一种高空球载太阳能无人机系统
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及一种高空球载太阳能无人机系统,属于无人机总体设计技术领域。
背景技术
高空超长航时太阳能无人机飞行高度高、航时久,通常一次起飞可以在20km以上高空驻留数天甚至数月之久。但其飞行速度慢、抗风能力弱,在起降阶段对跑道条件和气象条件有很严苛的要求,在爬升阶段尤其是穿越对流层时往往会被风吹出较远距离。太阳能无人机数天或数月的飞行风险大部分集中在起降和爬升的数小时内,因此选择合适的起降和爬升方式至关重要。同时,从地面到高空全剖面全工况的飞行过程,需要考虑的环节和因素多,也增加了太阳能无人机的设计难度。
现有太阳能无人机多采用自主滑跑起降或车载滑跑起飞方式,这两种方式都存在自身的局限:(1)起降场跑道的长度和宽度需要足够,以避免无人机滑出跑道;(2)起降需在地面侧风速度很小(建议在3m/s以下)时进行,这种起降气象窗口通常很难寻找,并且依赖准确的气象监测手段;(3)太阳能无人机爬升速度(平均在1m/s左右)和飞行速度(平均在10~30m/s)都相对较小,在地面至高空的爬升过程中可能会被大风吹出空域范围;(4)全工况全剖面太阳能无人机的约束条件多、设计难度大,例如高空电机和低空电机的设计就存在很大差异。
国内外也有利用气球挂载投放的无人机设计,但多数以失败告终,失败形式有气球遇强风失踪、无人机脱离后遭遇尾旋坠毁等。球挂载无人机的难点主要是挂点布置、飞行控制和结构强度。
发明内容
本发明的技术解决问题是:克服现有技术的不足,提供了一种高空球载太阳能无人机系统,通过高空气球将太阳能无人机挂载至17km以上高度后释放,实现地面快速起飞、对流层快速穿越和高空安全释放,降低对起飞跑道、气象条件、飞行空域的严苛要求,减小太阳能无人机的设计难度。
本发明的技术解决方案是:
一种高空球载太阳能无人机系统,包括:太阳能无人机、高空气球、吊挂机构、释放机构和牵引绳索;
双机身布局的太阳能无人机其机翼上表面铺装太阳电池,尾翼为V形,机头朝下吊挂在吊挂机构上,挂点有两个,吊挂机构通过牵引绳索挂载在高空气球上,通过高空气球为太阳能无人机提供首日从地面到高空起飞和爬升的拉力;太阳能无人机左右机身尾部各布置有释放机构,待高空气球将太阳能无人机悬吊至指定高度时,将机身尾部的牵引绳索切断,释放太阳能无人机。
进一步的,高空气球将太阳能无人机吊挂起飞爬升至17km以上高空释放,太阳能无人机使用俯冲、拉起、改平的飞行动作,然后留空循环飞行。
进一步的,所述高空气球采用一次性氦气球,根据无人机的重量和尺寸调整气球的规模。
进一步的,所述吊挂机构为碳纤维框架结构,框架整体外形为矩形,由四根横截面为矩形的碳纤维杆组成。
进一步的,所述牵引绳索采用高分子聚乙烯绳,从高空气球引出单根绳索,在吊挂机构上方分成四根并分别连接到矩形框架的四个端点,再从矩形框架四个端点引出四根绳索连接到左右机身尾部,矩形框架每个短边的两个端点引出两根绳索连接同一个机身尾部。
进一步的,所述释放机构采用火工品切绳器,在太阳能无人机左右机身尾部各布置一个,单个火工品切绳器同时将悬吊同一个机身尾部的两根绳索切断。
进一步的,所述太阳能无人机的飞行剖面为:平流层爬升、多日巡航、下滑、着陆。
进一步的,所述太阳能无人机在0~17km高度层的爬升速度平均为3~15m/s,穿越对流层后释放。
进一步的,所述太阳能无人机在17km高度释放,需要的高空气球在17km的体积为
式中m
本发明与现有技术相比的有益效果是:
(1)本发明的高空球载太阳能无人机系统设计难度小,将高空太阳能无人机起飞-对流层爬升-平流层爬升-多日巡航-下滑-着陆的设计剖面简化为平流层爬升-多日巡航-下滑-着陆,工况较简单、约束条件较少。
(2)本发明的高空球载太阳能无人机系统属于垂直起飞,不依托于跑道,在空地上即可开展。
