一种电容式角位移传感器及其转子
文献发布时间:2023-06-19 11:32:36
技术领域
本发明属于精密位移传感器领域,具体涉及一种电容式角位移传感器及其转子。
背景技术
近年来国内研制出了一种以时钟脉冲作为位移测量基准的时栅角位移传感器,比如CN103968750A公开的一种电场式时栅角位移传感器(也可称为电容式角位移传感器),这种传感器能实现高精度的角位移测量,但是其仍然存在如下问题:(1)转子电极采用单测头的形式,测头面积利用率低,耦合电容值较小,测头电极数量少,限制了传感器信噪比和精度的进一步提高;(2)定子电极的A、B、C、D激励相电极的连接采用中间引线的方式进行连接,引线串扰较大,导致信号干扰较大。
发明内容
本发明的目的是提供一种电容式角位移传感器及其转子,以进一步优化传感器结构,提高传感器的测量精度。
本发明所述的电容式角位移传感器的转子,包括转子基体和设置在转子基体表面的感应电极,所述感应电极由一圈相同的感应极片沿圆周方向等间隔排布组成。
感应电极有两种结构形式,一种为四测头,另一种为三测头。
所述四测头的感应电极中的第4n
所述三测头的感应电极中的第3n
本发明所述的一种电容式角位移传感器,包括定子和转子,转子包括转子基体和设置在转子基体表面的感应电极,感应电极由一圈相同的感应极片沿圆周方向等间隔排布组成,感应电极为上述四测头的结构形式,定子包括定子基体和设置在定子基体表面的激励电极,转子与定子同轴安装,设置有感应电极的转子基体表面与设置有激励电极的定子基体表面正对平行,并留有间隙,感应电极与激励电极正对,所述激励电极由一圈径向高度相同、圆心角相等的扇环形极片沿圆周方向等间隔排布组成;其中,第4n
本发明所述的另一种电容式角位移传感器,包括定子和转子,转子包括转子基体和设置在转子基体表面的感应电极,感应电极由一圈相同的感应极片沿圆周方向等间隔排布组成,感应电极为上述三测头的结构形式,定子包括定子基体和设置在定子基体表面的激励电极,转子与定子同轴安装,设置有感应电极的转子基体表面与设置有激励电极的定子基体表面正对平行,并留有间隙,感应电极与激励电极正对,所述激励电极由一圈径向高度相同、圆心角相等的扇环形极片沿圆周方向等间隔排布组成;其中,第4n
优选的,所述第4n
优选的,所述设在第4n
本发明具有如下效果:
(1)转子的感应电极采用三测头或四测头的形式,提高了感应电极的面积利用率,增大了耦合电容值,从而提高了信噪比,增强了在工业现场的抗干扰能力。此外,采用三测头输出信号进行处理,还可以有效地消除某些特定频率的谐波误差,进一步提高传感器的测量精度。
(2)定子的激励电极采用两组双绞线进行连接,A相激励信号引线与C相激励信号引线在激励电极的内侧组成双绞线,B相激励信号引线与D相激励信号引线在激励电极的外侧组成双绞线;当四个激励相分别通入相位依次相差90°的四路激励信号时,双绞线的结构形式使来自A相激励信号引线的干扰与来自C相激励信号引线的干扰能够彻底抵消,同时双绞线的结构形式也使来自B相激励信号引线的干扰与来自D相激励信号引线的干扰能够彻底抵消,从而减小了干扰信号对测量精度的影响,保证了测量精度。
