一种擒纵叉组装机
文献发布时间:2023-06-19 10:33:45
技术领域
本发明涉及设备领域,特别涉及一种擒纵叉组装机。
背景技术
擒纵叉是机械表的心脏,擒纵轮带动擒纵叉一擒一纵,完成锁接、压冲、释放的动作,将动力传输给百伦,由摆轮完成时间的分配,达到调速的作用,可以说机械表的准确与擒纵叉有最大的关联,现有技术中的擒纵叉组装时,需要人工放置在固定的位置并冲压,由于擒纵叉体积较小,人工放置时位置容易偏移,冲压产品损坏较多,人工放置时费时,冲压产品损坏率高,产品加工效率低。
故需要提供一种擒纵叉组装机来解决上述技术问题。
发明内容
本发明提供一种擒纵叉组装机,解决现有技术中的擒纵叉组装时,需要人工放置在固定的位置并冲压,由于擒纵叉体积较小,人工放置时位置容易偏移,冲压产品损坏较多,人工放置时费时,冲压产品损坏率高,产品加工效率低的问题。
为解决上述技术问题,本发明的技术方案为:一种擒纵叉组装机,包括第一导轨、固定座、吸取装置、以及顶出装置,所述第一导轨位于所述吸取装置和所述顶出装置之间,所述固定座位于所述第一导轨上,所述固定座沿所述第一导轨的长度方向移动;
所述吸取装置依次包括用于吸取叉身的第一机械手、吸取第一叉瓦的第二机械手、吸取第二叉瓦的第三机械手、吸取胶的第四机械手、以及吸取叉轴的第五机械手;
所述顶出装置包括第一出瓦机构和第二出瓦机构,所述第一出瓦机构位于所述第二机械手和所述第三机械手之间,所述第二出瓦机构位于所述第三机械手和所述第四机械手之间,所述第一出瓦机构用于将第一叉瓦顶出与叉身贴合,所述第二出瓦机构用于将第二叉瓦顶出与叉身贴合。
本发明中,所述第一机械手、所述第二机械手、所述第三机械手、所述第五机械手分别包括第一电机、第二电机、第一连接板、第一固定板、第一丝杠、第一吸杆、相对设置的第一限位板、以及相对设置的第一支撑板,所述第一限位板分别位于所述第一连接板的两端,所述第一连接板的两端分别连接在所述第一支撑板上,所述第一丝杠连接在所述第一限位板内,所述第一电机位于所述第一限位板外侧,且与所述第一丝杠连接,所述第一固定板连接在所述第一丝杠上,所述第二电机位于所述第一固定板上方,所述第一吸杆连接在所述第一固定板上,所述第一电机用于驱动所述第一固定板移动,所述第二电机用于驱动所述第一吸杆移动;
所述第一机械手、所述第二机械手、所述第三机械手、所述第五机械手还分别包括第三电机、第二连接板、第二丝杠、放料台、同步带、同步轮、以及相对设置的第二限位板,所述第二连接板位于所述第一吸杆的下方,所述第二限位板位于所述第二连接板的两端,所述第二丝杠连接在所述第二限位板上,所述放料台连接在所述第二丝杠上,所述第三电机位于所述第二限位板内侧,且位于所述第二丝杠的一侧,所述同步轮位于所述第二限位板外侧、且与所述第二丝杠连接,所述第三电机与所述同步轮位于所述同步带的两端。
本发明中,所述第一机械手、所述第二机械手、所述第三机械手、所述第五机械手还设置有第二导轨,所述第二导轨连接在所述第二连接板靠近所述第二丝杠的一侧,所述放料台的底部连接在所述第二导轨上。
本发明中,所述第四机械手包括第四电机、第五电机、第三连接板、第二固定板、第三丝杠、第二吸杆、盛胶盒、相对设置的第三限位板、以及相对设置的第二支撑板,所述第三限位板位于所述第三连接板的两端,所述第三连接板的两端分别连接在所述第二支撑板上,所述第三丝杠连接在所述第三限位板内,所述第四电机位于所述第三连接板的一侧,且与所述第三丝杠连接,所述第二固定板连接在所述第三丝杠上,所述第五电机连接在所述第二固定板的上方,所述第二吸杆连接在所述第二固定板上,所述盛胶盒位于所述第二吸杆的下方,所述第四电机用于驱动所述第二固定板移动,所述第五电机用于驱动第二吸杆移动。
