基于智能视觉的酒糟自动上料方法及其系统
文献发布时间:2023-06-19 10:51:07
技术领域
本发明涉及食品加工领域,尤其涉及基于智能视觉的酒糟自动上料方法及其系统。
背景技术
白酒酿造是以粮食为主要原料,经过固态发酵、蒸馏等工序获得白酒的工艺过程。根据生产工艺要求,在酿酒料上甑过程中,酿酒料表面有气体即将冒出时要及时用酿酒料定点覆盖,减少挥发,不能采用整体敷料的方法处理,且敷料不能夯实处理,堆料过程中要保持相对酥松,以便出酒。
传统酿酒生产采用人工布料,主要通过人工来观察,凭经验判断需要铺放酿酒料区域,容易产生误判,且酿酒料铺放量也不能准确把握,影响成酒的质量,同时对工人的技术要求很高,劳动强度也比较大。另外有些酿酒料具有一定的粘度,容易成团,会影响出酒的效率。
行业目前自动上料设备:全自动上甑机器人,工作原理为酿酒料层温度场采集与分析系统基于红外图像传感器检测酿酒料层表面的温度,分析其梯度分布情况和各温度梯度区域的中心坐标,将其传送给控制系统从而达到定位补料的目的。但由于热传感是根据区域内温度为标准判断,但酿酒工艺流程中非漏气口也会出现温度较高的情况,从而产生误判。该误判会严重影响成酒的质量,不能及时及准确的判定漏气位置导致酒气泄露,影响产量。
因此,有必要提供新的基于智能视觉的酒糟自动上料方法及其系统解决上述技术问题。
发明内容
为解决上述技术问题,本发明提供的基于智能视觉的酒糟自动上料方法及其系统,给上甄机器人装上视觉眼睛,代替原本的热传感解决方式,通过最直观图像成像分析方式,能够快速准确的定位到漏气位置,从而进行补料。
本发明提供的基于智能视觉的酒糟自动上料系统包括:全自动上甑机器人、酒槽和蒸气检测和计算机处理系统,所述全自动上甑机器人的输出端通过支架固定安装有图像采集设备以及漏斗,所述酒槽设置在全自动上甑机器人下方,且酒槽的桶壁上安装有多组规格相同的光源以及储放有酒料,所述蒸气检测和计算机处理系统通过数据传输线与图像采集设备电性连接。
优选的,所述图像采集设备采用500万黑白工业相机与16mm焦距的定焦镜头。
优选的,所述光源采用蓝色光源。
优选的,所述蒸气检测系统包括工业电脑和工业机箱。
基于智能视觉的酒糟自动上料系统的操作方法:
具体步骤如下:
步骤一:图像采集设备采集无水蒸气的酒槽原始图像信息;
步骤二:图像采集设备采集实时酒槽原始图像信息;
步骤三:计算机处理系统接收到图像采集设备的无水蒸气的酒槽原始图像信息与实时酒槽原始图像信息后,用实时酒槽原始图像信息减去无水蒸气的酒槽原始图像信息,获得初步处理图像;
步骤四:对初步处理图像进行二值化处理,获得二值化图像;
步骤五:对二值化图像进行填充孔洞处理,获得预处理图像;
步骤六:对预处理图像进行斑点分析,获得水蒸气的位置信息;
步骤七:将位置信息传给全自动上甑机器人,将酿酒料由漏斗运送至该位置,完成酒料的及时有序的定区域铺放。
与相关技术相比较,本发明提供的基于智能视觉的酒糟自动上料方法及其系统具有如下有益效果:
本发明提供基于智能视觉的酒糟自动上料方法及其系统,本发明与现有的全自动上甑机器人相比,本发明通过最直观图像成像分析方式,能够快速准确的定位到漏气位置,获取其坐标后控制机器人进行补料,解决了热传感根据区域内温度为标准,当酿酒工艺流程中非漏气口出现温度较高的情况时产生误判的问题。
