具车速探测功能的盲点探测系统、探测装置及其测速方法
文献发布时间:2023-06-19 11:44:10
技术领域
本发明关于一种盲点探测技术,尤指一种具车速探测功能的盲点探测系统、探测装置及其测速方法。
背景技术
盲点探测(Blind Spot Detection,BSD),为一种常见应用于车辆防止碰撞的安全防护机制,主要通过感测器在车辆行驶过程中进行车辆周围的物体感测,并在探测到物体(例如车辆)接近时产生警示,因此即使车辆驾驶无法从后视镜看见接近的车辆,仍可通过盲点探测功能而得知有车辆靠近并进行处置,从而避免碰撞事故发生。
然而,现有的盲点探测系统于车辆上的应用,有以下问题:
1.现有的车辆的盲点探测系统,除了必须有作动电源外,因车辆必须在行驶中达到一定的车速才会启动盲点探测系统,所以必须撷取所设车辆的车速,盲点探测的结果才能准确。然而,现有的盲点探测系统由于本身并无测速机制,仅能得知标的的相对速度,以汽车为例,必须连接汽车的中央控制系统的控制器区域网路(Controller Area Network,CANbus),才能取得所设汽车的车速讯号以启动盲点探测功能,导致盲点探测系统在汽车上的安装,有额外工序与成本产生的问题;又以摩托车为例,目前使用于摩托车的盲点探测并未连接摩托车车速,因而不论在行驶中或停下时,都会收到盲点探测系统的警示,误警报的机会相当频繁。若要在摩托车的盲点探测装置上加装速度感应,其车速主要依据摩托车本身探测车轮的转动圈数来判断,但每款摩托车的车轮并没有统一的轮径规格,若要将所探测的车速用来启动盲点探测系统,必须依不同车款的各种轮径分别进行车速判断的设定,因此由于撷取车速讯号相当麻烦,导致盲点探测系统应用在摩托车的情况难以普及。
2.再以现有的盲点探测系统安装于汽车为例,通常感测器是安装在后保险杆上,所以在安装时必须先将后保险杆拆下后安装感测器,再将后保险杆装回汽车的车尾,而盲点探测系统与汽车的中央控制系统的控制器区域网路也必须通过线路连接,盲点探测系统才能撷取车速讯号以启动盲点探测系统,不难发现现有的盲点探测系统在汽车的安装上也有安装复杂且难度高的问题。再考虑雷达最佳化的安装校正工作,一般使用者或是传统修车厂根本没有机会自行安装。
因此,如何解决上述现有盲点探测系统在车辆应用的问题,即为本发明的主要重点所在。
发明内容
为解决上述课题,本发明提供一种具车速探测功能的盲点探测系统、探测装置及其测速方法,在于盲点探测系统本身具车速探测功能,而能撷取到所设车辆的车速,从而作为盲点探测功能启动的依据。
本发明的一项实施例提供一种具车速探测功能的盲点探测系统,其设于车辆或摩托车后方以在行驶中进行盲点探测,其包括一讯号收发模组及一中央处理单元。讯号收发模组,其对所述车辆后方一探测区域发出一第一讯号,且获得一经探测区域内的所在物体反射的第二讯号,通过第二讯号进行盲点探测;中央处理单元,其与讯号收发模组电性连接且接收第二讯号,中央处理单元包括一速度计算模组以及一接近物探测模组,速度计算模组计算探测区域内的所在物体与所述车辆的相对速度辨识出静止物和移动物,且依所述车辆与所述静止物的相对速度判断出所述车辆的车速,接近物探测模组以第二讯号辨别探测区域内的接近物以进行盲点探测,中央处理单元借此判断所述接近物距离所述车辆的碰撞可能性。
该中央处理单元包括一众数运算模组,该众数运算模组与该速度计算模组电性连接,该众数运算模组依据该探测区域内的所在物体中相同速度最多的判断所述静止物。
作为进一步的技术方案,该讯号收发模组为毫米波雷达,且探测频段为77GHz。