(3)采用斜余弦形的感应极片,可以实现对电场强度变化的正弦调控,抑制电场中的谐波成分,进一步提高了测量精度。
附图说明
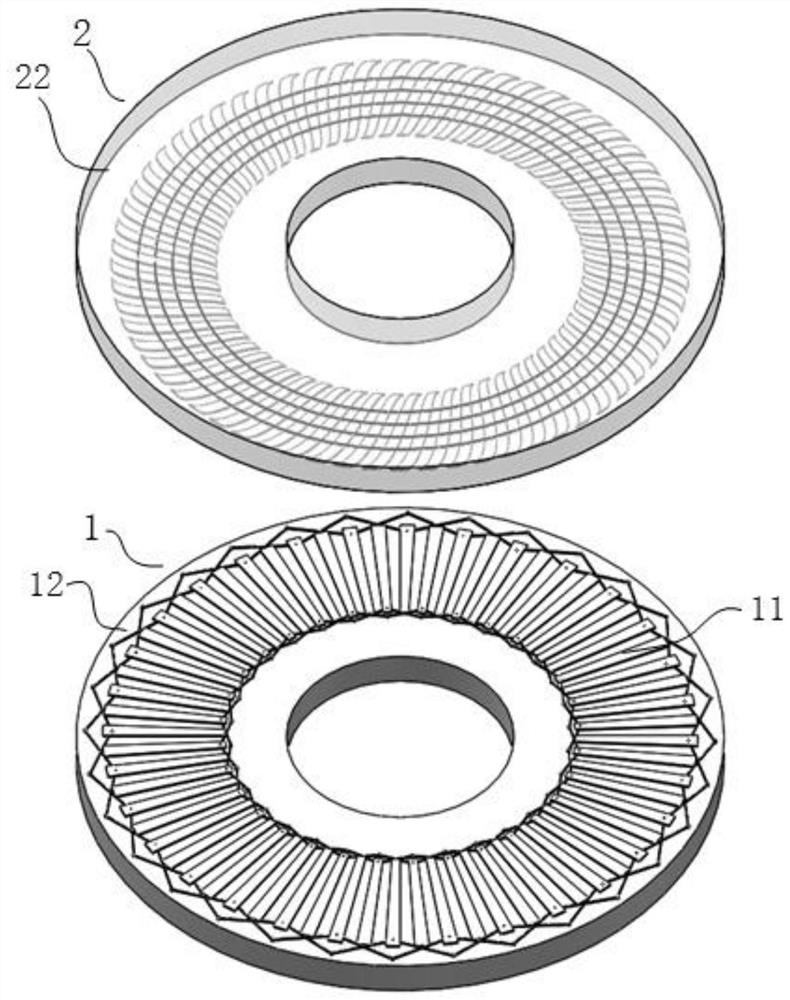
图1为实施例1中转子与定子的对应关系示意图。
图2为实施例1中定子的结构示意图。
图3为实施例1中转子的仰视图。
图4为实施例1中感应电极与激励电极的投影关系的局部示意图。
图5为实施例1中的信号处理原理框图。
图6为实施例2中转子与定子的对应关系示意图。
图7为实施例2中转子的仰视图。
图8为实施例2中感应电极与激励电极的投影关系的局部示意图。
图9为实施例3中转子与定子的对应关系示意图。
图10为实施例3中转子的仰视图。
图11为实施例3中感应电极与激励电极的投影关系的局部示意图。
图12为实施例4中转子与定子的对应关系示意图。
图13为实施例4中转子的仰视图。
图14为实施例4中感应电极与激励电极的投影关系的局部示意图。
图15为实施例4中的信号处理原理框图。
图16为实施例5中转子与定子的对应关系示意图。
图17为实施例5中转子的仰视图。
图18为实施例5中感应电极与激励电极的投影关系的局部示意图。
图19为实施例6中转子与定子的对应关系示意图。
图20为实施例6中转子的仰视图。
图21为实施例6中感应电极与激励电极的投影关系的局部示意图。
具体实施方式
下面结合附图对本发明作详细说明。
实施例1:如图1至图4所示的电容式角位移传感器,包括定子1和与定子1同轴安装的转子2,定子1包括定子基体12和设置在定子基体12上表面的激励电极11,转子2包括转子基体22和设置在转子基体22下表面的感应电极21,转子基体22的下表面与定子基体12的上表面正对平行,并留有0.5mm间隙,定子基体12、转子基体22均采用陶瓷作为基体材料,通过在陶瓷表面喷镀一层铁镍合金作为电极的极片。
如图1、图2所示,激励电极11由一圈内圆半径为18mm、外圆半径为28mm、径向高度为10mm、圆心角为2.8125°的扇环形极片沿圆周方向(即定子基体12的周向)等间隔排布组成,该间隔所对的圆心角(即相邻两个扇环形极片之间间隔的圆心角)为2.8125°,激励电极11的对极数M
n
如图1、图3、图4所示,感应电极21与激励电极11正对,感应电极21为四测头结构,感应电极21由一圈相同的感应极片沿圆周方向等间隔排布组成,该间隔所对的圆心角(即相邻两个感应极片之间间隔的圆心角)为2.8125°,感应电极21的对极数M
如图5所示,测量时,转子2与定子1相对平行转动,对A、B、C、D激励相分别施加相位依次相差90°的四路同频等幅正弦激励电压(即A、B、C、D激励相的激励信号引线中分别通入相位依次相差90°的四路同频等幅正弦激励信号),激励信号经过激励电极11与感应电极21之间的耦合电场,在感应电极21的A、B、C、D感应组上各产生一路行波信号(总共四路行波信号),四路行波信号经硬件电路处理成四路方波信号后,输入FPGA信号处理系统,经处理换算成角位移值。