本发明中,所述第五机械手还包括顶出杆,所述顶出杆位于所述第五机械手的第一吸杆内,所述第五机械手通过所述顶出杆将所述叉轴和叉身固定连接。
本发明中,所述第一出瓦机构和所述第二出瓦机构分别包括固定台、第四连接板、第六电机、第四丝杠、固定杆、第一连接座、以及相对设置的第四限位板,所述第四连接板连接在所述固定台上,所述第四限位板连接在所述第四连接板的两端,所述第四丝杆连接在所述第四限位板内,所述第六电机连接在所述第四限位板外侧,且与所述第四丝杠连接,所述第一连接座连接在所述第四丝杠上,所述固定杆一端连接在所述第一连接座上,另一端伸出所述第四限位板外侧。
本发明中,所述第一出瓦机构和所述第二出瓦机构还包括第三导轨,所述第三导轨连接在所述第四连接板靠近所述第四限位板的一侧,所述第一连接座与所述第三导轨滑动连接。
本发明中,所述擒纵叉组装机还包括下料机械手,所述下料机械手位于所述顶出装置的一侧。
本发明中,所述擒纵叉组装机还包括机台,所述第一导轨、所述吸取装置以及所述顶出装置均位于所述机台上;
所述机台的底部还设置有多个滑轮。
本发明相较于现有技术,其有益效果为:本发明的擒纵叉组装机,其通过第一导轨位于吸取装置和顶出装置之间,固定座位于第一导轨上,下料机械手位于顶出装置一侧、且位于顶出装置的下侧,吸取装置依次包括第一机械手、第二机械手、第三机械手、第四机械手以及第五机械手,顶出装置依次包括第一出瓦机构和第二出瓦机构,第一机械手将叉身抓取放在固定座上,固定座沿导轨移动至第二机械手一侧,第二机械手抓取第一叉瓦放置在叉身一侧上,固定座移动至第一出瓦机构一侧,第一出瓦机构将第一叉瓦向叉身方向顶出且与叉身贴合,固定座移动至第三机械手一侧,第三机械手抓取第二叉瓦放置在叉身一侧,固定座移动至第二出瓦机构一侧,第二出瓦机构将第二叉瓦向叉身方向顶出且与叉身贴合,固定座移动至第四机械手一侧,第四机械手吸取胶分别将第一叉瓦和第二叉瓦与叉身固定,固定座移动至第五机械手一侧,第五机械手吸取叉轴放置在叉轴上、且第五机械手的顶出杆顶出将叉轴与车身贴合,固定座移动至下料机械手一侧,下料机械手抓取组装后的叉身和叉轴带离固定座,节省了人工放置冲压,减少了产品的损坏率,加工效率提高。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面对实施例中所需要使用的附图作简单的介绍,下面描述中的附图仅为本发明的部分实施例相应的附图。
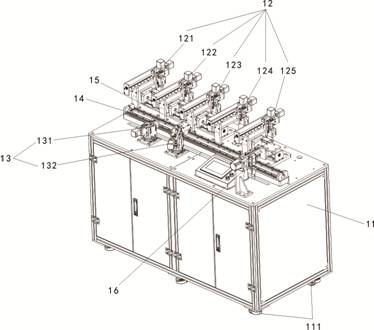
图1为本发明的擒纵叉组装机的优选实施例的立体图。
图2为本发明的擒纵叉组装机的第一机械手的主视图。
图3为本发明的擒纵叉组装机的第一机械手的立体图。
图4为本发明的擒纵叉组装机的第四机械手的立体图。
图5为本发明的擒纵叉组装机的第一出瓦机构的立体图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
现有技术中的擒纵叉组装时,需要人工放置在固定的位置并冲压,由于擒纵叉体积较小,人工放置时位置容易偏移,冲压产品损坏较多,人工放置时费时,冲压产品损坏率高,产品加工效率低。
如下为本发明提供的一种能解决以上技术问题的擒纵叉组装机的优选实施例。
请参照图1、图2和图4,其中图1为本发明的擒纵叉组装机的优选实施例的立体图,图2为本发明的擒纵叉组装机的第一机械手的主视图,图4为本发明的擒纵叉组装机的第四机械手的立体图。
在图中,结构相似的单元是以相同标号表示。
本发明术语中的“第一”“第二”等词仅作为描述目的,而不能理解为指示或暗示相对的重要性,以及不作为对先后顺序的限制。
