一种基于室内环境感测的机器人
文献发布时间:2023-06-19 10:14:56
技术领域
本发明涉及机器人领域,具体是一种基于室内环境感测的机器人。
背景技术
机器人是一种能够半自主或全自主工作的智能机器,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围,机器人按照用途可划分为:工业机器人,服务机器人、特种机器人和家用机器人等。
现有技术中的室内家用机器人,其自身功能通常较为单一,通常在执行工作时需要主人手动设置才能进行,机器人自身不具备感测周围环境进行自主工作的功能,实用性能和智能程度较低。
发明内容
本发明的目的在于提供一种基于室内环境感测的机器人,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种基于室内环境感测的机器人,包括机器人主体,所述机器人主体的顶部转动连接有机器人头部,所述机器人头部的外表面设置有触摸显示屏,所述机器人头部的内部设置有智能芯片,所述机器人头部的外表面设置有监控摄像头,所述机器人主体的内壁固定连接有电机箱,所述电机箱的内部设置有电机,所述电机的输出端固定连接有转轴,所述转轴的一端固定连接有清扫盘,所述清扫盘的底部固定连接有清洁刷,所述机器人主体的内底壁固定连接有吸尘器,所述吸尘器的一侧固定连接有管道,所述管道远离吸尘器的一端固定连接有吸尘头。
作为本发明进一步的方案:所述机器人主体的底部固定连接有行走轮,所述行走轮的数量为四个,四个所述行走轮以矩形阵列的形式固定连接有在机器人主体的底部,通过设置行走轮,便于该机器人进行灵活移动。
作为本发明再进一步的方案:所述机器人主体的内壁固定连接有支撑板,所述支撑板的顶部固定连接有固定连接有安装座,所述安装座的顶部固定连接有蓄电池,通过设置安装座,安装座起到固定蓄电池的作用。
作为本发明再进一步的方案:所述机器人主体的外表面设置有太阳能电池板,所述太阳能电池板的一侧固定连接有导线,所述导线与蓄电池电性连接,通过设置智能芯片、行走轮、蓄电池和太阳能电池板,在机器人自身电量较低时,智能芯片控制机器人主体的行走轮进行移动,在移动至阳台后,太阳能电池板可以通过吸收太阳光,将光能转化为电能储存至蓄电池的内部,该设计最大程度的节省对用电的损耗,只要有太阳光就可利用太阳能电池板对机器人主体进行电量的补充。
作为本发明再进一步的方案:所述机器人主体的一侧设置有充电插口,所述机器人主体的外表面固定连接有扶手,通过设置充电插口,便于及时对机器人进行充电。
作为本发明再进一步的方案:所述机器人主体的外表面设置有空气检测器,所述机器人主体的内壁固定连接有分隔板,所述分隔板的顶部固定连接有加湿器,所述加湿器的输出端固定连接有连接管,通过设置空气检测器、加湿器、连接管、挡板和气孔,在空气检测器检测到室内空气的湿度较低时,可以通过智能芯片对加湿器下达启动指令,加湿器在工作时将湿气从连接管送出,最后由挡板上的气孔排出至机器人主体外部,对周围环境进行湿润。
作为本发明再进一步的方案:所述连接管的一端固定连接有挡板,所述挡板的外表面开设有气孔,所述气孔的数量为若干个,挡板的起到连接机器人主体与连接管的作用,挡板上的气孔可确保加湿器产生的湿气可顺利排出机器人主体外部。
作为本发明再进一步的方案:所述加湿器的一侧固定连接有补水管,所述机器人主体的外表面开设有注水孔,所述注水孔的外表面设置有密封板,所述补水管与注水孔固定连接,通过设置补水管、注水孔和密封板,便于向加湿器中补充储水。
作为本发明再进一步的方案:所述机器人主体的外表面设置有活动门,所述活动门的外表面固定连接有把手,通过设置活动门和把手,方便对机器人主体内吸尘器吸入的废屑进行清理。
作为本发明再进一步的方案:所述机器人主体的外表面设置有扬声器,所述机器人主体的外表面开设有散热孔,通过设置散热孔,有效增强了该机器人主体的散热性。
