水准尺的调平装置和调平方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明属于机械领域,尤其涉及一种水准尺的调平装置和调平方法。
背景技术
现有的水准尺,申请号为:201921169720.5,授权公告号为:210291281U发明名称为:《一种水准尺尺垫》,公开一种可调平装置,且可以绕尺垫转动,但是该装置还是脱离不了人工干预,需要手动调节尺垫水平,它是依靠放置在第一调节板顶部的水平仪来调平的。
发明内容
本发明的目的在于提出一种水准尺的调平装置和调平方法,它可以实现尺身自动调平。
本发明的技术实施方案是:水准尺的调平装置,包括尺身、第一可伸缩支撑杆、第一测距传感器、第一测量装置和嵌入式系统,所述第一可伸缩支撑杆通过第一连接件与尺身相连,所述第一可伸缩支撑杆包括第一电机和第一伸缩装置,所述第一电机驱动第一伸缩装置伸缩,或者所述第一可伸缩支撑杆包括可相对伸缩的第一液压系统或第一气压系统,所述第一测量装置位于第一可伸缩支撑杆内或者位于第一电机内用于检测第一可伸缩支撑杆的伸缩量或者长度,在尺身底端和靠近第一可伸缩支撑杆与尺身相连处之间有可转动的第一测距传感器,所述第一测距传感器安装在靠近尺身长度方向边缘,第一测距传感器用于测量从第一测距传感器所在点发出的激光到达第一可伸缩支撑杆之间的水平距离,嵌入式系统获取第一测距传感器和第一测量装置的数据并计算出在尺身处于垂直状态下的第一可伸缩支撑杆的长度,从而控制第一可伸缩支撑杆的伸缩。
本发明由于采用上述方案,嵌入式系统获取第一测距传感器和第一测量装置的数据并计算出在尺身处于垂直状态下的第一可伸缩支撑杆的长度,从而控制第一可伸缩支撑杆的伸缩。通过嵌入式系统控制第一可伸缩支撑杆的运动,从而实现调平状态。嵌入式系统可以有效控制完成尺身调平问题,解决了传统尺子调平速度慢的问题。
优选的,所述第一测量装置为第一长度传感器或者第一位移传感器,第一长度传感器位于第一可伸缩支撑杆内用于检测第一可伸缩支撑杆的长度;第一位移传感器位于第一可伸缩支撑杆内用于检测第一可伸缩支撑杆的伸缩量;或者第一测量装置包括第一角度传感器或者第一圈数传感器,所述第一角度传感器或第一圈数传感器位于第一电机内,分别用于测量第一电机转动的角度,或者第一电机转速已知的,从而推导出第一电机转动的圈数、伸缩距离与时间的关系,第一角度传感器或第一圈数传感器由定时器控制第一电机转动时间,从而控制第一可伸缩杆的伸缩量。
本发明由于采用上述方案,第一测量装置可以测量第一可伸缩支撑杆的长度或者伸缩量,用于辅助测量第一可伸缩支撑杆在垂直状态下的长度,利于调平。
优选的,还包括第二可伸缩支撑杆、第二测距传感器和第二测量装置,所述第二可伸缩支撑杆通过第二连接件与尺身相连,所述第二可伸缩支撑杆包括第二电机和第二伸缩装置,所述第二电机带动第二伸缩装置伸缩,或者所述第二可伸缩支撑杆包括可相对伸缩的第一液压系统或第一气压系统,所述第二测量装置位于第二可伸缩支撑杆内或者位于第二电机内用于检测第二可伸缩支撑杆的长度,在尺身底端和靠近第二可伸缩支撑杆与尺身相连处之间有可转动的第二测距传感器,所述第二测距传感器安装在尺身正面或者背面且靠近尺身长度方向边缘,第二测距传感器用于测量从第二测距传感器所在点发出的激光到达第二可伸缩支撑杆之间的水平距离,嵌入式系统获取第二测距传感器和第二测量装置的数据并计算出在尺身处于垂直状态下的第二可伸缩支撑杆的长度,从而控制第二可伸缩支撑杆的伸缩。
本发明由于采用上述方案,还包括第二可伸缩支撑杆、第二测距传感器和第二测量装置,嵌入式系统获取第二测距传感器和第二测量装置的数据并计算出在尺身处于垂直状态下的第二可伸缩支撑杆的长度,从而控制第二可伸缩支撑杆的伸缩。通过嵌入式系统控制第二可伸缩支撑杆的运动,从而实现调平状态。嵌入式系统可以有效控制完成尺身调平问题,解决了传统尺子调平速度慢的问题。