作为进一步的技术方案,该速度计算模组包括一移动平均累加子模组,所述车辆行驶中沿一时间区间连续测得多个取样车速,并持续对该多个取样车速进行移动平均累加;该移动平均累加子模组另外地预设一误差速度,而沿时间区间先后测得的取样车速的速度差在该误差速度以上时,在后的取样车速不纳入前述移动平均累加。
作为进一步的技术方案,该误差速度为1公里/小时至5公里/小时,而该时间区间为0.05秒至0.3秒。
作为进一步的技术方案,该讯号收发模组发出该第一讯号的角度,为与地面垂直的轴向倾斜5度至30度且朝向地面。
本发明的一项实施例另外地提供一种具车速探测功能的盲点探测系统的探测装置,其包括讯号收发模组、中央处理单元以及一本体。讯号收发模组,其对所述车辆后方探测区域发出第一讯号,且获得经探测区域内的所在物体反射的第二讯号,通过第二讯号进行盲点探测;中央处理单元,其与讯号收发模组电性连接且接收第二讯号,中央处理单元包含速度计算模组以及接近物探测模组,速度计算模组计算探测区域内的所在物体与所述车辆的相对速度辨识出静止物和移动物,且依所述车辆与所述静止物的相对速度判断出所述车辆的车速;讯号收发模组设于本体内,本体设置有一固定部而固定在所述车辆上,以对所述车辆后方的探测区域发出第一讯号。
作为进一步的技术方案,所述车辆为汽车且设置有一后挡风玻璃,该本体通过该固定部固定在该后挡风玻璃内侧。
作为进一步的技术方案,该本体设置有一感测部,该感测部枢设在该固定部,该讯号收发模组设于该感测部,通过该感测部相对该固定部枢摆,调整该讯号收发模组发出该第一讯号的角度。
作为进一步的技术方案,该本体中设有一陀螺仪晶片,进行X、Y、Z轴的水平校对,并在该固定部和该感测部间的枢设处设置一动态稳定器,通过该陀螺仪晶片配合该动态稳定器对该感测部相对该固定部的枢摆进行回授控制,达到全时动态校正水平。
作为进一步的技术方案,该本体还设置有一连接于该感测部的水平仪,校准讯号收发模组发出该第一讯号的角度。
作为进一步的技术方案,所述车辆为摩托车,该本体通过该固定部固定在所述车辆后方的一安装部上。
作为进一步的技术方案,该讯号收发模组包括一第一天线、一第二天线以及一电路板,由该第一天线和该第二天线分别发出该第一讯号,其中该电路板包括一第一板部及一第二板部,该第一天线设于该第一板部上,该第二天线设于该第二板部上,该第一板部与该第二板部设置有一夹角,该夹角介于80度至130度之间。
作为进一步的技术方案,该本体设置有一底座和一外罩,该固定部设于该底座上,且该外罩盖设在该底座上,该第一板部与该第二板部设于该底座而形成该夹角。
本发明的一项实施例另外地提供一种具车速探测功能的盲点探测系统的测速方法,步骤包括雷达探测、速度计算以及车速判断,其中,雷达探测步骤是通过一雷达对所述车辆后方探测区域发出第一讯号,且经探测区域内的所在物体反射而获得第二讯号;速度计算步骤是依据第二讯号,计算探测区域内的所在物体与所述车辆的相对速度而产生一第三讯号;车速判断步骤是依据第三讯号,在探测区域内的所在物体中辨识出静止物和移动物,再依所述车辆与所述静止物的相对速度判断出所述车辆的车速。
作为进一步的技术方案,在该车速判断步骤中,依据该探测区域内的所在物体中相同速度最多的,判断为所述静止物。
作为进一步的技术方案,在该雷达探测步骤中,该雷达的探测频段为77GHz。
作为进一步的技术方案,在该车速判断步骤之后还包括一移动平均累加步骤,所述车辆行驶中沿一时间区间连续测得多个取样车速,并持续对该多个取样车速进行移动平均累加;该移动平均累加步骤预设一误差速度,沿时间区间先后测得的取样车速的速度差在该误差速度以上时,在后的取样车速不纳入前述移动平均累加。
