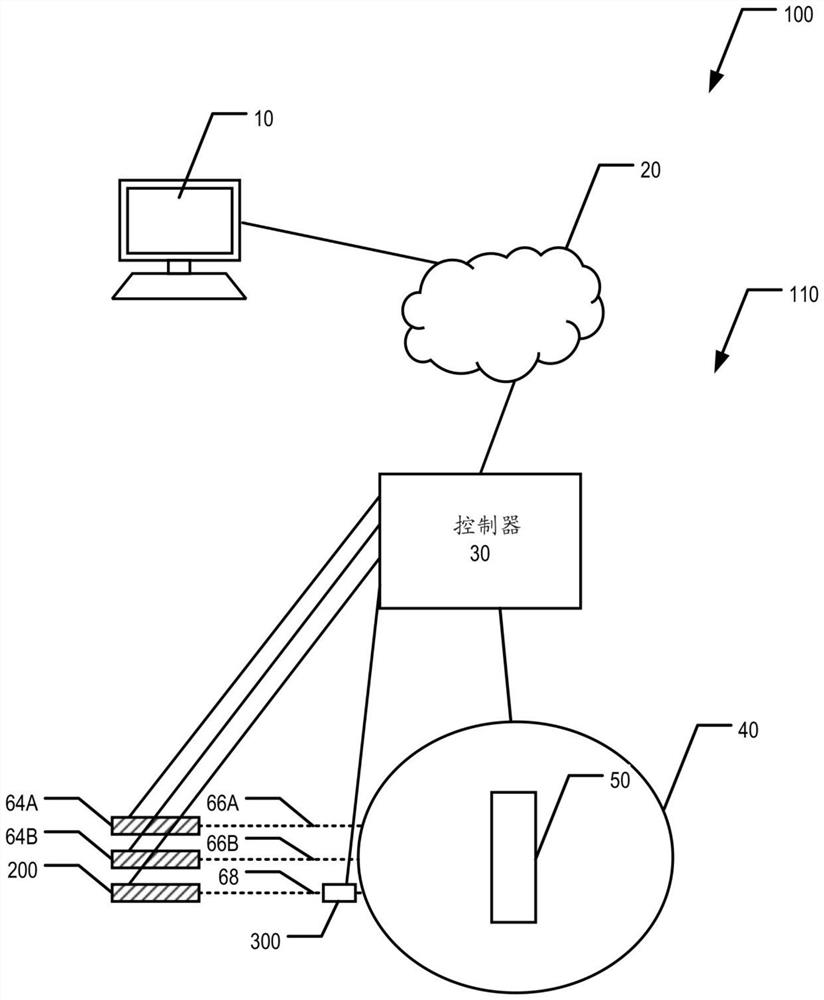
图1提供了根据示例性实施方案的示例性捕获原子对象量子计算机系统的示意图。
图2提供了根据示例性实施方案的示例性双色激光系统的框图。
图3A提供了根据示例性实施方案的示例性伺服系统的框图。
图3B提供了根据示例性实施方案的示例性双通声光调制器(AOM)的示意图。
图4提供了根据示例性实施方案的可使用的示例性控制器的示意图。
图5提供了根据示例性实施方案的可使用的示例性计算实体的示意图。
具体实施方式
现在将在下文中参考附图更全面地描述本发明,在附图中示出了本发明的一些但不是全部的实施方案。实际上,本发明可以以许多不同的形式体现,并且不应该被解释为限于本文阐述的实施方案;相反,提供这些实施方案是为了使本公开满足适用的法律要求。除非另外指明,否则术语“或”(也表示为“/”)在本文中以另选的意义和结合的意义两者来使用。术语“例示性”和“示例性”是用于没有质量水平指示的示例。除非另外指明,否则术语“大致”和“大约”是指在工程和/或制造极限内和/或在用户测量能力内。在全篇内容中,类似的标号指代类似的元件。
如上所述,在各种原子系统中,重要的是能够在位置、频率和/或相位方面精确和准确地将一个或多个激光束递送到原子系统。例如,在诸如原子时钟、Bose-Einstein冷凝物系统、捕获离子系统和/或其它原子系统的原子系统中,精确和准确的激光束递送对于系统的各种使用、操纵系统等是重要的。现在将更详细地描述对应于捕获原子对象(例如,离子)量子计算机系统的各种示例性实施方案。
图1提供了根据示例性实施方案的示例性捕获原子对象量子计算机系统100的示意图。在各种实施方案中,量子计算机系统100包括计算实体10和量子计算机110。在各种实施方案中,量子计算机110的控制器30可经由一个或多个有线和/或无线网络20与计算实体10通信。在各种实施方案中,量子计算机110包括控制器30、包封捕集器50的低温和/或真空室40、一个或多个操纵源64(例如,64A、64B)、一个或多个双色激光系统200、一个或多个伺服系统300等。在各种实施方案中,捕集器50被配置成在其中捕集一个或多个原子对象,并且操纵源64被配置成经由光学路径66(例如,66A、66B)向捕集器50的一个或多个部分提供操纵信号。在各种实施方案中,操纵信号可用于将一个或多个原子对象初始化到量子位空间中,执行冷却操作,执行测量操作等。在各种实施方案中,双色激光系统200被配置为向捕集器50的一个或多个部分提供一个或多个门信号以实施一个或多个量子门(例如,量子逻辑门)。在各种实施方案中,量子门可以是一个量子位门、两个量子位门等。在各种实施方案中,一个或多个门信号可经由一个或多个光学路径68提供到捕集器50的一个或多个部分。在各种实施方案中,光学路径68包括伺服系统300。在各种实施方案中,被捕集在捕集器50内的原子对象是离子、原子等。例如,在示例性实施方案中,原子对象为镱离子。在示例性实施方案中,原子对象包括量子位离子以及对应的冷却离子。
在各种实施方案中,计算实体10被配置为允许用户向量子计算机系统100提供输入(例如,经由计算实体10的用户界面提供)并且对来自量子计算机系统100的输出进行接收、查看等。计算实体10可经由一个或多个有线或无线网络20与控制器30通信。例如,计算实体10可被配置为向控制器30提供量子电路以供量子计算机110执行,并且控制器30可向计算实体10提供执行一个或多个量子电路的结果。
在各种实施方案中,控制器30被配置为控制捕集器50、控制低温和/或真空室40内的温度和压力的冷却和/或真空系统(未示出)、操纵源64、双色激光系统200、伺服系统300和/或量子计算机110的其它部件(例如,被配置用于“读取”量子计算机的输出的光学收集系统)。在各种实施方案中,控制器30被配置为根据由计算实体10提供和/或由控制器30生成的可执行指令、命令集等来控制量子计算机110的各种部件。在各种实施方案中,控制器30被配置为从量子计算机110(例如,从光学收集系统)接收输出,并且向计算实体10提供该输出和/或处理该输出的结果。
在各种实施方案中,双色激光系统200向捕集器50的一个或多个部分提供一个或多个门信号,该捕集器中捕获有原子对象,用作量子计算机110的量子位。由双色激光系统200提供的门信号包括主模式光束和边带模式光束。主模式光束和边带模式光束具有相对频率差Δ>0。在示例性实施方案中,相对频率差Δ约等于量子位空间中两种状态之间的频率差。例如,如果量子位空间是基于原子对象的能级的超细分裂来限定的,则相对频率差Δ可以是大约100MHz至100GHz。在示例性实施方案中,相对频率差Δ是大约12GHz至13GHz。