优选的,所述第二测量装置包括第二长度传感器或者第二位移传感器,第二长度传感器位于第二可伸缩支撑杆内用于检测第二可伸缩支撑杆的伸缩量或长度;第二位移传感器位于第二可伸缩支撑杆内用于检测第二可伸缩支撑杆的伸缩量;或者第二测量装置包括第二角度传感器或者第二圈数传感器,所述第二角度传感器或第二圈数传感器位于第二电机内,分别用于测量第二电机转动的角度,或者第二电机转速已知的,从而推导出第二电机转动的圈数、伸缩距离与时间的关系,第二角度传感器或第二圈数传感器由定时器控制第二电机转动时间,从而控制第二可伸缩杆的伸缩量。
本发明由于采用上述方案,第二测量装置可以测量第二可伸缩支撑杆的长度或者伸缩量,用于辅助测量第二可伸缩支撑杆在垂直状态下的长度,利于调平。
优选的,还包括第一、第二万向轮,第一、第二万向轮分别安装在第一、第二可伸缩支撑杆的末端,第一万向轮内置第三电机、第一方向传感器,第二万向轮内置第四电机、第二方向传感器,嵌入式系统获取第一、第二方向传感器的数据,经计算控制第三、第四电机的转动,从而控制万向轮的滚动方向。
本发明由于采用上述方案,采用万向轮方便控制伸缩杆的方向,利于尺身面对面。
优选的,所述第一连接件、第二连接件位于尺身的中上部,所述第一伸缩装置包括第一固定杆和第一伸缩杆,第一固定杆和第一伸缩杆可相对伸缩的连接,所述第一电机带动第一固定杆或者第一伸缩杆使第一固定杆与第一伸缩杆可相对伸缩,所述第二伸缩装置包括第二固定杆和第二伸缩杆,第二固定杆和第二伸缩杆可相对伸缩的连接,所述第二电机带动第二固定杆或者第二伸缩杆使第二固定杆与第二伸缩杆可相对伸缩,第一、第二伸缩杆上分别有第一、第二直齿轮,第一固定杆套接在第一伸缩杆上,第二固定杆套接在第二伸缩杆上,第一、第二电机分别固定在第一、第二固定杆的内壁上,第一、第二电机上分别有第一、第二轴齿,第一、第二电机上的轴齿分别与第一、第二直齿轮紧密啮合,第一、第二电机转动时会带动第一、第二轴齿转动,第一、第二轴齿带动第一、第二直齿轮做伸缩运动。
本发明由于采用上述方案,第一、第二伸缩杆采用第一、第二直齿轮,方便第一、第二伸缩杆的伸缩。
优选的,所述第一连接件包括第一、第二横杆,第一横杆套接于第二横杆,第一横杆另一端与尺身相连,第二横杆的另一端与第一可伸缩支撑杆的第一伸缩杆相连接,第一、第二横杆之间可以伸缩且第二横杆可绕第一横杆360度转动。
本发明由于采用上述方案,第一、第二横杆之间可以伸缩且第一横杆可绕第二横杆360度转动控制方便。
优选的,还包括尺垫,尺垫包括上转盘,上转盘上固定有套筒,所述套筒底部是四周围起来的,在四周的四边缘向上沿伸围片,用于包裹住尺身的四边缘,所述尺身固定于套筒内,在尺身下部开有多个柱孔,在上转盘上固定有凸柱,尺垫上转盘上的凸柱和柱孔相咬合,多个柱孔与凸柱紧密配合,在上转盘上的凸柱下表面设置有控制接头和电源接头与尺身上的柱孔上表面接口相连。
本发明由于采用上述方案,上转盘上有固定尺身的套筒,且尺身下部开有多个柱孔,柱孔与上转盘上的凸柱相咬合,使尺身牢固的固定在上转盘上且有控制接头和电源接头方便电连接。
本发明的另一种技术实施方案是:水准尺的调平装置,包括尺身、第三可伸缩支撑杆、第三测量装置、第三测距传感器、陀螺仪或倾角传感器和嵌入式系统,所述第三可伸缩支撑杆通过第三连接件与尺身相连,所述第三可伸缩支撑杆包括第八电机和第三伸缩装置,所述第八电机驱动第三伸缩装置伸缩,或者所述第三可伸缩支撑杆包括可相对伸缩的第三液压系统或第三气压系统。第三测量装置位于第三可伸缩支撑杆内或者第八电机内用于检测第三可伸缩支撑杆的长度,在尺身底端和靠近第三可伸缩支撑杆与尺身相连处之间有与尺身始终垂直且可沿尺身的垂直面转动的第三测距传感器,所述第三测距传感器安装在尺身正面或者背面且靠近尺身长度方向边缘,用于测量从第三测距传感器所在点发出的垂直于尺身的激光到达第三可伸缩支撑杆之间的距离,嵌入式系统获取第三测量装置、第三测距传感器和陀螺仪或倾角传感器的数据并计算出在尺身处于垂直状态下的第三可伸缩支撑杆的长度,从而控制第三可伸缩支撑杆的伸缩。