作为进一步的技术方案,在该车速判断步骤中,依据该探测区域内的所在物体中相同速度最多的,判断为所述静止物,各取样车速为对应的时间区间下,所述探测区域内的所在物体中相同速度最多者的速度。
作为进一步的技术方案,该误差速度为1公里/小时至5公里/小时,而该时间区间为0.05秒至0.3秒。
作为进一步的技术方案,该雷达发出该第一讯号的角度,为与地面垂直的轴向倾斜5度至30度且朝向地面。
作为进一步的技术方案,还包括一碰撞时间判断步骤,在该探测区域内的所在物体中,该车速判断步骤被辨识出有移动物为接近物,即产生一警示讯号以驱动一警示器产生警示动作,随所述接近物与所述车辆的碰撞时间由长变短,该警示讯号驱动该警示器产生的警示动作相对由弱变强。
本发明的一项实施例另外地提供一种具车速探测功能的盲点探测系统的探测装置,其设于摩托车上以在行驶中进行盲点侦测,包括:
一讯号收发模组,其对所述摩托车后方一探测区域发出一第一讯号,且获得一经该探测区域内的所在物体反射的第二讯号,通过该第二讯号进行盲点探测,其特征在于:该讯号收发模组包括一第一天线、一第二天线以及一电路板,由该第一天线和该第二天线分别发出该第一讯号,其中该电路板包括一第一板部及一第二板部,该第一天线设于该第一板部上,该第二天线设于该第二板部上,该第一板部与该第二板部设置有一夹角,该夹角介于80度至130度之间;
一中央处理单元,其与该讯号收发模组电性连接,且接收该第二讯号;在该探测区域内的所在物体中辨识出静止物和移动物。
本发明的盲点探测系统及其测速方法,可通过探测区域内的所在物体与车辆的相对速度辨识出静止物和移动物,即可依据车辆与静止物的相对速度判断车速,因此在汽车安装后,不须连接汽车中央控制系统的控制器区域网路即可使用,因此不会有现有盲点探测系统在汽车安装上会有额外工序与成本产生的问题,且能普及应用在摩托车上,以达到于汽车或摩托车等车辆上能快速安装且应用便利的功效。
此外,本发明的盲点探测装置,本体通过其上的固定部固定在所述车辆上,因此安装在汽车上时,不必安装在后保险杆处,而是可以安装在后挡风玻璃上,进一步调整发出第一讯号的角度,因此在汽车的安装上更显得简单且方便。
附图说明
图1为本发明实施例的汽车行驶中的盲点探测状态的示意图;
图2为本发明实施例的盲点探测系统在汽车上连结警示器的示意图;
图3为本发明实施例的汽车用探测装置在后挡风玻璃黏贴示意图;
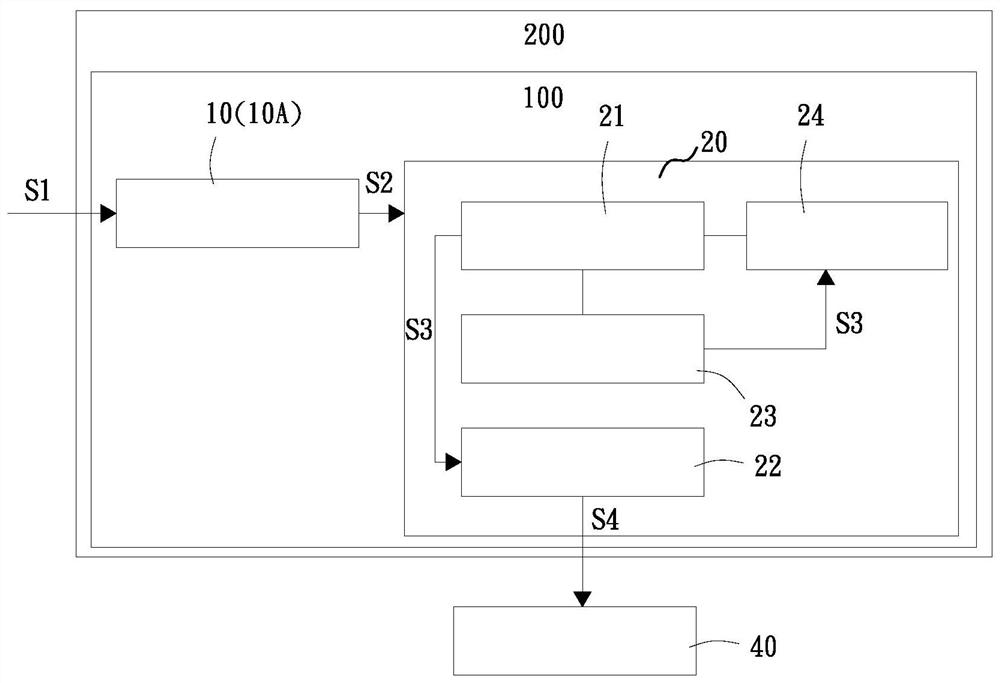
图4为本发明实施例的盲点探测系统及探测装置的方块配置图;
图5为本发明实施例的测速方法的步骤流程图;
图6为本发明实施例的汽车行驶中对后方探测区域所在物体进行探测的示意图;
图7为图6汽车行驶中对后方探测区域所在物体进行探测后所得的相对速度与反射点的众数分布图;
图8为本发明实施例的盲点探测系统沿时间区间所测得N组相对速度与反射点的众数分布图;
图9为依图8的众数分布图所绘制而成的速率平均数随时间变化的曲线图;
图10为本发明实施例的摩托车用探测装置的分解配置图;
图11为本发明实施例的摩托车用探测装置的内部剖视构造图;
图12为本发明实施例的盲点探测系统应用于摩托车时的探测区域示意图。
附图标记说明