图2提供了根据示例性实施方案的双色激光系统200的框图。在各种实施方案中,双色激光系统200包括主振荡器202。在各种实施方案中,主振荡器202是激光器。在各种实施方案中,主振荡器202是耦接到谐振腔和/或其它激光振荡器的激光器。在示例性实施方案中,主振荡器202是耦接到锥形放大器的二极管激光器。在示例性实施方案中,主振荡器202是低相位噪声激光器。在示例性实施方案中,主振荡器202被配置为生成主要光束。在示例性实施方案中,主要光束是具有特征波长的激光束,该特征波长大约是由双色激光系统200提供的门信号的主模式光束的特征波长的两倍。例如,在示例性实施方案中,主振荡器202的特征波长为740nm,并且门信号的主模式光束的特征波长为370nm。
在各种实施方案中,主振荡器202光学耦合到臂分束器204。在各种实施方案中,由主振荡器202生成的主要光束被提供到臂分束器204(例如,经由光纤、波导、自由空间光学路径等提供)。例如,臂分束器204可被配置为将主要光束分离成可由主模式臂210和边带模式臂220调节的两个或更多个光束,以分别生成和/或提供主模式光束和边带模式光束。例如,臂分束器204可被配置为将由主振荡器202提供的主要光束分离成两个或更多个光束。在示例性实施方案中,臂分束器204是1×2分束器,并且被配置为将由主振荡器202提供的主要光束分离成两个光束。在示例性实施方案中,臂分束器204被配置为将由主振荡器202提供的主要光束分离成强度大致相同的两个光束。例如,臂分束器204可将由主振荡器202提供的主要光束分离成提供到双色激光系统200的主模式臂210的第一光束以及提供到双色激光系统200的边带模式臂220的第二光束。
在示例性实施方案中,第一光束从臂分束器204传输至功率放大器216。例如,第一光束可经由光纤、波导、自由空间光学路径等从臂分束器204传输至功率放大器216。在各种实施方案中,功率放大器216被配置为放大和/或增加第一光束的强度。在示例性实施方案中,功率放大器216被配置为放大和/或增加第一光束的主模式的强度。经放大的第一光束然后可从功率放大器216传输到分束器214。例如,经放大的第一光束可经由光纤、波导、自由空间光学路径等从功率放大器216传输到分束器214。在各种实施方案中,分束器214为1至N分束器,其中N为正整数。例如,分束器214可将经放大的第一光束分离成N个主光束(primary beam)。N个主光束中的每个可被提供(例如,经由光纤、波导、自由空间光学路径等提供)到对应的一组非线性光学元件(NOE)218(例如,218A、……、218N)。在各种实施方案中,每组NOE 218被配置为使主光束的频率加倍(例如,将主光束的波长减小两倍)以提供主模式光束。例如,一组NOE218可包括腔内倍频模块,该腔内倍频模块用于使主光束倍频以生成主模式光束。例如,一组NOE 218可包括二次谐波生成模块。在另一示例中,一组NOE 218可包括一个或多个声光调制器(AOM),该声光调制器可用于使主光束的频率加倍以生成主模式光束。在各种实施方案中,一组NOE218可被配置为调节主模式光束。例如,该组NOE 218可包括一个或多个调制器和/或光束成形元件,该一个或多个调制器和/或光束成形元件被配置为根据应用的需要而适当地调制主模式光束,抑制任何不期望的边带和/或谐波,成形主模式光束等。
在各种实施方案中,第二光束从臂分束器204传输至调制器222。例如,第二光束可经由光纤、波导、自由空间光学路径等从臂分束器204传输至调制器222。在示例性实施方案中,调制器222是光纤或波导电光调制器;但是,在各种实施方案中,可使用多种调制器。在各种实施方案中,调制器222可被配置为对第二光束进行相位调制。例如,对第二光束的相位调制(例如,通过调制器222进行的)可生成包括多个边带的光束,该光束相对于第二光束具有移位的频率。在各种实施方案中,边带是比第二光束的频率更高或更低的频带,从该第二光束生成包括多个边带的光束。
在示例性实施方案中,调制器222以Δ/2的频率相位调制第二光束,其中Δ是主模式光束和边带模式光束之间的相对频率差。例如,边带模式中的一个可具有峰值频率,该峰值频率相对于第二光束(和/或第一光束和/或主要光束和/或主光束)移位了大约主模式光束和边带模式光束之间的相对频率差Δ的一半。