本发明由于采用上述方案,嵌入式系统获取第一测量装置、第一测距传感器和陀螺仪或倾角传感器的数据并计算出在尺身处于垂直状态下的第一可伸缩支撑杆的长度,从而控制第一可伸缩支撑杆的伸缩,通过嵌入式系统控制可伸缩支撑杆的运动,从而实现调平状态。使嵌入式系统可以有效控制完成尺身调平问题,解决了传统尺子调平速度慢的问题。
本发明的另一种技术实施方案是:水准尺的调平方法,包括如下步骤:嵌入式系统获取第一测距传感器和第一测量装置的数据,计算得到第一可伸缩支撑杆的长度,进而控制第一可伸缩支撑杆做伸缩运动,实现尺身处于垂直状态,实现可伸缩支撑杆调平。
本发明由于采用上述方案,水准尺调平方法,嵌入式系统获取第一测距传感器和第一测量装置的数据,计算得到第一可伸缩支撑杆的长度,进而控制第一可伸缩支撑杆做伸缩运动,实现尺身处于垂直状态,实现可伸缩支撑杆调平。
本发明的另一种技术实施方案是:水准尺的调平方法,包括如下步骤:嵌入式系统获取第一测距传感器、陀螺仪或倾角传感器和第一测量装置的数据,计算得到第一可伸缩支撑杆的长度,进而控制第一可伸缩支撑杆的做伸缩运动,实现尺身处于垂直状态,实现可伸缩支撑杆调平。
本发明由于采用上述方案,水准尺调平方法,嵌入式系统获取第一测距传感器、陀螺仪或倾角传感器和第一测量装置的数据,计算得到第一可伸缩支撑杆的长度,进而控制第一可伸缩支撑杆做伸缩运动,实现尺身处于垂直状态,实现可伸缩支撑杆调平。
附图说明:
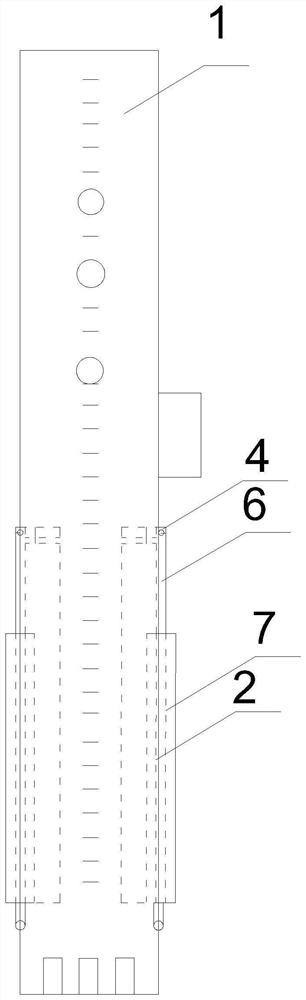
图1为本发明实施例一主视简图;
图2为本发明实施例一左视简图;
图3为本发明实施例一底垫及尺身结构简图;
图4为本发明实施例一第一可伸缩撑杆或者第二可伸缩支撑杆第一种实施例的结构简图;
图5为本发明实施例一第一可伸缩撑杆或者第二可伸缩支撑杆第二种实施例的结构简图;
图6为本发明实施例一第一可伸缩撑杆或者第二可伸缩支撑杆第三种实施例的结构简图;
图7为本发明实施例一第一可伸缩撑杆或者第二可伸缩支撑杆第四种实施例的结构简图;
图8为本发明实施例一第一可伸缩撑杆或者第二可伸缩支撑杆第五种实施例的结构简图;
图9为本发明实施例一第一可伸缩撑杆或者第二可伸缩支撑杆第六种实施例的结构简图;
图10为本发明实施例一第一可伸缩撑杆或者第二可伸缩支撑杆第七种实施例的结构简图;
图11为本发明实施例一第一可伸缩撑杆或者第二可伸缩支撑杆第八种实施例的结构简图;
图12为调平前可伸缩支撑杆原状态图;
图13为第一种实施例可伸缩支撑杆模拟调平图;
图14为第二种实施例可伸缩支撑杆模拟调平图。
附图标记说明:1、尺身;2、第一可伸缩支撑杆;3、第一测距传感器;4、第一连接件;5、第一电机;6、第一固定杆;7、第一伸缩杆;8、第一直齿轮;9、第一轴齿;10、第三测距传感器;11、套筒;13、尺垫;14、上转盘;15、下底盘;21、第七电机;22、第七电机轴;23、围片。
具体实施方式:
为了使本发明的目的、技术方案的原理及优点更加清晰,以下结合附图及具体实施方案,对本发明进行进一步详细说明。在本实施方式中,所描述的具体实施方案仅仅用以解释本发明,并不用于限定本发明。
实施例一
如图1和图2所示,水准尺的调平装置,包括尺身1、第一可伸缩支撑杆2、第一测距传感器3、第一测量装置和嵌入式系统,第一可伸缩支撑杆2通过第一连接件4与尺身1相连,第一可伸缩支撑杆2包括第一电机5和第一伸缩装置,第一电机5驱动第一伸缩装置伸缩,第一可伸缩支撑杆2通过第一电机5的驱动可相对调节第一可伸缩支撑杆2伸缩,或者第一可伸缩支撑杆包括可相对伸缩的第一液压系统或第一气压系统,第一测量装置位于第一可伸缩支撑杆2内或者位于第一电机5内用于检测第一可伸缩支撑杆2的长度,在尺身底端和靠近第一可伸缩支撑杆2与尺身1相连处之间的尺身1上设有可转动的第一测距传感器3,第一测距传感器3能够水平转动和竖直转动,第一测距传感器3位于尺身上,它可靠近尺身长度方向边缘放置,第一测距传感器3安装在尺身正面或者背面或者侧面且靠近尺身长度方向边缘,第一测距传感器3用于测量从第一测距传感器3所在点发出的激光到达第一可伸缩支撑杆2之间的水平距离,嵌入式系统获取第一测距传感器3和第一测量装置的数据并计算出在尺身处于垂直状态下的第一可伸缩支撑杆2的长度,从而控制第一可伸缩支撑杆2的伸缩。