1、汽车,2、后挡风玻璃,3、摩托车,4、安装部,100、盲点探测系统,200、探测装置,300、测速方法,301、雷达探测步骤,302、速度计算步骤,303、车速判断步骤,304、移动平均累加步骤,305、碰撞时间判断步骤,400、探测装置,10、讯号收发模组,20、中央处理单元,21、速度计算模组,22、接近物探测模组,23、众数运算模组,24、移动平均累加子模组,30、本体,31、固定部,311、黏胶,32、感测部,33、陀螺仪晶片,34、动态稳定器,35、水平仪,351、气泡,40、警示器,50、本体,51、底座,511、固定部,512、外表面,52、外罩,521、罩部,522、罩部,53、防撞警示灯,10A、讯号收发模组,11A、第一天线,12A、第二天线,13A、电路板,131A、第一板部,132A、第二板部,A~C、汽车,G、地面,L、轴向,S1、第一讯号,S2、第二讯号,S3、第三讯号,S4、第四讯号,Z、探测区域,θ、夹角,B1、夹角,B2、夹角,D1、间距,D2、间距。
具体实施方式
为便于说明本发明于上述发明内容一栏中所表示的中心思想,现以具体实施例表达。实施例中各种不同物件按适于说明的比例、尺寸、变形量或位移量而描绘,而非按实际元件的比例予以绘制。
请参阅图1至图12所示,本发明提供一种具车速探测功能的盲点探测系统100、探测装置200及其测速方法300。在第一个实施例中,所述具车速探测功能的盲点探测系统100,其包括一讯号收发模组10及一中央处理单元20,而盲点探测系统100包括在所述探测装置200内,且探测装置200有一本体30,讯号收发模组10是设在本体30内。
所述车辆,在本实施例中先以汽车1为例,其设置有一后挡风玻璃2(如图1至图2所示),而本体30在本实施例中设置有一固定部31和一感测部32,本体30以固定部31固定在后挡风玻璃2的内侧(如图3所示),而感测部32枢设在固定部31上,借此将本体30设于汽车1后方,以在行驶中进行盲点探测的功能。较佳地,固定部31通过设有黏胶311黏贴在后挡风玻璃2的内侧而固定,但固定部31的固定方式并不以此为限,例如以吸盘吸住亦可。
所述讯号收发模组10,对汽车1后方一探测区域Z发出一第一讯号S1,且获得一经探测区域Z内的所在物体反射的第二讯号S2,盲点探测系统100通过第二讯号S2进行盲点探测。讯号收发模组10在本实施例设于本体30的感测部32上,而本实施例的感测部32枢设在固定部31并且可相对固定部31枢摆,调整对汽车1后方的探测区域Z发出第一讯号S1的角度,此角度较佳地为与地面垂直的轴向L倾斜5度至30度且朝向地面,于本实施例中为15度。
另外,固定部31和感测部32间枢摆后的固定,可以利用锁设固定的方式,当车体在随机震动时,仍有机率在Z轴旋转方向出现不可预期的偏摆导致角度误差,故本实施例的本体30中设有陀螺仪晶片33,以进行X、Y、Z轴的水平校对,并在固定部31和感测部32间枢设处设置一动态稳定器34(Stabilzer Gimbal),以对感测部32相对固定部31的枢摆进行回授控制,达到全时动态校正水平的功效。
本实施例的本体30还设置有一水平仪35,此水平仪35与感测部32连接,以校准讯号收发模组10发出第一讯号S1的角度,即当感测部32相对固定部31枢摆至水平仪35内的气泡351停留在中间位置而呈现平衡状态时,表示第一讯号S1的角度为与地面垂直的轴向L倾斜的角度确定为15度,借此水平仪35的设置可快速且方便地校准第一讯号S1发出的角度。在本实施例中,水平仪35枢设在本体30上从而可纵向枢摆,水平仪35在摆出本体30而横放时为校准状态,而在摆回本体30而立起时为收纳状态。本实施例的水平仪35不限于枢设在本体30,也可以是固定在本体30上而常态位于校准状态。
本实施例的讯号收发模组10是毫米波雷达(mmWave Radar)的应用,且探测频段为77GHz。所述毫米波雷达以探测频段为77GHz发出第一讯号S1时,反射的第二讯号S2在100cm的探测范围内可产生20~30个反射点,平均每4cm即有一反射点,相比于探测频段为24GHz而平均每100cm才有两反射点已具有相对高的解析度。所述探测频段于本发明中也不以77GHz为限,所述探测频段可以是在77GHz之上或之下,而使用不同的探测频段仅在于反射点的解析度的差异,因此凡探测频段在反射点可允许的解析度范围内,皆属于本发明所欲保护的探测频段。