与现有技术相比,本发明的有益效果是:
1、本发明中,通过设置智能芯片、监控摄像头、清扫盘、清洁刷和吸尘器,该机器人在使用时,通过监控摄像头可以将室内地面的干净程度,通过画面形式传输给机器人内部的智能芯片,由智能芯片进行判断是否执行清洁地面的指令,在判定结果为需要清洁时,智能芯片控制电机和吸尘器进行工作,机器人主体底部的两个清洁刷进行旋转,配合吸尘器的吸尘头,将地面的污渍和灰尘吸入吸尘器内的垃圾箱进行储存,清洁过程中监控摄像头将捕捉到的地面画面持续传递给智能芯片,在室内地面全部完成清洁后,智能芯片控制电机和吸尘器进行关闭,即完成整个清洁流程,该设计有效提高了机器人的智能化程度,使机器人自身可以感测室内环境从而自主完成工作,无需主人提前设定指令。
2、本发明中,通过设置智能芯片、行走轮、蓄电池和太阳能电池板,在机器人自身电量较低时,智能芯片控制机器人主体的行走轮进行移动,在移动至阳台后,太阳能电池板可以通过吸收太阳光,将光能转化为电能储存至蓄电池的内部,该设计最大程度的节省对用电的损耗,只要有太阳光就可利用太阳能电池板对机器人主体进行电量的补充。
3、本发明中,通过设置空气检测器、加湿器、连接管、挡板和气孔,在空气检测器检测到室内空气的湿度较低时,可以通过智能芯片对加湿器下达启动指令,加湿器在工作时将湿气从连接管送出,最后由挡板上的气孔排出至机器人主体外部,对周围环境进行湿润。
附图说明
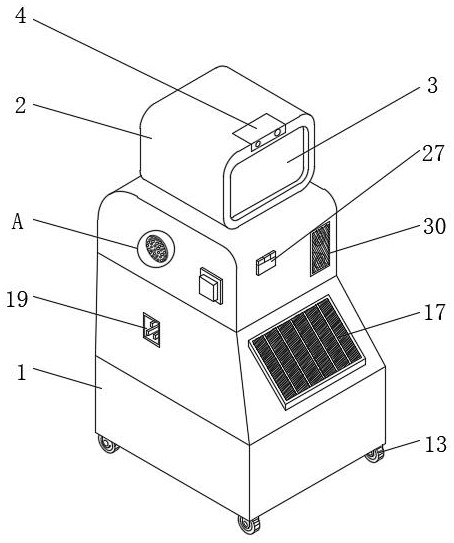
图1为本发明的结构示意图;
图2为本发明的侧视结构示意图;
图3为本发明的侧视剖面结构示意图;
图4为本发明的正视结构示意图;
图5为本发明的后视结构示意图;
图6为本发明图1中A处放大结构示意图。
图中:1、机器人主体;2、机器人头部;3、触摸显示屏;4、监控摄像头;5、电机箱;6、电机;7、转轴;8、清扫盘;9、清洁刷;10、吸尘器;11、管道;12、吸尘头;13、行走轮;14、支撑板;15、安装座;16、蓄电池;17、太阳能电池板;18、导线;19、充电插口;20、扶手;21、分隔板;22、加湿器;23、连接管;24、挡板;25、气孔;26、补水管;27、密封板;28、活动门;29、把手;30、扬声器;31、散热孔。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1~6,本发明实施例中,一种基于室内环境感测的机器人,包括机器人主体1,机器人主体1的顶部转动连接有机器人头部2,机器人头部2的外表面设置有触摸显示屏3,机器人头部2的内部设置有智能芯片,机器人头部2的外表面设置有监控摄像头4,机器人主体1的内壁固定连接有电机箱5,电机箱5的内部设置有电机6,电机6的输出端固定连接有转轴7,转轴7的一端固定连接有清扫盘8,清扫盘8的底部固定连接有清洁刷9,机器人主体1的内底壁固定连接有吸尘器10,吸尘器10的一侧固定连接有管道11,管道11远离吸尘器10的一端固定连接有吸尘头12,通过设置智能芯片、监控摄像头4、清扫盘8、清洁刷9和吸尘器10,该机器人在使用时,通过监控摄像头4可以将室内地面的干净程度,通过画面形式传输给机器人内部的智能芯片,由智能芯片进行判断是否执行清洁地面的指令,在判定结果为需要清洁时,智能芯片控制电机6和吸尘器10进行工作,机器人主体1底部的两个清洁刷9进行旋转,配合吸尘器10的吸尘头12,将地面的污渍和灰尘吸入吸尘器10内的垃圾箱进行储存,清洁过程中监控摄像头4将捕捉到的地面画面持续传递给智能芯片,在室内地面全部完成清洁后,智能芯片控制电机6和吸尘器10进行关闭,即完成整个清洁流程,该设计有效提高了机器人的智能化程度,使机器人自身可以感测室内环境从而自主完成工作,无需主人提前设定指令。