所述第一测量装置为第一长度传感器或者第一位移传感器,第一长度传感器位于第一可伸缩支撑杆内用于检测第一可伸缩支撑杆的长度;第一位移传感器位于第一可伸缩支撑杆内用于检测第一可伸缩支撑杆的伸缩量;或者第一测量装置包括第一角度传感器或者第一圈数传感器,所述第一角度传感器或第一圈数传感器位于第一电机5内,分别用于测量第一电机5转动的角度,或者第一电机5转速已知的,从而推导出第一电机5转动的圈数、伸缩距离与时间的关系,第一角度传感器或第一圈数传感器由定时器控制第一电机5转动时间,从而控制第一可伸缩杆的伸缩量。
还包括第二可伸缩支撑杆、第二测距传感器和第二测量装置,所述第二可伸缩支撑杆通过第二连接件与尺身相连,所述第二可伸缩支撑杆包括第二电机和第二伸缩装置,所述第二电机带动第二伸缩装置伸缩,所述第二可伸缩支撑杆通过第二电机的驱动可相对调节第二可伸缩支撑杆伸缩,或者所述第二可伸缩支撑杆包括可相对伸缩的第一液压系统或第一气压系统,所述第二测量装置位于第二可伸缩支撑杆内或者位于第二电机内用于检测第二可伸缩支撑杆的长度,在尺身底端和靠近第二可伸缩支撑杆与尺身相连处之间有可转动的第二测距传感器,所述第二测距传感器安装在尺身正面或者背面或者侧边且靠近尺身长度方向边缘,第二测距传感器用于测量从第二测距传感器所在点发出的激光到达第二可伸缩支撑杆之间的水平距离,嵌入式系统获取第二测距传感器和第二测量装置的数据并计算出在尺身处于垂直状态下的第二可伸缩支撑杆的长度,从而控制第二可伸缩支撑杆的伸缩。
所述第二测量装置包括第二长度传感器或者第二位移传感器,第二长度传感器位于第二可伸缩支撑杆内用于检测第二可伸缩支撑杆的伸缩量或长度;第二位移传感器位于第二可伸缩支撑杆内用于检测第二可伸缩支撑杆的伸缩量;或者第二测量装置包括第二角度传感器或者第二圈数传感器,所述第二角度传感器或第二圈数传感器位于第二电机内,分别用于测量第二电机转动的角度,或者第二电机转速已知的,从而推导出第二电机转动的圈数、伸缩距离与时间的关系,第二角度传感器或第二圈数传感器由定时器控制第二电机转动时间,从而控制第二可伸缩杆的伸缩量。
如图4所示,第一、第二可伸缩支撑杆分别包括第一、第二电机和第一伸缩装置、第二伸缩装置,第一、第二伸缩装置分别包括第一固定杆6、第二固定杆和第一伸缩杆7、第二伸缩杆。第一固定杆6和第一伸缩杆7可相对伸缩的连接,所述第一电机5带动第一固定杆6或者第一伸缩杆7使第一固定杆6与第一伸缩杆7可相对伸缩,第二固定杆和第二伸缩杆可相对伸缩的连接,所述第二电机带动第二固定杆或者第二伸缩杆使第二固定杆与第二伸缩杆可相对伸缩,第一固定杆7套接在第一伸缩杆6上,第二固定杆套接在第二伸缩杆上,第一、第二伸缩杆上分别有第一直齿轮8、第二直齿轮,第一、第二伸缩杆设在第一、第二固定杆的内部,第一、第二电机固定在第一、第二固定杆的内壁上,第一、第二电机上有第一、第二轴齿,第一、第二电机上的第一轴齿9、第二轴齿与第一、第二伸缩杆上的第一直齿轮8、第二直齿轮紧密啮合,第一、第二电机转动时会带动第一轴齿9、第二轴齿转动,第一、第二轴齿带动第一、第二直齿轮做伸缩运动,第一、第二电机带动第一、第二伸缩杆相对于第一、第二固定杆上下伸缩和固定。第一、第二电机转动时会带动第一、第二轴齿转动,第一、第二轴齿带动第一、第二直齿轮做伸缩运动。第一、第二伸缩杆通过第一、第二连接件与尺身相连。所述第一连接件、第二连接件位于尺身的中上部,第一、第二伸缩杆的底部固定有万向轮。
