一种适用于锚具结构健康监测的CFRP传感器布点方法
文献发布时间:2024-01-17 01:26:37
技术领域
本发明属于土木工程桥梁缆索的结构健康监测领域,尤其涉及一种适用于锚具结构健康监测的CFRP传感器布点方法。
背景技术
针对在役大跨桥梁缆索结构健康状况的监测,接触式结构健康监测方法是在锚具内部或表面黏贴传感元件(电子类应变计、光纤FBG传感器),从而对结构的安全性能进行监测预警。传统接触式监测方式的传感器布点一般采用轴向等距或者轴向阵列的方式,但这种监测方式存在监测区域分区不清晰,测点布置不够精确等问题。
发明内容
为了解决现有技术中存在的不足,本发明提出了一种适用于锚具结构健康监测的CFRP传感器布点方法,本申请根据锚具受力特征,构建其应力/应变分布的梯度函数;通过分析有限元模拟锚具受力后的应力分布,基于分布式传感理念与应力/应变分布的梯度函数确定锚具上的传感器布点;再通过理论推导构建传感器与被监测结构之间的界面应力分布函数,确定每个传感器布点处的CFRP传感器的尺寸。
为了实现上述目的,本发明所采用的技术方案如下:
一种适用于锚具结构健康监测的CFRP传感器布点方法,包括如下步骤:
步骤1,根据锚具受力特征,构建锚具的应力/应变分布的梯度函数;
步骤2,根据海森矩阵法对应力/应变分布梯度函数求极值点,所述极值点为传感器布置点;
步骤3,基于传感器布置点处的正应力、剪应力以及传感器长度构建传感器与被监测结构之间的界面应力分布函数,基于界面应力分布函数确定每个传感器布置点处CFRP传感器的布置尺寸。
进一步,所述锚具的应力/应变分布的梯度函数表示为:ε(x)
其中,a是梯度函数中三次项系数;b是梯度函数中二次项系数;c是梯度函数中一次项系数;d是梯度函数中常数项系数;x
进一步,所述界面应力分布函数表示为:
dσ
其中,τ(x)为传感器布置点处剪应力;C
进一步,利用有限元仿真软件对锚具进行受力仿真,获得传感器布置点处的正应力,将正应力代入界面应力分布函数,获取传感器布置点处的剪应力和CFRP传感器的长度。
进一步,所述传感器布置点之间的距离关系表示为:
其中,L(x)
进一步,对锚具轴向受力进行仿真得到应力分布,选取应力阈值对锚具进行分区;在应力值超过阈值的区域,根据海森矩阵法对应变梯度分布函数求极值点,获取传感器布置点。
本发明的有益效果如下:
1、本发明所提出的一种适用于锚具结构健康监测的CFRP传感器布点方法,本方法中通过理论推导构建出锚具的轴向应力/应变分布梯度函数,根据海森矩阵法对应力/应变分布梯度函数求极值点,并将极值点作为传感器的布置点。相较于现有技术中采用等间距随机设置传感器布置点,本申请将极值点作为传感器的布置点能够保证监测点的测量精度。且本申请在获取布置点之后能够得到布置点之间的位置关系,便于在实际应用中直接确定监测点在锚具上的位置。
2、本发明所提出的一种适用于锚具结构健康监测的CFRP传感器布点方法,本方法中通过分析有限元模拟锚具受力后的应力分布,基于分布式传感理念,根据应力数值的大小对锚具进行分区,且可以仅在应力较高的区域内根据海森矩阵法对应变梯度分布函数求极值点,确定传感器布置点的位置与间距;可以减少传感器的安装数量,节约工程检测中的成本,以及数据处理的工作量。