所述中央处理单元20,如图4所示,其与讯号收发模组10电性连接而可接收第二讯号S2,而中央处理单元20包括一速度计算模组21以及一接近物探测模组22,且在一较佳实施例中,中央处理单元20包括一众数运算模组23,众数运算模组23与速度计算模组21电性连接;此外,本实施例的速度计算模组21包括一移动平均累加子模组24。所述接近物探测模组22依所接收的第二讯号S2,辨别探测区域Z内的接近物进行盲点探测,中央处理单元20进而判断所述接近物距离汽车1的碰撞可能性。
所述接近物探测模组22通过第二讯号S2进行盲点探测时,汽车1设有的警示器40在有接近物于探测区域Z趋近汽车1时产生警示动作。所述警示器40,例如本实施例中以两警示灯分别设于汽车1两侧的后视镜位置为例(如图2所示),所述警示器40也可以是蜂鸣器(图中未示),或为前述警示灯和蜂鸣器两者的组合。前述固定部31和感测部32间的枢设处若未设该动态稳定器34可供补偿对准的情况下,凡本体30因坠落、倾斜、移动、转动、撞击或振动所产生剧烈或微小变化,都能够被陀螺仪晶片33探测出来,并进行雷达失效警示(如禁用雷达探测功能,使警示器40为警示灯时红光长亮,或警示器40为蜂鸣器长时间鸣叫)。
上述内容,为说明本发明所提供一种具车速探测功能的盲点探测系统100以及探测装置200的一具体实施例,以下进一步说明具车速探测功能的盲点探测系统100的测速方法300,如图5所示,包括雷达探测步骤301、速度计算步骤302以及车速判断步骤303,且本实施例中进一步包括移动平均累加步骤304以及碰撞时间判断步骤305,其中:
在雷达探测步骤301中,本实施例以讯号收发模组10(即前述毫米波雷达)对汽车1后方一探测区域Z发出一第一讯号S1,且获得一经探测区域Z内的所在物体反射的第二讯号S2,盲点探测系统100通过第二讯号S2进行盲点探测。例如图6所示,汽车1在道路行驶的过程中,由讯号收发模组10对汽车1后方探测区域Z发出第一讯号S1,探测区域Z在此以汽车1正后方120度角的水平范围为例,此时在探测区域Z的所在物体包括汽车A、汽车B、汽车C以及汽车1所行驶的道路的地面G,第一讯号S1经汽车A、汽车B、汽车C以及地面G反射而获得所述第二讯号S2,此时盲点探测系统100即可通过第二讯号S2进行盲点探测。
在速度计算步骤302中,依据第二讯号S2,由本实施例的速度计算模组21计算探测区域Z内的所在物体与汽车1的相对速度,并且产生一第三讯号S3,此第三讯号S3即为探测区域Z内的所在物体与所述车辆的相对速度的信息。举例来说,假设汽车1是以时速60公里/小时的车速在道路上行驶,汽车A和汽车B分别以时速30公里/小时和50公里/小时的车速在道路上和汽车1同向行驶,汽车C则以时速40公里/小时的车速在道路上和汽车1反向行驶,此时经速度计算模组21的计算可得到汽车1和汽车A的相对速度为30公里/小时,汽车1和汽车B的相对速度为10公里/小时,汽车1和汽车C的相对速度因反向行驶而为100公里/小时,而汽车1与地面G的相对速度为60公里/小时,且在探测区域Z内的所在物体获得的反射点中,以地面G的反射点为最多而为所有反射点的众数,且当众数累加达到一定数量时即输出该众数对应的相对速度,这些相对速度的信息为第三讯号S3所包含。