如图11所示,与实施例一第一可伸缩撑杆或者第二可伸缩支撑杆第一种实施例不同之处在于:第一、第二伸缩杆设在第一、第二固定杆的内部,第一、第二电机固定在第一、第二伸缩杆的端部,第一、第二电机上有第一、第二轴齿,第一、第二电机上的第一、第二轴齿与第一、第二固定杆上的第一、第二直齿轮紧密啮合,第一、第二电机转动时会带动第一、第二轴齿转动,第一、第二轴齿带动第一、第二直齿轮做伸缩运动,第一、第二电机带动第一、第二伸缩杆相对于第一、第二固定杆上下伸缩和固定。第一、第二电机转动时会带动第一、第二轴齿转动,第一、第二轴齿带动第一、第二直齿轮做伸缩运动。第一、第二伸缩杆通过第一、第二连接件与尺身相连。所述第一连接件、第二连接件位于尺身的中上部,第一、第二固定杆的底部固定有万向轮。
如图5所示,第一或第二可伸缩支撑杆包括第五电机、第三固定杆和第三伸缩杆。第三伸缩杆与第三固定杆相套接,第三伸缩杆设在第三固定杆的内部,第五电机固定在第三固定杆的内壁上,第三伸缩杆上有螺纹,第五电机上有第三轴齿,第五电机上的第三轴齿与第三伸缩杆上的螺纹紧密啮合,第五电机转动时会带动第三轴齿转动,第三轴齿带动螺纹做伸缩运动,第五电机带动第三伸缩杆相对于第三固定杆上下伸缩和固定。第三伸缩杆通过第一或第二连接件与尺身相连。第三固定杆的底部固定有万向轮。
如图6所示,第一或第二可伸缩支撑杆包括第三液箱、第三液缸、第三柱体,第三柱体一端固定有万向轮,第三柱体的另一端置于第三液缸的腔体内,第三液缸顶部通过第一或第二连接件与尺身相连。在第三液缸的腔体内还放置有第三液箱,第三液箱上有从第三液箱通往第三液缸的第三单向阀(未示出)和使液体从第三液缸回流到第三液箱的第三液压阀(未示出)。
如图7所示,第一或第二可伸缩支撑杆包括第三液箱、第三液缸、第三柱体,第三柱体一端通过第一或第二连接件与尺身相连,第三柱体的另一端置于第三液缸的腔体内,第三液缸底部固定有万向轮。第三液箱放置于第三液缸的腔体内,第三液箱上有从第三液箱通往第三液缸的第三单向阀(未示出)和使液体从第三液缸回流到第三液箱的第三液压阀(未示出)。
如图8所示,第一或第二可伸缩支撑杆包括第六电机、第四液箱、第四液缸,第四液箱上有第四单向阀(未示出)和第四液压阀(未示出),第四液箱的底部固定有万向轮,第四液缸顶部通过第一、第二连接件与尺身相连,第四液箱竖直插入第四液缸中,第四液箱内有第四活塞杆,第六电机安装于第四液箱的内侧壁,第六电机上的第三传动轴齿与第四活塞杆上的齿条或螺纹紧密啮合。
如图9所示,第一或第二可伸缩支撑杆包括第六电机、第四液箱、第四液缸,第四液箱上有第四单向阀(未示出)和第四液压阀(未示出),第四液箱的顶部通过第一、第二连接件与尺身相连,第四液缸底部固定有万向轮,第四液箱竖直插入第四液缸中,第四液箱内有第四活塞杆,第六电机安装于第四液箱的内侧壁,第六电机上的第三传动轴齿与第四活塞杆上的齿条或螺纹紧密啮合。
如图10所示,第一或第二可伸缩支撑杆包括第一无杆腔、第一有杆腔、第一双向电磁阀,第一有杆腔内有第三活塞杆,所述第三活塞杆的顶部通过第一、第二连接件与尺身相连,第一无杆腔的底壁固定有万向轮;第一有杆腔的出口和入口经第一双向电磁阀连接至第一无杆腔的入口和出口,第一有杆腔的出口经第一双向电磁阀连接至第一无杆腔的入口,第一无杆腔的出口经第一双向电磁阀连接至第一有杆腔的入口,由数字陀螺仪或倾角传感器测出角度值由嵌入式系统计算出第一有杆腔或第一无杆腔的伸缩量,从而确定气体的流量和时间,气体的流量、时间由嵌入式系统上的定时器来控制,也可以直接通过气位传感器来测量第一有杆腔或第一无杆腔中的气体量,通过嵌入式系统来控制第一双向电磁阀的开关控制气体量从而控制第一有杆腔或第一无杆腔的伸缩量,也可以直接通过嵌入式系统计算出第三活塞杆的伸缩量,使第一双向电磁阀到达相应的节点关闭,第一双向电磁阀的节点由嵌入式系统设定好。每个第一无杆腔、第一有杆腔、第一双向电磁阀和第三活塞杆的参数各不相同。