然后,可将包括多个边带的光束提供(例如,经由光纤、波导、自由空间光学路径等提供)到功率放大器226A。在各种实施方案中,功率放大器226A被配置为放大和/或增加包括多个边带的光束的强度。然后将功率放大器226A的输出提供到滤波器232。在各种实施方案中,滤波器232是窄带滤波器,被配置为从包括多个边带的经放大的光束中选择期望的边带。在示例性实施方案中,滤波器232是校准器(例如,近红外校准器)。校准器是包括两个反射玻璃板的装置,这两个反射玻璃板可用于选择特定频率的光(例如,基于两个玻璃板之间的距离选择)。在示例性实施方案中,滤波器232位于热控烘箱234内。例如,热控烘箱234可将滤波器232维持在稳定温度下,以便增加滤波器232的边带选择属性的稳定性。例如,热控烘箱234可增加滤波器232传递到功率放大器226B的选定边带的稳定性。在示例性实施方案中,滤波器232将未选择的边带抑制到小于其在包括多个边带的经放大的光束中的强度的1%。在示例性实施方案中,选定边带是相对于第二光束(和/或第一光束和/或主要光束和/或主光束)具有Δ/2的频率差的边带。在各种实施方案中,选定边带光束由滤波器232提供到功率放大器226B。
在各种实施方案中,将选定边带光束提供到功率放大器226B(例如,通过光纤、波导、自由空间光学路径等提供)以进行放大。在各种实施方案中,功率放大器226B包括二次谐波生成(SHG)腔。因此,功率放大器226B可用于放大和/或增加选定边带光束的强度,并且进一步抑制未被滤波器232选择的边带。在示例性实施方案中,功率放大器226B可将未被滤波器232选择的边带抑制大约-30dB。然后,可将经放大的选定边带光束提供到分束器224。例如,经放大的选定边带光束可经由光纤、波导、自由空间光学路径等从功率放大器226B传输到分束器224。在各种实施方案中,分束器224为1至N分束器,其中N为正整数。例如,分束器224可将经放大的选定边带光束分离成N个边带光束。N个边带光束中的每个可被提供(例如,经由光纤、波导、自由空间光学路径等提供)到对应的一组非线性光学元件(NOE)228(例如,228A、……、228N)。在各种实施方案中,每组NOE 228被配置为使边带光束的频率加倍(例如,将边带光束的波长减小两倍)以提供边带模式光束。在各种实施方案中,边带光束和主光束之间的频率差为最终的相对频率差的一半(例如,Δ/2)。边带光束和主模式光束之间的频率差是最终的相对频率差Δ。例如,一组NOE 228可包括腔内倍频模块和/或二次谐波生成模块,用于使边带光束倍频以生成边带模式光束。在另一示例中,一组NOE 228可包括一个或多个AOM,该一个或多个AOM可用于使边带光束的频率加倍以生成边带模式光束。在各种实施方案中,一组NOE 228可被配置为调节边带模式光束。例如,该组NOE 228可包括一个或多个调制器和/或光束成形元件,该一个或多个调制器和/或光束成形元件被配置为根据应用的需要而适当地调制边带模式光束,进一步抑制未选择的边带,成形边带模式光束等。
在各种实施方案中,使边带光束的倍频以生成边带模式光束使选定边带与仍然存在于该边带光束中的任何剩余的未选择的边带之间的频率差增加(例如,加倍)。例如,选定边带在该边带光束中可具有频率f
在各种实施方案中,将主模式光束和边带模式光束作为单个光束(例如,主模式光束和边带模式光束可组合并作为单个门信号提供)递送到捕集器50的一部分(例如,经由光学路径68递送)。在示例性实施方案中,可将主模式光束和边带模式光束作为两个不同的光束(例如,根据应用的需要,同传、非同传、正交或反向传播)提供到捕集器50(例如,经由光学路径68提供)以提供门信号。例如,门信号可以是主模式光束和边带模式光束的组合,该主模式光束和该边带模式光束在光束被提供到捕集器50之前组合,或者与捕集器50内的一个或多个原子对象大致同时和/或半同时地相互作用。
在各种实施方案中,分束器214、224将经放大的第一光束以及经放大的经滤波的第二光束分别分离成N个主光束和N个边带光束。在示例性实施方案中,N对主光束和边带光束可各自被递送到捕集器50的特定部分。例如,第一主光束和第一边带光束可由对应的NOE218A、228A进行调节,以向捕集器50的第一部分提供第一主模式光束和第一边带模式光束,并且第N主光束和第N边带光束可由对应的NOE 218N、228N进行调节,以向捕集器50的第N部分提供第N主模式光束和第N边带模式光束。