实施例2:如图6至图8所示的电容式角位移传感器,其测量原理以及大部分结构与实施例1相同,不同之处在于:感应电极21中的感应极片的形状为沿圆周方向倾斜的两条斜线段在起止点与同心的内外圆弧相交而围成的封闭图形(即斜梯形),两条斜线段的起始点所夹的圆心角为2.8125°(即内圆弧所对的圆心角为2.8125°),每条斜线段的起止点所夹的圆心角为11.25°,内圆弧的半径为19mm,外圆弧的半径为27mm,每个感应极片的径向高度为8mm。
实施例3:如图9至图11所示的电容式角位移传感器,其测量原理以及大部分结构与实施例1相同,不同之处在于:感应电极21中的感应极片的形状为极坐标下的[0,2.8125°区间的两条幅值相等、相位相反的半周期正弦曲线段所围成的封闭图形(即双正弦形);每个感应极片的中心到圆心的距离(即每个感应极片的中心所在的圆的半径)为23mm,每个感应极片的径向高度为8mm、所对的圆心角为2.8125°。
实施例4:如图12至图14所示的电容式角位移传感器,其测量原理以及大部分结构与实施例1相同,不同之处在于:感应电极21为三测头结构,感应电极21由一圈相同的感应极片沿圆周方向等间隔排布组成,该间隔所对的圆心角(即相邻两个感应极片之间间隔的圆心角)为3.75°,感应电极21的对极数M
如图15所示,测量时,转子2与定子1相对平行转动,对A、B、C、D激励相分别施加相位依次相差90°的四路同频等幅正弦激励电压(即A、B、C、D激励相的激励信号引线中分别通入相位依次相差90°的四路同频等幅正弦激励信号),激励信号经过激励电极与感应电极之间的耦合电场,在感应电极21的A、B、C感应组上各产生一路行波信号(总共三路行波信号),三路行波信号经硬件电路处理成三路方波信号后,输入FPGA信号处理系统,经处理换算成角位移值。
实施例5:如图16至图18所示的电容式角位移传感器,其测量原理以及大部分结构与实施例4相同,不同之处在于:感应电极21中的感应极片的形状为沿圆周方向倾斜的两条斜线段在起止点与同心的内外圆弧相交而围成的封闭图形(即斜梯形),两条斜线段的起始点所夹的圆心角为3.75°(即内圆弧所对的圆心角为3.75°),每条斜线段的起止点所夹的圆心角为11.25°,内圆弧的半径为19mm,外圆弧的半径为27mm,每个感应极片的径向高度为8mm。
实施例6:如图19至图21所示的电容式角位移传感器,其测量原理以及大部分结构与实施例4相同,不同之处在于:感应电极21中的感应极片的形状为极坐标下的[0,3.75°]区间的两条幅值相等、相位相反的半周期正弦曲线段所围成的封闭图形(即双正弦形);每个感应极片的中心到圆心的距离(即每个感应极片的中心所在的圆的半径)为23mm,每个感应极片的径向高度为8mm、所对的圆心角为3.75°。
- 一种电容式角位移传感器及其转子
- 一种分瓣电容式角位移传感器