3、本发明所提出的一种适用于锚具结构健康监测的CFRP传感器布点方法,较其他监测方法,本方法中通过理论推导,构建传感器与被监测结构之间的界面应力分布函数,根据传感器测点的应变大小,优化传感器的布置尺寸。
4、本发明所提出的一种适用于锚具结构健康监测的CFRP传感器布点方法,基于分布式传感理念的整套传感器布点方式,具有较好的可行性、优异性与可靠性,可以在未来的大跨/超大跨桥梁的锚固系统中实现监测与预警,为智慧运维提供技术支持。
附图说明
图1为弧锥型锚具图;
图2为锚具受力模型图;
图3为有限元模拟后锚具应力分布图;
图4为锚具,粘结层,传感器界面受力分析图;
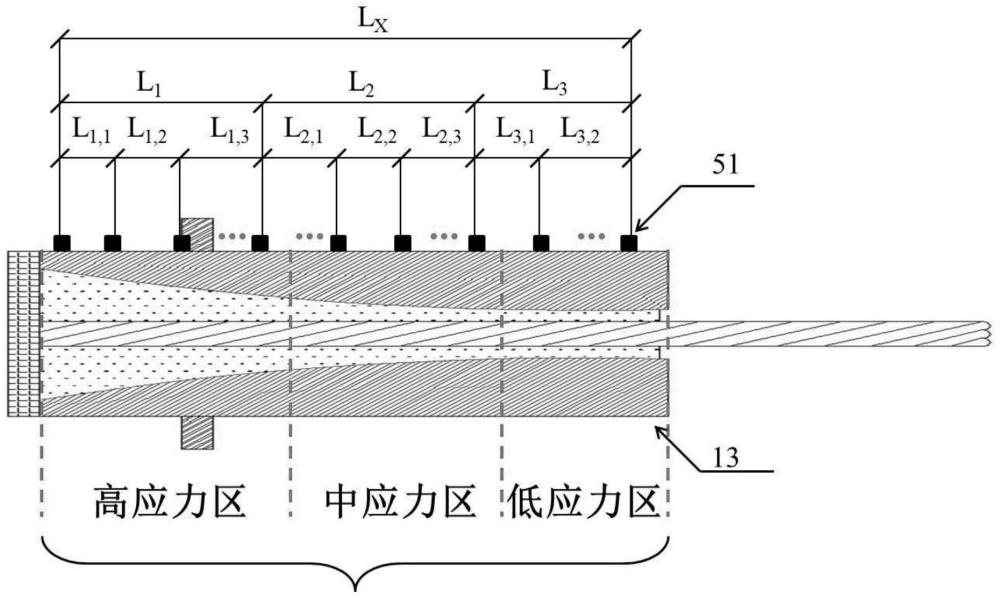
图5为CFRP传感器分布图;
图1中:11、锚具定位板,12、螺母,13、锚筒,14、粘结剂,15、CFRP绞线;
图3中:31、低应力区锚,32、高应力区,33、中应力区,34、自由端,35、张拉端;图5中:51、CFRP传感器。
具体实施方式
为了使本发明的目的、技术方案及优点表述清楚,下述将结合附图及实施例对本发明内容进行详细说明。应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限制本发明。
结合附图1-5,本申请提出了一种适用于锚具结构健康监测的CFRP传感器布点方法,包括如下步骤:
步骤1,根据锚具受力特征,构建锚具的应力/应变分布的梯度函数。在本实施例中,以弧锥型锚具为例进行说明,弧锥型锚具包括锚具定位板11、螺母12、锚筒13、粘结剂14、CFRP绞线15。
根据易损性分析理论,将锚筒内侧当作一根水平横梁并将其划分为n个单元,单元i上的轴力为F
F
其中,i=1,2,…,n;N
由于θ∈(0°,90°),则有水平横梁单元之间的轴力为:
F
由式(2)可知,作用在水平横梁上的轴力沿着梁长方向是递增或者递减的。基于对轴力的分析这一结论,可以进一步进行应变梯度分析。
对于水平横梁上单元i,取单元单位1的轴向拉伸长度,即:
其中,i=1,2,…,n;F
上式(3)中,由于E,A,1均是材料常数,故结合式(2)有:
Δ1
对于竖向纵梁,其单元j的变形伸长量为:
其中,j=1,2,…,n-1;i=1,2,…,n;b是任意截面宽度。
作用在每根竖向纵梁上的轴向拉力为:
将式(5)带入式(6)可得:
N
由式(7)可知,作用在竖向纵梁上的轴力沿着梁长方向亦是递增或者递减的。同时,每根竖向纵梁间的轴力差值为:
相邻两个单元水平横梁上的轴向应变ε的差值Δε为:
其中,k=1,2,…,n-1。由于夹角θ∈(0°,90°),则有:
根据式(8),则有:
Δε
从式(11)可以看出,Δε是ε的一阶导数,且水平横梁上轴应变分布是关于其长度的分布函数。根据数值分析理论,则有差值Δε′如下:
Δε′
其中,m=1,2,…,n-1;j=1,2,…,n-2。
进一步,由式(12)可得:
Δε′
在工程实际中,由于两个相邻的θ
从上式可以看出,ε是关于水平横梁(锚具长度)长度l的3次函数,即:
ε(x)
故当锚筒受轴向拉力时,其应变梯度函数是沿其长度方向的三次函数。
步骤2,根据海森矩阵法对应变梯度分布函数求极值点,极值点即为CFRP传感器51的布置点。
且每个传感器布置点的间距满足:
其中,L(x)
步骤3,通过理论推导,构建传感器与被监测结构之间的界面应力分布函数,根据传感器测点的应变大小,优化传感器的布置尺寸。