在车速判断步骤303中,依据第三讯号S3,在探测区域Z内的所在物体中辨识出何为静止物,且何为移动物,再依据汽车1与辨识为静止物的相对速度判断出汽车1的车速。如图7所示,为众数运算模组23依据第三讯号S3中所获得汽车1与地面G、汽车A、汽车B以及汽车C间相对速度的反射点分布,可见以相对速度为60公里/小时的反射点的分布区域为最多而为众数,而在达到一定数量时,由众数运算模组23判断地面G为所述静止物,而汽车1与地面G的相对速度即为汽车1的车速(60公里/小时)。
所述移动平均累加步骤304为汽车1在行驶中沿时间区间T连续测得多个取样车速,并以移动平均累加子模组24持续对该多个取样车速进行移动平均累加。上述的时间区间T,较佳为0.05秒至0.3秒,而在本实施例设定为0.1秒,即众数运算模组23在间隔每0.1秒的时间就计算一次相对速度最多的众数以确定静止物,并判断汽车1对应的车速为所述取样车速,所以当汽车1行驶一段时间,沿每0.1秒的时间区间T可连续测得N组取样车速(如图8所示),移动平均累加子模组24持续对所测得的N组取样车速进行移动平均累加,而可沿汽车1行驶的时间而获得一速率平均数随时间变化的曲线(如图9所示),此曲线也表示汽车1于行驶中的车速变化。
本实施例在移动平均累加步骤304中,由移动平均累加子模组24预设一误差速度,沿时间区间T先后测得的取样车速的速度差如果在误差速度以上时,在后的取样车速不纳入前述移动平均累加。较佳地,所述误差速度为1公里/小时至5公里/小时,在本实施例中则将误差速度预设为5公里/小时。举例来说,假设汽车1在某一时间区间T确认地面G为所述静止物而测得取样车速为60公里/小时,随后有多部汽车快速接近汽车1后方,接着也维持60公里/小时的车速行驶而占住大部分的探测区域Z,此时汽车1与后方的多部汽车的相对速度为0公里/小时,在前述众数运算模组23的判断下,众数会被误认为是趋近的多部汽车而被判断为静止物,此时取样车速为0公里/小时,在0.1秒的时间区间内,因两取样车速间的速度差已明显超出误差速度预设的5公里/小时,此时0公里/小时的取样车速会被排除在移动平均累加步骤304外,不纳入移动平均累加,以避免造成车速误判的情况发生。
在本实施例中,还包括一碰撞时间判断步骤305,在探测区域Z内的所在物体中,车速判断步骤303被辨识出有移动物为接近物,即产生一警示讯号S4以驱动警示器40产生警示动作,随所述接近物与汽车1的碰撞时间由长变短。实际上,碰撞时间可与输出讯号的工作周期相关连(如控制PWM),因此该警示讯号S4可驱动警示器40产生的警示动作相对由弱变强。所述警示器40以前述的警示灯为例,接近物与汽车1的碰撞时间由长变短时,以警示灯的亮度由暗变亮、闪烁频率由慢变快、色光对比度或是调变光色(如绿/黄/红)来辨识紧急程度;再以前述的蜂鸣器为例,接近物与汽车1的碰撞时间由长变短时,峰鸣器的响声由小变大。
盲点探测系统100有车道变换辅助模式(Lane Change Assistance , LCA),此车道变换辅助模式中可透过车辆的控制器区域网路上的方向灯信号、方向盘产生的舵角信号搭配上述碰撞时间判断步骤305,在高碰撞风险系数下进行加重告警,如输入方向灯信号时警示器40瞬间以代表危险的红光灯号或极高闪烁频率输出。
本发明所述静止物除所指地面(道路)外,还包括路边护栏、路树或电线杆等固定而不会移动的物体;本发明所述移动物,除所指地面行驶的汽车外,还包括摩托车、行人或动物等会移动的物体。本发明所述接近物,指的是所述移动物相对靠近汽车1,例如汽车1后方有汽车 (或摩托车)进入探测区域Z内且正在靠近汽车1,即可视汽车1后方的汽车 (或摩托车)为所述接近物。