在各种实施方案中,使主模式光束和对应边带模式光束之间的相位噪声(例如,相对相位差等)最小化。例如,双色激光系统200的主模式臂210和边带模式臂220的路径长度可大致相等。例如,可将主模式臂210和边带模式臂220的路径长度设计为使得边带模式光束由于通过边带模式臂220的传播和调节而产生的累积相位(相对于第一光束离开臂分束器204时的相位)与主模式光束由于通过主模式臂210的传播和调节而产生的累积相位(相对于第二光束在离开臂分束器204时的相位)大致相等。例如,随着主模式臂210和/或边带模式臂220的光纤长度变化,可测量边带模式光束和主模式光束之间的相位差。基于该测量值,主模式臂210和/或边带模式臂220的最佳光纤长度使得主模式光束和边带模式光束之间的相位噪声和/或相位差最小化和/或被设置为期望值。
在示例性实施方案中,经放大的第一光束(例如,作为功率放大器216的输出提供的)可作为主光束和/或主模式光束提供,并且经放大的选定边带光束(例如,作为功率放大器226B的输出提供的)可作为边带光束和/或边带模式光束提供。换句话讲,示例性实施方案不包括分束器214、224和/或一组或多组NOE 218、228。
在各种实施方案中,伺服系统300用于稳定主模式光束和边带模式光束之间的相对相位和/或相对频率差。在示例性实施方案中,伺服系统300用于通过稳定主模式光束和边带模式光束与参考振荡器的相对相位来抑制主模式光束和边带模式光束之间的相位噪声。在示例性实施方案中,该参考振荡器是低噪声射频(RF)振荡器。在示例性实施方案中,伺服系统300使用双通AOM作为相位/频率致动器,该相位/频率致动器允许通过将计算机控制的直接数字频率合成器(DDS)信号与参考振荡器信号混合来对主模式光束和边带模式光束进行激动的相位/频率控制。DDS信号在多个点处提供到伺服系统300。例如,DDS信号可与参考振荡器混合并作为输入提供到伺服系统300的伺服机构,并且可前馈到AOM致动器。DDS信号的此类前馈提供使得能够在闭环控制下实施准同时和/或接近实时的频率变化和/或相位跳跃。在示例性实施方案中,经由延迟线将DDS信号提供到AOM致动器,该延迟线被配置成对与来自初始DDS施加点(例如,伺服基准点)和AOM致动器的信号传播相对应的声光延迟进行补偿。例如,延迟线的使用使脉冲干扰和伺服扰动最小化,否则这些脉冲干扰和伺服扰动可能在DDS信号传播通过伺服系统300时被引入DDS信号的变化中。在示例性实施方案中,将由第一DDS生成的第一DDS信号提供到伺服系统的输入臂,并且将由第二DDS生成的第二DDS信号提供到伺服系统的输出臂,其中控制第一DDS信号和第二DDS信号的相对定时以考虑和/或补偿初始DDS施加点(例如,位于输入臂中)和AOM致动器(例如,位于输出臂中)之间的声光延迟。在示例性实施方案中,当将主模式光束和边带模式光束作为同传光束提供到捕集器50时,使用伺服系统300来稳定主模式光束和边带模式光束之间的相对频率和/或相位。
在示例性实施方案中,将主模式光束和边带模式光束作为非同传光束提供到捕集器50。在示例性实施方案中,当将主模式光束和边带模式光束作为非同传光束提供到捕集器50时,主模式光束和边带模式光束被锁相到参考振荡器。在示例性实施方案中,该参考振荡器是低噪声本地振荡器。在示例性实施方案中,通过致动AOM来将主模式光束和边带模式光束锁相到参考振荡器。在示例性实施方案中,AOM是在将主光束提供到该组NOE 218、228之前的双通近红外AOM。在示例性实施方案中,在该组NOE 218、228之后测量(例如,基于主模式光束和边带模式光束测量)外差拍频(例如,通过组合主模式光束的至少一部分与边带模式光束的至少一部分而生成的),并且在该组NOE 218、228(例如,作用于主光束和边带光束)之前致动(例如,致动被配置为执行倍频的AOM)。在放大器和/或NOE 218、228的二次谐波生成腔之前致动AOM,使得AOM的操作能够大致没有光学损耗,因为例如就紫外线光束而言,可将光学放大器驱动到饱和。
在各种实施方案中,伺服系统300被配置为提供对主模式光束和边带模式光束的频率和/或相位控制。例如,伺服系统300可被配置为确保相对频率差Δ为期望值和/或不随时间而改变。例如,伺服系统300可被配置为锁定主模式光束和边带模式光束的相对相位,使得主模式光束和边带模式光束之间的相对相位噪声被控制和/或最小化。在另一示例中,伺服系统300可被配置为改变主模式光束和/或边带模式光束的相位。例如,伺服系统300可使主模式光束和/或边带模式光束的相位“跳跃”到所需相位。