本发明提供的一种擒纵叉组装机,包括第一导轨14、固定座15、吸取装置12、以及顶出装置13,第一导轨14位于吸取装置12和顶出装置13之间,固定座15位于第一导轨14上,固定座15沿第一导轨14的长度方向移动,吸取装置12依次包括用于吸取叉身的第一机械手121、吸取第一叉瓦的第二机械手122、吸取第二叉瓦的第三机械手123、吸取胶的第四机械手124、以及吸取叉轴的第五机械手125,顶出装置13包括第一出瓦机构131和第二出瓦机构132,第一出瓦机构131位于第二机械手122和第三机械手123之间,第二出瓦机构132位于第三机械手123和第四机械手124之间,第一出瓦机构131用于将第一叉瓦顶出与叉身贴合,第二出瓦机构132用于将第二叉瓦顶出与叉身贴合。
第一机械手121、第二机械手122、第三机械手123、第五机械手125分别包括第一电机20、第二电机21、第一连接板22、第一固定板33、第一丝杠23、第一吸杆28、相对设置的第一限位板24、以及相对设置的第一支撑板25,第一限位板24分别位于第一连接板22的两端,第一连接板22的两端分别连接在第一支撑板25上,第一丝杠23连接在第一限位板24上,第一电机20位于第一限位板24外侧,且与第一丝杠23连接,第一固定板33连接在第一丝杠23上,第二电机21位于第一固定板33上方,第一吸杆28连接在第一固定板33上,第一电机20用于驱动第一固定板33移动,第二电机21用于驱动第一吸杆28移动,第一支撑板25用于支撑第一连接板22,第一丝杠23通过第一限位板24连接在第一连接板22上,第一电机20位于第一连接板22的一侧、且第一电机20与丝杠连接,第一电机20用于驱动第一丝杠23转动,第一固定板33连接在第一丝杠23上,第一电机20驱动第一丝杠23转动时,第一丝杠23带动第一固定板33移动,第二电机21位于固定板的上方,第一吸杆28连接在固定板上,第二电机21用于驱动第一吸杆28上下移动,方便第一吸杆28吸或放置零部件。
其中,第一导轨14位于吸取装置12和顶出装置13之间,固定座15位于第一导轨14上,吸取装置12依次包括抓取第一机械手121、第二机械手122、第三机械手123、第四机械手124以及第五机械手125,顶出装置13包括第一出瓦机构131和第二出瓦机构132,固定座15沿第一导轨14的长度方向移动,第一机械手121用于将叉身放置在固定座15上,第二机械手122用于将第一叉瓦放置在叉身的一侧,第一出瓦机构131用于将第一叉瓦顶出与叉身贴合,第三机械手123用于将第二叉瓦放置在叉身的一侧,第二出瓦机构132用于将第二叉瓦顶出与叉身贴合,第四机械手124吸取胶用于将第一叉瓦和第二叉瓦与叉身固定,第五机械手125用于将叉轴放置在叉身上,从而代替了人工放置叉身和叉瓦,放料位置准确,减少报废率,提高了产品的加工效率。
本实施例中,第一机械手121、第二机械手122、第三机械手123、第五机械手125还分别包括第二连接座30,第二连接座30在固定板上,第一吸杆28连接在第二连接座30上,第二电机21通过驱动第二连接座30带动第一吸杆28上下移动。
请参照图3,图3为本发明的擒纵叉组装机的第一机械手的立体图,第一机械手121、第二机械手122、第三机械手123、第五机械手125还分别包括第三电机27、第二连接板、第二丝杠、放料台26、同步带32、同步轮31、以及相对设置的第二限位板29,第二连接板位于第一吸杆28的下方,第二限位板29位于第二连接板的两端,第二丝杠连接在第二限位板29上,放料台26连接在第二丝杠上,第三电机27位于第二限位板29内侧,且位于第二丝杠的一侧,同步轮31位于第二限位板29外侧、且与第二丝杠连接,第三电机27与同步轮31位于同步带32的两端,第二限位板29连接在第二连接板的两端,第二丝杠通过第二限位板29连接在第二连接板上,第二限位板29用于支撑第二丝杠,第三电机27连接在第二限位板29靠近丝杠的一侧,同步轮31连接在第二限位板29远离第二丝杠的一侧、且同步轮31与第二丝杠固定连接,第三电机27和同步轮31位于同步带32的两端,放料台26连接在第二丝杠上,第三电机27通过同步带32驱动同步轮31转动,同步轮31带动第二丝杠转动,第二丝杠带动放料台26移动,从而方便第一吸杆28吸取不同位置的零部件。