上述为本发明具车速探测功能的盲点探测系统100、探测装置200及其测速方法300于汽车1应用的第一实施例。本发明的第二实施例应用于摩托车3,其中盲点探测系统100及其测速方法300与汽车1的应用大致相同,与第一实施例的主要差异在于本实施例的探测装置400和汽车1的探测装置200有所差异,其中:
本实施例的探测装置400,如图10所示,其设置有一本体50,本体50设置有一底座51和一外罩52,固定部511设于底座51可供螺栓锁设,且外罩52盖设在底座51。本体50通过固定部511固定在摩托车3后方的一安装部4(如图12所示),而此安装部4在此为车牌固定处。
本实施例的讯号收发模组10A,如图10所示包括一第一天线11A、一第二天线12A以及一电路板13A,由第一天线11A和第二天线12A分别发出第一讯号S1,其中电路板13A还包括一第一板部131A及一第二板部132A,第一天线11A设于第一板部131A,该第二天线12A设于第二板部132A,第一板部131A与第二板部132A在本实施例中因设于底座51而形成一夹角θ。较佳地,夹角θ介于80度至130度之间,在本实施例中夹角θ约为120度。在本实施例中以第一天线11A和第二天线12A两组天线发出第一讯号S1,因此在本实施例的探测区域Z可达到摩托车3正后方240度角的范围(如图12所示)。
在第二实施例中,第一天线11A、第二天线12A及电路板13A均设置在本体50中。
如图11所示,第一板部131A与底座51的外表面512形成夹角B1,第二板部132A与底座51的外表面512形成夹角B2,其可满足下列条件:25度 ≤ B1 ≤ 50度;以及25度 ≤ B2≤ 50度。借此,有助于以底座51直接贴附于摩托车3的安装部4,既能简化探测装置400在车体的安装工序,又可维持预期的探测角度及范围。第二实施例中,夹角B1为30度,夹角B2为30度。
探测装置400的厚度是由底座51的外表面512算起且为厚度HT,其可满足下列条件:15 mm ≤ HT ≤ 50 mm。借此,摩托车的车体多为金属材质,考虑电磁波回波问题,探测装置400并不适于安装在摩托车3内部。另外,探测装置400安装在摩托车3外表面时不致于过于凸出(例如不凸出于尾灯的范围)以符合相关规定,且满足前述夹角θ或夹角B1、夹角B2条件范围的探测装置400在进一步满足前述参数HT条件范围时仍有足够的探测角度及范围。第一实施例中,参数HT约为29.9 mm。
如图11所示,外罩52还包括二两个罩部521、522。罩部521的厚度本质上一致,罩部522的厚度本质上一致,排除了由不可避免的制造公差所导致的厚度不均的情况。第一板部131A (即第一天线11A的信号发射源的位置)与罩部521平行且其之间有间距D1,第二板部132A (即第二天线12A的信号发射源的位置)与罩部522平行且其之间有间距D2,其可满足下列条件:0 mm < D1 ≤ 5 mm;以及0 mm < D2 ≤ 5 mm。借此,外罩52设置有小型化设计且可降低其透镜效应而避免聚焦或分散的雷达波,使探测装置400具有广角探测的功能,并具有抗振性以降低杂讯。较佳地,其可满足下列条件:2 mm ≤D1 ≤ 3 mm;以及2 mm ≤ D2≤ 3 mm。此实施例中,间距D1为2.5 mm,间距D2为2.5 mm。本发明的实施例中,外罩52中的二罩部521、522分别接近第一板部131A及第二板部132A,底座51远离第一板部131A及第二板部132A之间的间距较小的一侧。