在各种实施方案中,主模式光束和边带模式光束的相对频率差Δ、相位和相对相位经由计算机控制的直接数字频率合成器(DDS)信号来控制。例如,DDS信号可用于致动双通AOM。例如,双通AOM可被配置为控制相对频率差Δ、主模式光束的相位、边带模式光束的相位以及/或者主模式光束和边带模式光束之间的相对相位差。将DDS信号提供到AOM和伺服锁定电路两者,使得以前馈方式来提供任何更新。例如,即使当相位更新包括离散和/或不连续的相位变化(例如,相位“跳跃”)时,向AOM和伺服锁定电路两者提供DDS信号也使得能够准同时地更新主模式光束和/或边带模式光束的相位。例如,延迟线可用于将DDS信号耦接到AOM和伺服锁定电路。例如,相对于将DDS信号施加到AOM,延迟线确保对将DDS信号施加到锁定电路的适当定时。
图3A提供了示出示例性伺服系统300的示例性架构的框图。在示例性实施方案中,伺服系统300包括AOM臂310、本地振荡器臂320、伺服输入臂330、伺服机构350和伺服输出臂360。
在各种实施方案中,AOM臂310从一组NOE 218接收主模式光束,并且从一组NOE228接收边带模式光束。将主模式光束和边带模式光束提供到AOM 312。在示例性实施方案中,AOM 312是起到频率/相位致动器作用的双通AOM。图3B示出了示例性AOM 312的示意图。例如,光学路径可经由诸如反射镜382、透镜380、光束分束器378和/或其它无源或有源光学部件的光学元件来定义。光束组合器374将主模式光束392的一部分与边带模式光束394组合以生成拍频光束396。在各种实施方案中,拍频光束396、拍频光束396的频率用于监测主模式光束和边带模式光束之间的相对频率差Δ(例如,经由频率监测器386监测)和/或监测主模式光束和边带模式光束之间的相位差(例如,经由相位差监测器384监测)。在示例性实施方案中,AOM 312包括AOM开关372。在示例性实施方案中,AOM开关372从DDS(例如,DDS35)接收致动信号。在示例性实施方案中,AOM 312还包括可致动AOM 370。在示例性实施方案中,可致动AOM 370接收作为伺服输出臂360的输出提供的信号。在示例性实施方案中,可致动AOM 370是双通AOM。在示例性实施方案中,双通AOM是光学路径两次穿过AOM的AOM。在示例性实施方案中,由可致动AOM370从伺服输出臂360接收的信号是大约30dBm至40dBm的信号。在示例性实施方案中,AOM 312包括光束截捕器376。然而,在各种实施方案中,光束截捕器376可被替换为被配置为接收来自AOM 312的输出的一个或多个测量装置和/或其它光学部件。
在各种实施方案中,如图3A所示,放大器316A接收拍频光束396。放大器316A可放大拍频光束396(例如,增加和/或放大拍频光束的强度)。然后,经由滤波器318对经放大的拍频光束进行滤波。耦合器314和/或分束器用于将经放大的拍频光束提供到用于监测拍频光束的频率和/或相位的监测器386(例如,经由频谱分析仪监测)以及提供到放大器316B。然后,放大器316B可放大所接收部分的经放大的拍频信号,并且将信号提供到伺服输入臂330的混频器334B。
在各种实施方案中,伺服系统300包括多个滤波器318、338A、338B、338C、368。这些滤波器可用于隔离通过伺服系统300传播的光束中的特定色调和/或频率。例如,滤波器可被配置为过滤掉经由放大器生成和/或放大的不期望的边带和/或谐波,过滤掉经由混频器334A、334B、364等混合信号所生成的不期望的混合产物(例如,寄生混合色调)。在各种实施方案中,滤波器318、338A、338B、338C、368防止待从光束中移除的光束中不期望的分量(例如,通过放大、混合、非线性光学功能等生成的分量),以防止伺服系统300进一步处理光束中不期望的分量。
在各种实施方案中,本地振荡器臂320包括至少一个本地振荡器322。在示例性实施方案中,至少一个本地振荡器322是低噪声本地振荡器。在示例性实施方案中,至少一个振荡器322是低噪声射频振荡器。在示例性实施方案中,至少一个本地振荡器322的频率(和/或如果存在多于一个本地振荡器322,则为本地振荡器的频率的组合)基本上类似于量子位空间中两种状态之间的频率差。例如,至少一个本地振荡器322的频率(和/或如果存在多于一个本地振荡器322,则为本地振荡器的频率的组合)可大约等于双色激光束的两个色调的相对相位差Δ。在示例性实施方案中,将本地振荡器信号提供到放大器326以进行放大。在示例性实施方案中,放大器326是功率放大器。在示例性实施方案中,放大器326包括二次谐波生成(SHG)腔。然后,放大器326可任选地将经放大的本地振荡器信号提供到分束器328。例如,在示例性实施方案中,本地振荡器臂320可耦接到多个电路以向多个电路提供本地振荡器信号。在示例性实施方案中,放大器326和/或分束器328将经放大的本地振荡器信号提供到伺服输入臂330的混频器334A。