其中,机器人主体1的底部固定连接有行走轮13,行走轮13的数量为四个,四个行走轮13以矩形阵列的形式固定连接有在机器人主体1的底部,通过设置行走轮13,便于该机器人进行灵活移动;机器人主体1的内壁固定连接有支撑板14,支撑板14的顶部固定连接有固定连接有安装座15,安装座15的顶部固定连接有蓄电池16,通过设置安装座15,安装座15起到固定蓄电池16的作用;机器人主体1的外表面设置有太阳能电池板17,太阳能电池板17的一侧固定连接有导线18,导线18与蓄电池16电性连接,通过设置智能芯片、行走轮13、蓄电池16和太阳能电池板17,在机器人自身电量较低时,智能芯片控制机器人主体1的行走轮13进行移动,在移动至阳台后,太阳能电池板17可以通过吸收太阳光,将光能转化为电能储存至蓄电池16的内部,该设计最大程度的节省对用电的损耗,只要有太阳光就可利用太阳能电池板对机器人主体1进行电量的补充;机器人主体1的一侧设置有充电插口19,机器人主体1的外表面固定连接有扶手20,通过设置充电插口19,便于及时对机器人进行充电。
其中,机器人主体1的外表面设置有空气检测器,机器人主体1的内壁固定连接有分隔板21,分隔板21的顶部固定连接有加湿器22,加湿器22的输出端固定连接有连接管23,通过设置空气检测器、加湿器22、连接管23、挡板24和气孔25,在空气检测器检测到室内空气的湿度较低时,可以通过智能芯片对加湿器22下达启动指令,加湿器22在工作时将湿气从连接管23送出,最后由挡板24上的气孔25排出至机器人主体1外部,对周围环境进行湿润;连接管23的一端固定连接有挡板24,挡板24的外表面开设有气孔25,气孔25的数量为若干个,挡板24的起到连接机器人主体1与连接管23的作用,挡板24上的气孔25可确保加湿器22产生的湿气可顺利排出机器人主体1外部;加湿器22的一侧固定连接有补水管26,机器人主体1的外表面开设有注水孔,注水孔的外表面设置有密封板27,补水管26与注水孔固定连接,通过设置补水管26、注水孔和密封板27,便于向加湿器22中补充储水;机器人主体1的外表面设置有活动门28,活动门28的外表面固定连接有把手29,通过设置活动门28和把手29,方便对机器人主体1内吸尘器10吸入的废屑进行清理;机器人主体1的外表面设置有扬声器30,机器人主体1的外表面开设有散热孔31,通过设置散热孔31,有效增强了该机器人主体1的散热性。
本发明的工作原理是:通过设置智能芯片、监控摄像头4、清扫盘8、清洁刷9和吸尘器10,该机器人在使用时,通过监控摄像头4可以将室内地面的干净程度,通过画面形式传输给机器人内部的智能芯片,由智能芯片进行判断是否执行清洁地面的指令,在判定结果为需要清洁时,智能芯片控制电机6和吸尘器10进行工作,机器人主体1底部的两个清洁刷9进行旋转,配合吸尘器10的吸尘头12,将地面的污渍和灰尘吸入吸尘器10内的垃圾箱进行储存,清洁过程中监控摄像头4将捕捉到的地面画面持续传递给智能芯片,在室内地面全部完成清洁后,智能芯片控制电机6和吸尘器10进行关闭,即完成整个清洁流程,该设计有效提高了机器人的智能化程度,使机器人自身可以感测室内环境从而自主完成工作,无需主人提前设定指令,通过设置智能芯片、行走轮13、蓄电池16和太阳能电池板17,在机器人自身电量较低时,智能芯片控制机器人主体1的行走轮13进行移动,在移动至阳台后,太阳能电池板17可以通过吸收太阳光,将光能转化为电能储存至蓄电池16的内部,该设计最大程度的节省对用电的损耗,只要有太阳光就可利用太阳能电池板对机器人主体1进行电量的补充,通过设置空气检测器、加湿器22、连接管23、挡板24和气孔25,在空气检测器检测到室内空气的湿度较低时,可以通过智能芯片对加湿器22下达启动指令,加湿器22在工作时将湿气从连接管23送出,最后由挡板24上的气孔25排出至机器人主体1外部,对周围环境进行湿润。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种基于室内环境感测的机器人
- 一种基于室内环境感测的智能机器人