本发明的其他实施例中(图未揭示),探测装置400若想远距探测,邻近及面对第一板部131A及第二板部132A的外罩52的两个罩部521、522的表面可设计为曲面以产生透镜效应,简单地说各罩部521、522像是能改变雷达波方向的“电磁透镜”,各罩部521、522的表面曲率与其材质的介电常数有关,各罩部521、522不同的形状(也可说是电磁透镜形状)将产生不同的电场相位。此外,当各罩部521、522的外表面为凸面时,若有灰尘或雨水等附着于各罩部的外表面,在摩托车3行进时因为空气的流动,这些附着物将容易顺着外表面的曲面形状被吹走,从而维持各罩部521、522的电磁透镜特性,即不会因为灰尘或雨水的影响而改变各罩部521、522的表面曲率或雷达波路径的长度。除此之外,邻近及面对第一板部131A及第二板部132A的外罩52的两个罩部521、522的表面也可设置有光触媒镀膜(如含有TiO2成分的金属氧化物),在阳光或紫外线照射下,会降解表面有机物,从而达到催化效果。因此附着在其表面的油污或细菌,在阳光的照射下,会变成二氧化碳和水,并且紫外线照射下的光触媒镀膜同样还获得了超亲水性,由于其超亲水性,水膜会浸入灰尘与超亲水涂层之间,轻松就将灰尘抬走,减少灰尘在发射面所产生的干扰。
除此之外,通过盲点探测系统100及其测速方法300的应用,同样可进行盲点探测,在摩托车3的后视镜位置安装前述的警示器40以作为警示,通过盲点探测系统100本身具有的测速功能即可启动盲点探测。
在本实施例中,盲点探测系统100还包括防撞警示灯53(如闪光灯、讯号灯和投地灯),其由外壳的罩部52向外照射。借此,当通过探测装置400进行盲点探测且配置防撞警示灯53时,在BSD(Blind Spot Detection)盲点探测及车道变换辅助模式 (Lane ChangeAssistance , LCA)时可随所述接近物与本车的碰撞时间由长变短切换后方防撞警示灯53的亮度由暗变亮、闪烁频率由慢变快、色光对比度或是调变光色(如绿/黄/红),来警示后方接近车辆及早减速或回避达到主动告警的功效。
由上述的说明不难发现本发明的特点,在于:
本发明的盲点探测系统100及其测速方法300,是可通过探测区域Z内的所在物体与汽车1或摩托车3等车辆的相对速度辨识出何为静止物,又何为移动物,即可依据车辆和静止物的相对速度判断出车辆在行驶中的车速,进而通过车速信息以启动盲点探测系统100的盲点探测功能,这种自带测速功能的盲点探测系统100在汽车1上安装后,不必再撷取车辆本身的车速讯号,因此就汽车而言就不必连接汽车1中央控制系统的控制器区域网路即可使用,相比于现有的盲点探测系统100来说,在汽车1安装上不会有额外工序与成本产生的问题。且如上述的说明可知,盲点探测系统100因自带测速功能,因此在摩托车3安装后不必计算轮径即可取得车速信息,因此能普遍地应用在摩托车3上,从而达到于汽车1或摩托车3等车辆上能快速安装且应用便利的功效。
此外,本发明的盲点探测装置200,本体30通过其上设置的固定部31固定在汽车1,因此盲点探测装置200安装在汽车1时,不必安装在后保险杆处,而可安装在后挡风玻璃2上,进一步也能调整发出第一讯号S1的角度,相较于现有的盲点探测的感测器必须安装在后保险杆上,本发明在汽车1的安装上更显得简单且方便。另外地摩托车3用的盲点探测装置400,也只要将本体50通过固定部511固定在摩托车3后方,如前述车牌固定处,即可完成安装及使用,同样在安装上亦显得简单且方便。
以上所举实施例仅用以说明本发明而已,非用以限制本发明的范围。凡不违本发明精神所从事的种种修改或变化,均属本发明意欲保护的范畴。
- 具车速探测功能的盲点探测系统、探测装置及其测速方法
- 探测车辆盲点区域内运动物体的方法及盲点探测装置