在各种实施方案中,生成DDS信号35(例如,由控制器30生成,以及/或者控制器30可使DDS生成DDS信号35)。DDS信号35经滤波器338A滤波并提供到分束器332。分束器332将经滤波的DDS信号的一部分提供到延迟线342,并且将经滤波的DDS信号的一部分提供到放大器336A。放大器336A将经放大的经滤波的DDS信号提供到倍增器340。在示例性实施方案中,倍增器340包括二次谐波生成腔。倍增器340使经放大的经滤波的DDS信号的频率加倍以生成倍频DDS信号,该倍频DDS信号然后经滤波器338B滤波。然后,经滤波的倍频DDS信号通过混频器334A与经放大的混合的本地振荡器(LO)信号混合以生成DDS-LO信号。DDS-LO信号由滤波器338C滤波。然后,由放大器336B放大经滤波的DDS-LO信号,之后由混频器334B将经滤波的DDS-LO信号与经放大的拍频信号混合。然后,将DDS-LO拍频信号作为输入提供到伺服机构350。在各种实施方案中,伺服机构350被配置为检测作为其输入提供的光学DDS-LO拍频信号的变化,并且可根据所检测到的光学DDS-LO拍频信号的变化来修改作为伺服机构350的输出提供的电信号。
伺服机构350向伺服输出臂360提供输出信号。在示例性实施方案中,将输出信号作为输入提供到电压控制振荡器(VCO)362,该电压控制振荡器然后基于伺服机构350的电输出信号生成光信号。混频器364接收VCO生成的光信号以及经由延迟线342提供的经滤波的DDS信号。混频器364将VCO生成的光信号以及经滤波的DDS信号组合,然后由滤波器368滤波。然后,将经滤波的VCO-DDS信号提供到至少一个放大器366A、366B,以增加和/或放大经滤波的VCO-DDS信号的强度,之后再将经滤波的VCO-DDS信号作为输入提供到AOM 312(例如,可致动的AOM370)。
因此,伺服系统300提供闭环反馈系统,该闭环反馈系统使主模式光束和边带模式光束能够提供有受控的相对相位差Δ以及受控的和/或最小化的相对相位差。
在各种实施方案中,可使用光纤、波导、自由空间光学等在伺服系统300的各种元件之间传播信号、光束等。在示例性实施方案中,放大器316A、316B、326、336A、336B、366A、366B可以是功率放大器。例如,放大器316A、316B、326、336A、336B、366A、366B中的一个或多个可包括谐振腔等。
各种实施方案提供了在频率、频率偏移和/或相位方面精确和准确地将多频率(例如,双色)激光束递送到捕获原子对象量子计算机的捕集器(例如,在示例性实施方案中,被封闭在低温和/或真空室内的捕集器)的技术问题的技术解决方案。具体地,各种实施方案通过提供激光束和/或具有稳定的相对频率差Δ、稳定的和/或最小化的相对相位差(例如,低相位噪声)的激光束组/激光束对来提供优于传统装置的改进。各种实施方案实现主模式光束和/或边带模式光束的相位的非连续变化。由于主模式光束和/或边带模式光束的相对频率差Δ的稳定性以及相位控制,所以较高保真度地执行使用主模式光束和/或边带模式光束在量子计算机110的量子位上实施的量子门。因此,各种实施方案提供了用于对捕获原子对象量子计算机中的量子位执行操作的较高的门保真度。因此,本发明的实施方案提供了对量子计算机的操作的改进。
在各种实施方案中,量子计算机110还包括控制器30,该控制器被配置为控制量子计算机110的各种元件。在各种实施方案中,控制器30可被配置为使量子计算机110执行各种操作(例如,计算操作,诸如门操作、冷却操作、传输操作、量子位交互操作、量子位测量操作、泄漏抑制操作等)。例如,控制器30可被配置为使操纵源64A、64B向捕集器50内捕获的原子对象提供操纵信号。例如,控制器30可被配置为使双色激光系统200(可能与伺服系统300协调)向捕集器50内捕获的一个或多个原子对象提供一个或多个门信号,以便实施例如一个或多个量子门。在各种实施方案中,控制器30可被配置为对控制低温和/或真空室40内的温度和压力的低温系统和/或真空系统、操纵源64以及/或者控制低温和/或真空室40内的环境条件(例如,温度、湿度、压力等)的其它系统进行控制,并且/或者被配置为操纵和/或引起捕集器50内的一个或多个原子的量子态的受控演变。