附图说明
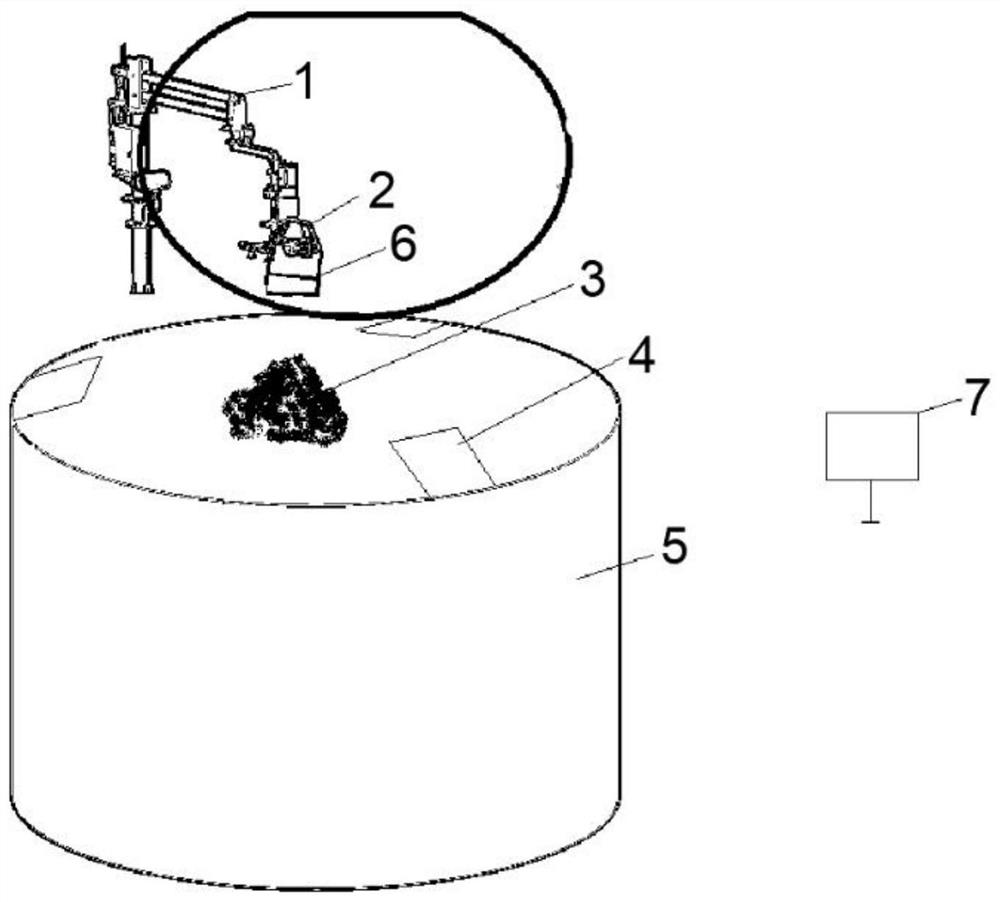
图1为本发明提供的基于智能视觉的酒糟自动上料方法及其系统的较佳实施例的结构示意图;
图2发明的基于智能视觉的酒糟自动上料系统的相机镜头采集图像的结构示意图;
图3为采用基于智能视觉的酒糟自动上料系统的自动识别蒸气位置的算法流程图。
图中标号:1、全自动上甑机器人,2、图像采集设备,3、酒料,4、光源, 5、酒槽,6、漏斗,7、蒸气检测和计算机处理系统。
具体实施方式
下面结合附图和实施方式对本发明作进一步说明。
实施例一:
请结合参阅图1和图2,其中,图1为本发明提供的基于智能视觉的酒糟自动上料方法及其系统的较佳实施例的结构示意图;图2发明的基于智能视觉的酒糟自动上料系统的相机镜头采集图像的结构示意图。包括:全自动上甑机器人1、酒槽5和蒸气检测和计算机处理系统7,所述全自动上甑机器人1的输出端通过支架固定安装有图像采集设备2以及漏斗6,而所述图像采集设备 2采用500万黑白工业相机与16mm焦距的定焦镜头,所述酒槽5设置在全自动上甑机器人1下方,且酒槽5的桶壁上安装有多组规格相同的光源4以及储放有酒料3,所述光源4采用蓝色光源,所述蒸气检测和计算机处理系统7通过数据传输线与图像采集设备2电性连接,而所述蒸气检测系统7包括工业电脑和工业机箱。
需要说明的是:工业相机通过相机固定架进行安装,而相机固定架可以对工业相机的高度和视角进行调整,500万黑白工业相机与16mm焦距的定焦镜头组合一起用于采集酒槽5漏出酿酒蒸气的图像数据,工业相机所采取的图像数据包括整个酒槽5上方的视野,工业相机与计算机连接,来传输采集的图像数据,蒸气检测系统用于处理图像采集系统传输的图像信息,对整个图像进行处理和检测蒸气,再对蒸气位置及逆行坐标标定;而全自动上甑机器人1用于支撑工业相机并接收蒸气处理系统传输来的蒸气坐标信息,机械手通过坐标信息运送酒料3到蒸气泄露位置,对泄漏蒸气位置进行酒料3补充,避免蒸气泄漏。
具体步骤如下:
步骤一:图像采集设备2采集无水蒸气的酒槽5原始图像信息;
步骤二:图像采集设备2采集实时酒槽5原始图像信息;
步骤三:计算机处理系统接收到图像采集设备2的无水蒸气的酒槽5原始图像信息与实时酒槽5原始图像信息后,用实时酒槽5原始图像信息减去无水蒸气的酒槽5原始图像信息,获得初步处理图像;
步骤四:对初步处理图像进行二值化处理,获得二值化图像;
步骤五:对二值化图像进行填充孔洞处理,获得预处理图像;
步骤六:对预处理图像进行斑点分析,获得水蒸气的位置信息;
步骤七:将位置信息传给全自动上甑机器人1,将酿酒料由漏斗6运送至该位置,完成酒料3的及时有序的定区域铺放。
在本实施例中,工业相机和工业镜头可以调整相机到酒料3的工作距离,可以针对不同大小的圆桶5位置进行蒸气检测,而工业光源的照明角度进行微调,照明亮度可以根据实际需求进行调节,本实施例中的光源4,根据现有产品光学特性,酒料产品背景色为棕黄色的外观特征,棕黄色和蓝色为互补色,通过使用互补色为蓝色的面光源照射酒糟表面,以水蒸气的白色外观特征及照射背景的黑色外观特征形成鲜明对比,使软件便于分析判断识别,而蒸气检测系统主要是使用于Vision Studio 