如图1和图2所示,水准尺的调平装置,包括尺身,尺身上有多个不同间距的水准测量摄像头,水准测量摄像头垂直于尺身,尺身的横截面为椭圆形,水准尺的调平装置还包括两根可伸缩支撑杆和第一、第二、第三和第四测距传感器,两根可伸缩支撑杆分别为第一可伸缩支撑杆和第二可伸缩支撑杆,第一、第二可伸缩支撑杆通过第一、第二连接件与尺身相连,第一、第二连接件位于尺身的中上部,第一可伸缩支撑杆包括第一电机5、第一固定杆、第一伸缩杆、第一长度传感器,第二可伸缩支撑杆包括第二电机、第二固定杆、第二伸缩杆、第二长度传感器,第一伸缩杆与第一固定杆相套接,第一伸缩杆设在第一固定杆的内部,第一伸缩杆上有第一直齿轮,第一电机5带动第一伸缩杆相对于第一固定杆上下伸缩和固定,第一电机5固定在第一固定杆的内壁上,第一电机5上有第一轴齿,第一电机5上的第一轴齿与第一直齿轮紧密啮合,第一电机5转动时会带动第一轴齿转动,第一轴齿带动第一直齿轮做伸缩运动,第二固定杆与第二伸缩杆相套接,第二伸缩杆套接在第二固定杆的内部,第二伸缩杆上有第二直齿轮,第二电机带动第二伸缩杆相对于相套接的第二固定杆上下伸缩和固定,第二电机固定在第二固定杆的内壁上,第二电机上有第二轴齿,第二电机上的第二轴齿与第二直齿轮紧密啮合,第二电机转动时会带动第二轴齿转动,第二轴齿带动第二直齿轮做伸缩运动,第一、第二连接件分别位于尺身的左右中上部凹槽内侧,在尺身底端和第一可伸缩支撑杆与尺身相连处之间有可转动的第一测距传感器,在尺身底端和第二可伸缩支撑杆与尺身相连处之间有可转动的第二测距传感器,如图2所示,第一测距传感器安装在第一可伸缩支撑杆所在的尺身侧面且靠近尺身长度方向边缘,第一测距传感器用于测量从第一测距传感器所在点发出的激光到达第一可伸缩支撑杆之间的水平距离。第二测距传感器安装在第二可伸缩支撑杆所在的尺身侧面且靠近尺身长度方向边缘,第二测距传感器用于测量从第二测距传感器所在点发出的激光到达第二可伸缩支撑杆之间的水平距离。嵌入式系统获取第一、第二测距传感器和第一、第二长度传感器的数据,从而计算出第一、第二可伸缩支撑杆的伸长或缩短量。控制第一、第二电机的转动,从而带动第一、第二伸缩杆相对于相套接的第一、第二固定杆上下伸缩和固定,从而控制尺身的调平。第一、第二长度传感器分别位于第一、第二可伸缩支撑杆上用于测量支撑在各个状态下的长度和作为控制第一、第二可伸缩支撑杆的伸缩长度的依据。第一、第二可伸缩支撑杆在调平之前,可单独由嵌入式系统单独控制伸长缩短,其主要目的是使打开的第一、第二可伸缩支撑杆支撑在地面上更方便。还包括第一、第二万向轮,第一、第二万向轮分别安装在第一、第二可伸缩支撑杆的末端,分别内置第三电机、第一方向传感器和第四电机、第二方向传感器,第一、第二方向传感器将数据传送给嵌入式系统,经计算控制第三、第四电机的转动,从而控制万向轮的滚动方向。万向轮的滚动和制动是靠低速第三、第四电机来完成的,主要作用是带动第一、第二可伸缩支撑杆的移动和使尺身微调。总结:两个可伸缩支撑杆连有两个万向轮,两个可伸缩支撑杆和万向轮包括4个电机2个长度传感器和2个方向传感器,一支可伸缩支撑杆包括一个电机和一个长度传感器,一个万向轮包括一个电机和一个方向传感器,另一支可伸缩支撑杆包括一个电机和一个长度传感器,另一个万向轮包括一个电机和一个方向传感器,一个电机安装在可伸缩支撑杆的内壁与直齿轮紧密啮合,一个电机安装在万向轮内。水准尺的调平装置的尺身上开有第一、第二凹槽,第一、第二凹槽分别设计在尺身的两侧,所述第一连接件包括第一、第二横杆,第一可伸缩支撑杆的第一伸缩杆通过第一、第二横杆分别连接于尺身上第一凹槽内,第二可伸缩支撑杆的第二伸缩杆通过第三、第四横杆分别连接于尺身上第二凹槽内,第一横套接于第二横杆,第一横杆另一端与尺身相连,第二横杆的另一端与第一可伸缩支撑杆的第一伸缩杆相连接,第一、第二横杆之间可以伸缩且第二横杆可绕第一横杆360度转动。