如图4所示,在各种实施方案中,控制器30可包括各种控制器元件,包括处理元件405、存储器410、驱动器控制器元件415、通信接口420、模数转换器元件425等。例如,处理元件405可包括可编程逻辑器件(CPLD)、微处理器、协处理实体、专用指令集处理器(ASIP)、集成电路、专用集成电路(ASIC)、现场可编程门阵列(FPGA)、可编程逻辑阵列(PLA)、硬件加速器、其它处理器件和/或电路等,以及/或者控制器。术语电路可指完全硬件实施方案或硬件和计算机程序产品的组合。在示例性实施方案中,控制器30的处理元件405包括时钟和/或与时钟通信。
例如,存储器410可包括非暂态存储器,诸如易失性和/或非易失性存储器存储装置,诸如作为硬盘、ROM、PROM、EPROM、EEPROM、闪存存储器、MMC、SD存储卡、记忆棒、CBRAM、PRAM、FeRAM、RRAM、SONOS、跑道存储器、RAM、DRAM、SRAM、FPM DRAM、EDO DRAM、SDRAM、DDRSDRAM、DDR2 SDRAM、DDR3 SDRAM、RDRAM、RIMM、DIMM、SIMM、VRAM、高速缓存存储器、寄存器存储器等中的一个或多个。在各种实施方案中,存储器410可存储对应于量子计算机的量子位的量子位记录(例如,量子位记录数据存储库、量子位记录数据库、量子位记录表等中的量子位记录)、校准表、可执行队列、计算机程序代码(例如,以一个或多个计算机语言、专用控制器语言等中的计算机程序代码)等。在示例性实施方案中,存储器410中存储的计算机程序代码的至少一部分的执行(例如,通过处理元件405执行)使控制器30执行本文所述的用于跟踪原子系统内原子对象的相位并引起一个或多个操纵源和/或由此生成的信号的相位调整的一个或多个步骤、操作、过程、规程等。
在各种实施方案中,驱动器控制器元件415可包括一个或多个驱动器和/或各自被配置为控制一个或多个驱动器的控制器元件。在各种实施方案中,驱动器控制器元件415可包括驱动器和/或驱动器控制器。例如,驱动器控制器可被配置为使一个或多个对应的驱动器根据由控制器30(例如,由处理元件405)调度和执行的可执行指令、命令等来操作。在各种实施方案中,驱动器控制器元件415可使控制器30能够操作该双色激光系统200、伺服系统300、操纵源64,操作真空和/或低温系统等。在各种实施方案中,驱动器可以是激光驱动器;微波驱动器;真空部件驱动器;低温和/或真空系统部件驱动器;电流驱动器等。例如,驱动器和/或驱动器控制器可被配置为使磁场生成装置(例如,包括耦接到电压源(例如,电流驱动器或电压驱动器)、永磁体和/或它们的组合的电路)在捕集器50的一个或多个位置处生成具有特定方向和量值的磁场。在各种实施方案中,控制器30包括用于传递信号和/或从诸如相机、MEM相机、CCD相机、光电二极管、光电倍增管等的一个或多个光学接收器部件接收信号的装置。例如,控制器30可包括被配置为从一个或多个光学接收器部件、校准传感器等接收信号的一个或多个模数转换器元件425。
在各种实施方案中,控制器30可包括通信接口420,该通信接口用于与计算实体10进行交互和/或通信。例如,控制器30可包括通信接口420,该通信接口用于从计算实体10接收可执行指令、命令集等,并且向计算实体10提供从量子计算机110(例如,从光收集系统)接收的输出和/或处理输出的结果。在各种实施方案中,计算实体10和控制器30可经由直接有线和/或无线连接和/或一个或多个有线和/或无线网络20进行通信。
图5提供了可结合本发明的实施方案使用的示例性计算实体10的例示性示意图。在各种实施方案中,计算实体10被配置为允许用户向量子计算机110提供输入(例如,经由计算实体10的用户界面提供)并且对来自量子计算机110的输出进行接收、显示、分析等。例如,用户可操作计算实体10以生成和/或编程量子算法和/或量子电路(例如,其包括D状态AC-Stark移位门),该量子算法和/或量子电路可被提供成使得控制器30可接收量子算法和/或量子电路,并且使量子计算机110执行该量子算法和/或量子电路。