3.3.1.6_x86版本的软件,相机采集圆桶的上方的蒸汽图像,把数据传输给工业计算机;针对蒸气透明的情况,采用预先处理,减少背景对目标检测图像的干扰,使酒糟背景呈现白色外观特征,水蒸气呈黑色外观特征,可以是检测目标与其他背景明显分开,方便后续检测;对标定的酒糟检测范围使用斑点分析算法,调整二值化梯度阈值将酒糟表面的水蒸气黑色斑块特征区分出来,当检测到视野内存在黑色斑块对其进行捕捉,从而得到酒糟表面水蒸气的具体位置,标定好蒸气位置以后,把位置信息传输给机械控制系统,机械手装载酒料到蒸气的位置,进行酒料补充,防止蒸气从圆桶上方漏出。
实施例二:
请参阅图3,图3为采用基于智能视觉的酒糟自动上料系统的自动识别蒸气位置的算法流程图。如图所示,基于智能视觉的酒糟自动上料的方法,采用实施例一所述的基于智能视觉的酒糟自动上料装置,具体自动上料方法如下:
步骤A、工业相机拍摄图像通过网线把图像传输到工业机箱,让后在计算机上打开软件Vision Studio;对拍摄图像进行处理,蒸气检测系统对图像数据进行预处理,让有蒸气的图片与无蒸气的图片逻辑运算的相减,相同的部分被减掉,避免背景图片干扰水蒸气的检测,使酒糟背景呈现白色外观特征,水蒸气呈黑色外观特征,为下一步算法处理做好准备;其中,蒸气检测系统对图像数据进行预处理包括图像逻辑相减:在两幅图像之间对应像素做减法运算,图像相减可以检测出两幅图像的差异信息,区分出水蒸气和背景的其他内容的不同;
步骤B、对输出的图像进行二值化处理,然后进行斑点分析,通过调节二值化梯度阈值将酒糟表面的水蒸气的黑色斑块特征明显区分出来,当检测到视野内存在黑色斑块对其进行捕捉,定位到黑色斑块位置,从而得到酒糟表面水蒸气的具体位置,然后根据位置框选出水蒸气位置,并在显示界面上把显示检测结果显示出来;其中,蒸气检测系统对图像数据进行斑点分析处理包括二值化处理:将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的只有黑和白的视觉效果,让水蒸气成黑色斑块;斑点分析检测:斑点指与周围有着颜色和灰度差别的区域,检测到黑色板块的位置,并且定位其位置;显示检测结果:若检测到水蒸气,在显示界面把水蒸气的位置标记出来;
步骤C、把定位到的水蒸气位置发送给全自动上甑机器人1,全自动上甑机器人1由传输来的位置对实际的位置进行位置标定,控制机械手去装载酒料的机械手的漏斗上,移动机械手达到水蒸气的位置,进行铺料;
其中,步骤C包括位置标定:根据图像中水蒸气的位置按一定比例对实际甄桶的位置进行标记;
在本实施例中,所述斑点分析检测包括以下步骤:
把图像进行二值化处理,明显区分出水蒸气和背景的其他元素;
定位到黑色板块位置并记录下来;
对黑色板块特征区域轮廓进行描绘,并用椭圆框框选出来;
将黑色板块位置在显示界面显示出来;
本实施例的检测方法,适用于连续在线检测,图像采集系统采集甄桶上方的图像数据后,输送到蒸汽检测系统,对图像数据进行预处理,然后图像进行斑点分析,并且对位置进行标定,并且发送位置到显示界面上,可观察显示界面是否框选出区域位置判定是否有水蒸气。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
- 基于智能视觉的酒糟自动上料方法及其系统
- 基于视觉的全自动上料机器人系统及其上料和输运方法