第一机械手121、第二机械手122、第三机械手123、第五机械手125还设置有第二导轨,第二导轨连接在第二连接板靠近第二丝杠的一侧,放料台26的底部连接在第二导轨上,第二导轨用于限位放料台26,防止放料台26在移动时偏离位置从而导致第一吸杆28吸取不到零部件。
请参照图4,第四机械手124包括第四电机41、第五电机42、第三连接板45、第二固定板49、第三丝杠43、第二吸杆47、盛胶盒48、相对设置的第三限位板44、以及相对设置的第二支撑板46,第三限位板44位于第三连接板45的两端,第三连接板45的两端分别连接在第二支撑板46上,第三丝杠43连接在第三限位板44内,第四电机41位于第三连接板45的一侧,且与第三丝杠43连接,第二固定板49连接在第三丝杠43上,第五电机42连接在第二固定板49的上方,第二吸杆47连接在第二固定板49上,盛胶盒48位于第二吸杆47的下方,第四电机41用于驱动第二固定板49移动,第五电机42用于驱动第二吸杆47移动,第二支撑板46用于支撑第三连接板45,第三丝杠43通过第三限位板44连接在第三连接板45上,第四电机41位于第三连接板45的一侧、且与第三丝杠43连接,第二固定板49连接在第三连接板45一侧,第四电机41通过驱动第三丝杠43带动第二固定板49移动,第五电机42连接在第二固定板49上方,第二吸杆47连接在第二固定板49上,第五电机42用于驱动第二吸杆47上下移动,方便第二吸杆47吸胶和将胶放在产品上,第五机械手125还包括顶出杆,顶出杆位于第五机械手125的第一吸杆28内,第五机械手125通过顶出杆将车轴和叉身固定连接。
请参照图5,图5为本发明的擒纵叉组装机的第一出瓦机构的立体图,第一出瓦机构131和第二出瓦机构132分别包括固定台57、第四连接板52、第六电机51、第四丝杠54、固定杆55、第一连接座56、以及相对设置的第四限位板53,第四连接板52连接在固定台57上,第四限位板53连接在第四连接板52的两端,第四丝杠54连接在第四限位板53内,第六电机51连接在第四限位板53外侧,且与第四丝杠54连接,第一连接座56连接在第四丝杠54上,固定杆55的一端连接在第一连接座56上,另一端伸出第四限位板53外侧,固定台57用于支撑和固定第四连接板52,第四丝杠54通过第四限位板53连接在第四连接板52上,第一连接座56连接在第四丝杠54上,第六电机51连接在第四限位板53的一侧且与第四丝杠54连接,固定杆55穿过第四限位板53连接在第一连接座56上,第六电机51驱动第四丝杠54带动第一连接座56移送,第一移动做带动固定杆55移动。
第一出瓦机构131和第二出瓦机构132还包括第三导轨58,第三导轨58连接在第四连接板52靠近第四限位板53的一侧,第一连接座56与第三导轨58滑动连接,第一连接座56通过第三导轨58连接在第四连接板52上,第三导轨58用于限位和稳定第一连接座56,防止第一连接座56在移动时晃动从而导致无法精准顶出第一叉瓦或第二叉瓦。