如图5所示,计算实体10可包括天线512、发射器504(例如,无线电部件)、接收器506(例如,无线电部件)和处理元件508,该处理元件分别向发射器504提供信号并从接收器506接收信号。提供到发射器504的信号以及从接收器506接收的信号分别可包括根据适用的无线系统的空中接口标准的信令信息/数据,以与诸如控制器30、其它计算实体10等的各种实体进行通信。就这一点而言,计算实体10可以能够使用一个或多个空中接口标准、通信协议、调制类型和接入类型进行操作。例如,计算实体10可被配置为使用诸如光纤分布式数据接口(FDDI)、数字用户线路(DSL)、以太网、异步传输模式(ATM)、帧中继器、有线服务接口数据规范(DOCSIS)或任何其它有线传输协议的有线数据传输协议来接收和/或提供通信。类似地,计算实体10可被配置为经由使用诸如以下的多种协议中的任一种的无线外部通信网络进行通信:通用分组无线电服务(GPRS)、通用移动电信系统(UMTS)、码分多址2000(CDMA2000)、CDMA2000 1X(1xRTT)、宽带码分多址(WCDMA)、全球移动通信系统(GSM)、增强型数据速率GSM演进(EDGE)、时分同步码分多址(TD-SCDMA)、长期演进(LTE)、演进型通用陆地无线电接入网络(E-UTRAN)、演进数据最优化(EVDO)、高速分组接入(HSPA)、高速下行链路分组接入(HSDPA)、IEEE802.11(Wi-Fi)、Wi-Fi Direct、802.16(WiMAX)、超宽带(UWB)、红外(IR)协议、近场通信(NFC)协议、Wibree、蓝牙协议、无线通用串行总线(USB)协议和/或任何其它无线协议。计算实体10可使用此类协议和标准来使用边界网关协议(BGP)、动态主机配置协议(DHCP)、域名系统(DNS)、文件传输协议(FTP)、超文本传输协议(HTTP)、TLS/SSL/安全HTTP、互联网消息访问协议(IMAP)、网络时间协议(NTP)、简单邮件传输协议(SMTP)、Telnet、传输层安全(TLS)、安全套接层(SSL)、互联网协议(IP)、传输控制协议(TCP)、用户数据报协议(UDP)、数据报拥塞控制协议(DCCP)、流控制传输协议(SCTP)、超文本标记语言(HTML)等进行通信。
经由这些通信标准和协议,计算实体10可使用诸如非结构化补充服务信息/数据(USSD)、短消息服务(SMS)、多媒体消息服务(MMS)、双音多频信令(DTMF)和/或用户身份模块拨号盘(SIM拨号盘)的概念来与各种其它实体进行通信。计算实体10还可下载对其固件、软件(例如,包括可执行指令、应用程序、程序模块)和操作系统的更改、插件和更新。
计算实体10还可包括用户界面装置,该用户界面装置包括一个或多个用户输入/输出接口(例如,耦接到处理元件508的显示器516和/或扬声器/扬声器驱动器以及耦接到处理元件508的触摸屏、键盘、鼠标和/或麦克风)。例如,用户输出接口可被配置为提供在计算实体10上执行和/或可经由计算实体访问的应用程序、浏览器、用户界面、接口、仪表板、画面、网页、页面和/或在本文中可互换使用的类似字词以使得信息/数据显示或可听地呈现,并且用于经由一个或多个用户输入接口与它们进行交互。用户输入接口可包括诸如以下的允许计算实体10接收数据的多个装置中的任何一个:小键盘518(硬或软)、触摸显示器、声音/语音或运动接口、扫描仪、阅读器或其它输入装置。在包括小键盘518的实施方案中,小键盘518可包括(或使得显示)用于操作计算实体10的常规数字按键(0-9)和相关按键(#、*)以及其它按键,并且可包括完整的一组字母按键或可被激活以提供完整的一组字母数字按键的一组按键。除了提供输入之外,用户输入界面还可用于例如激活或去激活某些功能,诸如屏幕保护程序和/或睡眠模式。通过此类输入,计算实体10可收集信息/数据、用户交互/输入等。
计算实体10还可包括可嵌入和/或可移除的易失性存储装置或存储器522和/或非易失性存储装置或存储器524。例如,非易失性存储器可以是ROM、PROM、EPROM、EEPROM、闪存存储器、MMC、SD存储卡、记忆棒、CBRAM、PRAM、FeRAM、RRAM、SONOS、跑道存储器等。易失性存储器可以是RAM、DRAM、SRAM、FPM DRAM、EDO DRAM、SDRAM、DDR SDRAM、DDR2 SDRAM、DDR3SDRAM、RDRAM、RIMM、DIMM、SIMM、VRAM、高速缓存存储器、寄存器存储器等。易失性和非易失性存储装置或存储器可存储数据库、数据库实例、数据库管理系统实体、数据、应用程序、程序、程序模块、脚本、源代码、目标代码、字节代码、编译代码、解译代码、机器代码、可执行指令等,以实施计算实体10的功能。
本发明所属领域的技术人员在受益于前述描述和相关附图中呈现的教导之后,将想到本文所阐述的本发明的许多修改方案和其它实施方案。因此,应当理解,本公开不限于所公开的特定实施方案,并且修改方案和其它实施方案旨在被包括在所附权利要求的范围内。尽管本文采用了特定术语,但它们仅以一般性和描述性意义使用,而不是出于限制的目的。
- 用于量子计算应用的双色激光器
- 用于光动力疗法的全固态紫、红双色激光器