第一、第二横杆和第三、第四横杆可以收缩和转动(注射器原理,方便第一、第二可伸缩支撑杆的伸出和缩回,转动方便改变第一、第二可伸缩支撑杆的位置。第一、第二可伸缩支撑杆可在竖向360°转动。第一横杆末端与第一可伸缩支撑杆末端通过螺杆连接,第三横杆末端与第二可伸缩支撑杆末端通过螺杆连接,方便第一、第二可伸缩支撑杆转动)。第一、第二凹槽用于第一、第二可伸缩支撑杆内切在凹槽内不额外占用空间使水准尺更美观,易存放。第一、第二凹槽内置U型夹(防止可伸缩支撑杆在存放时从第一、第二凹槽脱离损坏第一、第二可伸缩支撑杆和水准尺),两侧的横轴是断开的,互不干扰运动。可伸缩支撑杆具体的结构可以参见,申请号为:201920798001.3专利公告号为:209820450U发明名称为:《智能水准尺》中的内容。
如图3所示,水准尺的调平装置,还包括尺垫13、第七电机21和角度传感器,尺身1为椭圆形,尺垫包括上转盘14和下底盘15,下底盘中心孔固定第七电机21,上转盘中心对称的固定于第七电机轴22上,角度传感器位于第七电机21内,用于测量第七电机轴22转动的角度,上转盘上固定有套筒11,尺身1固定于尺垫的上转盘的套筒11内,套筒11底部是四周围起来的,在四周的四边缘向上沿伸围片23,用于包裹住尺身1的四边缘,这样不影响伸缩支撑杆的运动,在尺身下部开有多个柱孔,在上转盘上固定有凸柱,尺垫上转盘上的凸柱和柱孔相咬合,多个柱孔与凸柱紧密配合,使尺身牢牢的卡在上转盘的表面,加大尺子稳定性和尺身与尺垫的连接效果,达到尺垫尺身合二为一,在上转盘上的凸柱上表面设置有控制和电源接头与尺身上的柱孔下表面接口相连。
实施例二
水准尺的调平装置,包括尺身、第三可伸缩支撑杆、第三测量装置、第三测距传感器10、陀螺仪或者倾角传感器和嵌入式系统,第三可伸缩支撑杆通过第三连接件与尺身相连,第三可伸缩支撑杆包括第八电机和第三伸缩装置,第八电机驱动第三伸缩装置伸缩,第三可伸缩支撑杆通过第八电机的驱动可相对调节第一可伸缩支撑杆伸缩,或者第三可伸缩支撑杆包括可相对伸缩的第三液压系统或第三气压系统。第三测量装置位于第三可伸缩支撑杆内或者第八电机内用于检测第三可伸缩支撑杆的长度,在尺身底端和靠近第三可伸缩支撑杆与尺身相连处之间有与尺身始终垂直且可沿尺身的水平面转动的第三测距传感器10,第三测距传感器10安装在第三可伸缩支撑杆所在的尺身侧面且靠近尺身长度方向边缘,用于测量从第三测距传感器10所在点发出的激光到达第三可伸缩支撑杆之间的垂直距离,嵌入式系统获取第三测量装置、第三测距传感器10和陀螺仪或者倾角传感器的数据并计算出在尺身处于垂直状态下的第三可伸缩支撑杆的长度,从而控制第三可伸缩支撑杆的伸缩。
实施例三
水准尺的调平方法,包括如下步骤:
1)选择可伸缩支撑杆调平;
1A)如果选择可伸缩支撑杆调平,将尺子的可伸缩支撑杆打开支撑在地面上通过配套的手机app点击调平中的可伸缩支撑杆调平进行水准测量装置的调平,嵌入式系统控制可伸缩支撑杆和万向轮转动,嵌入式系统按照预先确定好的转动方向,转动水准测量摄像头,调节前后视尺,直到水准测量摄像头能看到尺身为止,停止转动万向轮,使尺身面对面;嵌入式系统读取数字陀螺仪或者倾角传感器的数据,进行计算,由嵌入式系统控制两个可伸缩支撑杆电机及两个万向轮的电机转动,实现可伸缩支撑杆调平;微调万向轮和可伸缩支撑杆,使尺身面对面。
1A1)如果选择水准测量,嵌入式系统接收水准测量摄像头的测量数据及水准测量摄像头自身位置数据,经过计算处理,将测量结果传送至终端。所述终端包括电脑客户端、手机客户端和显示器,完成测量和数据的共享。