擒纵叉组装机还包括下料机械手16,下料机械手16位于顶出装置13的一侧,擒纵叉组装机还包括机台11,第一导轨14、吸取装置12以及顶出装置13均位于机台11上,机台11的底部还设置有多个滑轮111,下料机械手16用于将组合好的叉身、第一叉瓦和第二叉瓦带离固定座15上,方便固定座15进行下一步操作,机台11用于固定和提高第一导轨14、吸取装置12以及顶出装置13的高度,方便人工操作,滑轮111用于方便推动机台11,节省力气。
工作原理:
第一导轨14位于吸取装置12和顶出装置13之间,固定座15位于第一导轨14上,固定座15沿第一导轨14的长度方向移动,下料机械手16位于顶出装置13的一侧、且位于吸取装置12的下方,方便抓取组装好以后的产品,吸取装置12依次包括第一机械手121、第二机械手122、第三机械手123、第四机械手124以及第五机械手125,第一机械手121用于抓取叉身,第二机械手122用于抓取第一叉瓦,第三机械手123用于抓取第二叉瓦,第四机械手124用于吸取胶,第五机械手125用于抓取叉轴,顶出装置13包括第一出瓦机构131和第二出瓦机构132,第一出瓦机构131位于第二机械手122和第三机械手123之间,第二出瓦机构132位于第三机械手123和第四机械手124之间、且位于第一出瓦机构131和下料机械手16之间。
第一机械手121、第二机械手122、第三机械手123、第五机械手125的第一连接板22位于第一支撑板25上,第一限位板24位于第一连接板22的两端,第一丝杠23通过第一限位板24连接在第一连接板22上,第一电机20位于第一连接板22的一侧且与第一丝杠23连接,第一固定板33连接在第一丝杠23上,第一电机20通过第一丝杠23驱动第一固定板33移动,第二电机21位于第一丝杠23的上方,第二电机21通过第二连接座30与第一吸杆28连接,第二电机21通过第二连接座30驱动第一吸杆28上下移动。
第二限位板29位于第二连接板的两端,第二丝杠通过第二限位板29连接在第二连接板上,放料台26连接在第二丝杠上,第三电机27和同步轮31固定在第二限位板29上,第三电机27和同步轮31通过同步带32驱动连接,第三电机27通过同步带32带动同步轮31转动,同步轮31带动第二丝杠转动,第二丝杠带动放料台26移动。
第四机械手124的第三连接板45位于第二支撑板46上,第三限位板44位于第三连接板45的两端,第三丝杠43通过第三限位板44连接在第三连接板45上,第二固定板49连接在第三丝杠43上,第四电机41连接在第三限位板44的一侧、且与第三丝杠43连接,第四电机41用于驱动第三丝杠43转动,第三丝杠43带动第二固定板49移动,第五电机42位于第二固定板49的上方,第二吸杆47连接在第二固定板49上,第五电机42用于驱动第二吸杆47上下运动,方便吸胶和放胶。
第一出瓦机构131和第二出瓦机构132的第四连接板52连接在固定台57上,第四限位板53连接在第四连接板52的两端,第四丝杠54通过第四限位板53连接在第四连接板52上,第一连接座56连接第四丝杠54上,第六电机51位于第四限位板53的一侧,固定杆55穿过第四限位板53连接在第一连接座56上,第六电机51通过第四丝杠54带动第一连接座56移动,第一连接座56带动固定杆55移动。
当组装时,固定座15沿第一导轨14移动至第一机械手121的一侧,第一机械手121的第二电机21驱动第二连接座30下移吸取叉身,第一吸杆28吸取叉身后,第二电机21驱动第二连接座30上升,第一电机20通过驱动第一丝杠23转动,第一电机20带动第一固定板33移动,当第一吸杆28位于固定座15上方时,第二电机21驱动第一吸杆28下降,将叉身放置在固定座15上,固定座15沿第一导轨14移动至第二机械手122一侧,第二机械手122的第二电机21驱动第一连接座56下移吸取叉身,当第一吸杆28吸取第一叉瓦后,第二电机21驱动第一吸杆28上升,第一电机20驱动第一丝杠23转动,第一丝杠23带动第一固定板33移动,当第一吸杆28位于固定座15上方时,第二电机21驱动第一吸杆28下降,将第一叉瓦放置在叉身的一侧。