(3)本发明的高空球载太阳能无人机系统起飞阶段对地面侧风无特殊要求,大大拓宽了起飞窗口的选取。
(4)本发明的高空球载太阳能无人机系统爬升速度快,在0~17km高度层的爬升速度平均在3~15m/s,可快速穿越对流层,避免被大风吹出空域。
(5)本发明的高空球载太阳能无人机系统采用机头朝下的吊挂方式,释放后使用俯冲-拉起-改平的飞行动作,安全性较高。
(6)本发明的高空球载太阳能无人机系统吊挂机构和释放机构简单可靠,可实现无人机的稳定吊挂和快速释放。
附图说明
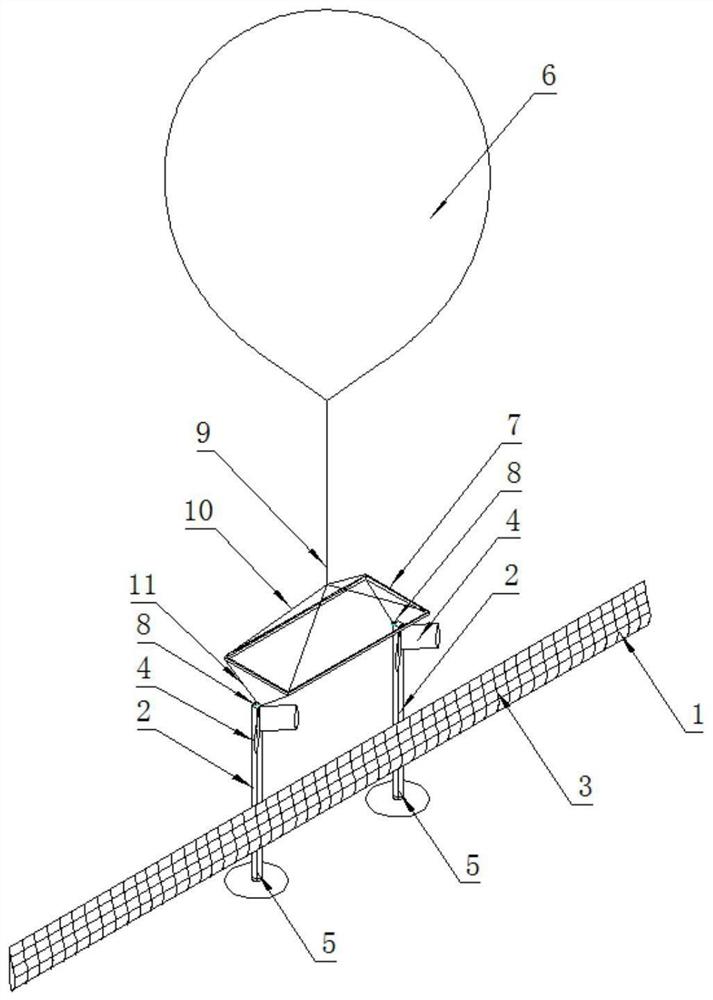
图1为本发明高空球载太阳能无人机系统组成图;
图2为本发明高空球载太阳能无人机系统工作流程图。
具体实施方式
下面结合附图对本发明的具体实施方式进行进一步的详细描述。
如图1至图2所示,本发明提供的一种高空球载太阳能无人机系统,包括太阳能无人机、高空气球、吊挂机构、释放机构以及牵引绳索。
双机身布局的太阳能无人机其机翼上表面铺装太阳电池,尾翼为V形,机头朝下吊挂在吊挂机构上,挂点有两个,吊挂机构通过牵引绳索挂载在高空气球上,通过高空气球为太阳能无人机提供首日从地面到高空起飞和爬升的拉力;太阳能无人机左右机身尾部各布置有释放机构,待高空气球将太阳能无人机悬吊至指定高度时,将机身尾部的牵引绳索切断,释放太阳能无人机。
具体的,太阳能无人机1是一种高空超长航时太阳能无人机,采用双机身2的布局,双机身便于布置两个挂点,保持起飞和爬升过程中无人机的稳定。机翼上表面铺装太阳电池3,尾翼4为“V”形,可以避免牵引绳索对无人机的干涉。机头5朝下吊挂起飞爬升至17km以上高空释放,之后使用俯冲-拉起-改平的飞行动作,然后留空循环飞行数日甚至数月;
太阳能无人机爬升至17km以上高空释放,历史统计气象数据显示我国大部分地区大部分季节在5~16km高度层内的风速大于无人机的空速,释放高度在17km以上可以规避大风的影响。在0~17km高度层的爬升速度平均在3~15m/s,可快速穿越对流层,避免被大风吹出空域。
太阳能无人机机头朝下吊挂,一方面利于释放后的俯冲动作,另一方面可以减小爬升过程中的飞行阻力。
高空气球6采用一次性氦气球,为太阳能无人机提供首日从地面到高空快速起飞和爬升的拉力,根据无人机的重量和尺寸调整气球的规模;一次性氦气球的成本较低、安全性高、技术难度小。
太阳能无人机在17km高度释放,需要的高空气球在17km的体积为:
在海平面的体积为:
V
式中,m
吊挂机构采用轻质高强的碳纤维框架结构,框架整体外形为矩形,由四根横截面为矩形的碳纤维杆7组成;吊挂机构的框架整体外形为矩形,可以分布气球拉力,使无人机机身受力更合理,并能防止绳索出现缠绕。
释放机构8采用火工品切绳器,在太阳能无人机左右机身尾部各布置一个,单个切绳器可同时切断机身尾部的两根绳索;释放机构采用火工品切绳器,在太阳能无人机左右机身尾部各布置一个,便于就近从无人机上取电。
牵引绳索采用高分子聚乙烯绳,高分子聚乙烯绳强度高、密度小、耐磨损,适宜于用做拉绳。从气球引出单根绳索9,分成四根绳索10后连接到矩形框架,再从矩形框架引出四根绳索11连接到左右机身尾部。
如图2所示,本发明的高空球载太阳能无人机系统,将高空太阳能无人机起飞-对流层爬升-平流层爬升-多日巡航-下滑-着陆的设计剖面简化为平流层爬升-多日巡航-下滑-着陆,工况较简单、约束条件较少。
同时,本发明高空球载太阳能无人机系统属于垂直起飞,不依托于跑道,在空地上即可开展,起飞阶段对地面侧风无特殊要求,大大拓宽了起飞窗口的选取。
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
- 一种高空球载太阳能无人机系统
- 一种球载雷达无源稳定平台状态分析系统及状态分析方法