下式中:cg为CFRP传感器;mt为锚筒;jc为胶层。
CFRP传感器拉应力与剪应力平衡可得:
dσ
CFRP传感器拉应力与外力平衡可得:
dF
其中,b
对于CFRP传感器与待测锚筒之间的胶层,其粘结剪应变为:
其中,u,v分别为胶层某点的横向与纵向位移。
根据材料力学可知:
其中,G
由上式(17),(20)可得:
对上式(21)求导可得:
根据前述假设③,胶层只发生横向剪切变形,忽略其平面上的弯曲刚度,因此v≈0,因此式(22)可以简化为:
同时,再根据前述假设③,胶层水平位移沿厚度方向呈线性分布,则有:
其中,u
将上式(24)代入上式(23),则有:
式中,
其中,E
对于锚筒任意截面,有:
F
其中,b
对于系统的整个截面,有:
F
将上式(26),(27),代入式(25)可得:
则,上式(28)通解为:
式中,
对于单个满贴的CFRP传感器,以尾端的自由算端为坐标原点,向首端的加载端方向为x轴的正方向,边界条件为:
根据边界条件,式(13)中通解系数为:
由上式(17),(31)可得:
故锚筒任一点的正应力与该处剪应力,以及传感器长度的关系依此确定。
通过上述步骤的理论推导,构建出基于分布式传感理念的传感器布点方式。为后期工程实践提供理论支撑。
更优选的,为了减少传感器的使用量,选取应力阈值对锚具进行分区;具体地,通过分析有限元模拟锚具受力后的应力分布,基于分布式传感理念,根据应力数值的大小,将其分成高应力区,中应力区与低应力区。弧锥型锚具构造的优化设计,将锚具张拉端的应力集中转移到了自由端,且工程经验与有限元仿真表明损伤大多发生在高、中应力区。所以可以仅在高应力、中应力区内根据海森矩阵法对应变梯度分布函数求极值点,获取传感器布置点。结合附图3所示,自锚具的自由端34至张拉端35,依次为高应力区32、中应力区33、低应力区31。
更优选的,本发明中所采用的CFRP传感器主要包括CFRP筋、铜电极和导线。CFRP传感器的制备方法为:将CFRP筋两端断面切割整齐,用砂纸打磨平整后再用酒精清除断面残屑。用导电胶将铜电极黏贴在筋材端部截面,再用焊锡将导线焊在铜电极上,完成CFRP传感器的制备。在CFRP传感器的端部施加均匀压力后养护24h,待导电胶固化。最后在CFRP传感器的两端均匀涂抹环氧胶,待固化完成后形成较好的电极保护。
在实际检测过程中,通过本方法快速确定锚具轴向上所有传感器布置点以及每个布置点处CFRP传感器的长度,就可以快速完成锚具轴向CFRP传感器的嵌贴工作。
更优选的,关于CFRP传感器在锚具上的安装方式:在锚筒内壁沿轴向开设用于CFRP传感器安装的嵌槽,CFRP传感器组安装在嵌槽内;在靠近锚具定位板处,开设导线引孔,每个CFRP传感器的导线都从导线引孔引出与数据采集器连接。
以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的科研及工程技术人员能够了解本发明的内容并据以实施。本发明的保护范围不限于上述实施例,因此凡依据本发明所揭示的理论、技术及方法所作的等同变化或修饰,均在本发明的保护范围之内。
- 一种适用于深埋的深埋式锚具组件及其安装施工方法
- 适用于结构健康监测的传感器布设方法及结构识别方法
- 适用于结构健康监测的传感器布设方法及结构识别方法