固定座15沿第一导轨14移动至第一出瓦机构131的一侧,第一出瓦机构131的第六电机51驱动第四丝杠54转动,第四丝杠54带动第一连接座56移动,第一连接座56带动固定杆55移动,固定杆55将第一叉瓦向叉身方向移动,叉身形变与第一叉瓦贴合,固定座15沿第一导轨14移动至第三机械手123的一侧,第三机械手123的第二电机21驱动第二连接座30下移吸取第二叉瓦,当第一吸杆28吸取第二叉瓦上升后,第一电机20驱动第一丝杠23带动第一固定板33移动至固定座15的上方,第一电机20驱动第一连接座56下降,第一连接座56带动第一吸杆28下降,将第二叉瓦放置在固定座15上。
进一步的,固定座15沿第一导轨14移动至第二出瓦机构132的一侧,第二出瓦机构132的第六电机51驱动第四丝杠54转动,第四丝杠54带动第一连接座56移动,第一连接座56带动固定杆55移动,固定杆55将第二叉瓦向叉身方向移动,叉身形变与第二叉瓦贴合,固定座15沿第一导轨14移动至第四机械手124的一侧,第四机械手124的第五电机42驱动第二吸杆47下降,第二吸杆47吸取盛胶盒48内的胶,当第二吸杆47吸取胶后,第五电机42驱动第二吸杆47上升,第四电机41驱动第三丝杠43转动,第三丝杠43带动第二固定板49移动,当第二吸杆47位于固定座15上方时,第五电机42驱动第二吸杆47下降点胶,将第一叉瓦和第二叉瓦与叉身固定。
进一步的,固定座15沿第一导轨14移动至第五机械手125的一侧,第五机械手125的第二电机21驱动第一连接座56下移吸取叉轴,当第一吸杆28吸取叉轴后,第二电机21驱动第一吸杆28上升,第一电机20驱动第一丝杠23转动,第一丝杠23带动第一固定板33移动,当第一吸杆28位于固定座15上方时,第二电机21驱动第一吸杆28下降,将叉轴放置在叉身上,第二电机21内的顶出杆顶出,将叉轴和叉身挤压固定。
进一步的,当将叉轴和叉身固定后,固定座15沿第一导轨14移动到下料机械手16的一侧,下料机械手16吸取组装后的叉身带离固定座15,固定座15通过第一导轨14移动至第一机械手121的一侧,继续放置叉身组装,省去了人工放置零件,减小了产品的损坏率,提高了加工的效率。
本优选实施例的擒纵叉组装机通过第一导轨位于吸取装置和顶出装置之间,固定座位于第一导轨上,下料机械手位于顶出装置一侧、且位于顶出装置的下侧,吸取装置依次包括第一机械手、第二机械手、第三机械手、第四机械手以及第五机械手,顶出装置依次包括第一出瓦机构和第二出瓦机构,第一机械手将叉身抓取放在固定座上,固定座沿导轨移动至第二机械手一侧,第二机械手抓取第一叉瓦放置在叉身一侧上,固定座移动至第一出瓦机构一侧,第一出瓦机构将第一叉瓦向叉身方向顶出且与叉身贴合,固定座移动至第三机械手一侧,第三机械手抓取第二叉瓦放置在叉身一侧,固定座移动至第二出瓦机构一侧,第二出瓦机构将第二叉瓦向叉身方向顶出且与叉身贴合,固定座移动至第四机械手一侧,第四机械手吸取胶分别将第一叉瓦和第二叉瓦与叉身固定,固定座移动至第五机械手一侧,第五机械手吸取叉轴放置在叉轴上、且第五机械手的顶出杆顶出将叉轴与车身贴合,固定座移动至下料机械手一侧,下料机械手抓取组装后的叉身和叉轴带离固定座,节省了人工放置冲压,减少了产品的损坏率,加工效率提高。
综上所述,虽然本发明已以优选实施例揭露如上,但上述优选实施例并非用以限制本发明,本领域的普通技术人员,在不脱离本发明的精神和范围内,均可作各种更动与润饰,因此本发明的保护范围以权利要求界定的范围为准。
- 一种擒纵叉组装机
- 一种擒纵轮插钉自动组装机