电源:安装在尺身内。接线分析:电源线:从电源正负极接到嵌入式系统,从电源的负极分别接到第一电机5、第二电机、第三电机、第四电机、第五电机、第六电机、第一测距传感器3、第二测距传感器、第三测距传感器10、第四测距传感器、第一长度传感器、第二长度传感器、第一角度传感器、第二角度传感器、第一圈数传感器和第二圈数传感器;第一电机、第二电机、第三电机、第四电机、第五电机、第六电机、第一测距传感器3、第二测距传感器、第三测距传感器10、第四测距传感器、第一长度传感器、第二长度传感器、第一角度传感器、第二角度传感器、第一圈数传感器和第二圈数传感器正极从嵌入式系统接出。控制线从嵌入式系统控制端接出至第一电机、第二电机、第三电机、第四电机、第五电机、第六电机、第一测距传感器、第二测距传感器、第三测距传感器10、第四测距传感器、第一长度传感器、第二长度传感器、第一角度传感器、第二角度传感器、第一圈数传感器和第二圈数传感器。
证明:
如图12、图13所示,在可伸缩支撑杆调平状态下的调平,如图12为调平前原状态图,图13为模拟调平图,具体工作原理如下:
注:第一、第二激光测距传感器和第一、第二可伸缩支撑杆与尺身连接点是固定的,所以OB,BC,OC,OA的长度是已知的。OC=OA的长度
证明:通过激光测距传感器测出BD的距离
∵BD∥OE,
∴∠COE=∠CBD,∠CEO=∠CDB,
又∵∠OCE为公共角
∴△OEC相似于△BDC
∴CB/OC=BD/OE
OE=OC·BD/CB
∴由上式可得OE的长度
又∵∠AOE是直角,OE和OA是已知长度
通过勾股定理可以证明出RT△AOE中AE的长度:AE2=OE2+OA2
通过可伸缩支撑杆里的第一、第二长度传感器可以测得原长CE
要使尺身调平垂直于测量面可伸缩支撑杆的伸长量为;AE-CE=伸长量。
如图14所示
A点为支撑杆与尺身的交点(连接点)
B点为激光点,它与尺身垂直,通过可伸缩支撑杆长度传感器可以测得原长AD
在RTΔABC中,由于B点和A点位置固定,BC为激光测距距离
∴AB已知;BC已知
∵AC
又∵AC/∠ABC=BC/∠BAC
∠BAC=BC∠ABC/AC
∴求得AC,∠BAC的值,
在ΔAOD中,AO、AD、∠OAD已知
∵OD
又∵COS∠AOD=(OA
∴可求得OD,∠AOD的值
在ΔEOD中,∠EOA由倾角或陀螺仪测取
∠EOD=∠AOD+∠EOA(已知),OE,OD已知
ED
∴可求得ED长度
伸长量=ED-AD
本发明解决如下问题:
1.减少了二到三个水准测量人员。传统需要3~4人才能进行水准测量。
2.解决了测量数据易丢失问题,传统的都是记录在纸上,记录容易丢失。
3.解决了传统测量数据无法共享的问题(如数据共享给相关的部门监理、甲方、乙方、相关的检测部门,这样就可以减少了很多的工作量)。
4.解决了水准测量数据的精度问题,传统的水准测量是通过两支水准尺(标尺)和一台水准仪进行水准测量,水准测量时受人为因素影响比较大(水准尺和水准仪的调平直接影响测量结果的准确性,还有就是测量人员在观看水准仪的位置和估读数据都会影响测量结果)1、人为扶尺,不能保证尺子垂直于地面,2、读数为人为观看,每个人看数习惯不同,看到的结果也不同,存在误差,3、在计算的时候因为有估读或者计算错误,都会带来误差。
5.解决了传统测量速度慢的问题,传统的水准测量是通过人工测量人工计算,人工测量和计算相对现在发明的水准尺的测量装置来说比较慢,如果测量或计算错误都会重新进行测量相比之下更慢。人工扶尺,尺子向前或向后倾都会影响测量数据,用本发明的产品调平精准,摄像头看过去是精确垂直的,测量数据是精准的,全部人工智能化可以加速测量过程。
6.解决了尺身不能自动微调问题,传统的水准尺都是人工扶尺。人工扶尺不能达到微调。
另外,同样本发明还解决了如下问题:
第一 安全问题:体现了数据安全性和人的安全性,因为设备下雨的情况下,记录纸会打湿用不了,另外施工现场会出现塌方危及人的安全,或者在高速公路上,在恶劣环境下,如天气很热,人会中暑,如果用我们的机器不需要人来操作,避免人在酷热的环境下进行测量,带来的不必要的损失。
第二 人力成本问题和施工周期问题:传统的需要三个人去测量,并没办法保证数据的精确度,本产品能够节省周期、节省人力成本,增大数据的准确性。