基于多传感器融合的地图特征的高架桥中的车辆定位方法
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及自动驾驶及定位技术领域,尤其涉及一种基于多传感器融合的地图特征的高架桥中的车辆定位方法。
背景技术
无人驾驶近几年发展迅速,研究表面,无人驾驶在增强公路交通安全,缓解交通拥堵,减少空气无人方面有着颠覆性的改善。无人驾驶场景大多数用在开阔的环境下进行,在封闭、多层的环境下技术瓶颈有待提升。
现在的技术手段主要依赖于GPS加惯性导航,但受制于GPS的影响,在信号弱的环境下无法进行定位。GPS技术通过太空中的卫星,能够迅速定位出用户端在地球上的位置和海拔,GPS系统精准关键在于卫星和用户端的精准计算,但是在一些城市、山区、隧道高层建筑物以及封闭环境的影响,会导致信号的非直线传播,影响精度。惯性传感主要包括加速度计和角速度计,其特点是更新频率高,可以提供实时的位置信息,但是致命缺点是它的误差会随着时间的推进而增加。当车辆处于高架桥区,因高架往往错综复杂,而高架桥上与桥下路段平行,会导致GPS不准确或者是上下垂直高架,易发生路线判断错误问题,因此,主要依靠GPS经纬度及连续的GPS位置来判断绑定高架桥中的车辆的位置比较困难。
因此,有必要开发一种基于多传感器融合的地图特征的高架桥中的车辆定位方法,利用多种传感器定位数据纠正GPS定位的误差,完成多层级精准定位,能够实现高精度车辆定位。
发明内容
本发明要解决的技术问题是提供一种基于多传感器融合的地图特征的高架桥中的车辆定位方法,利用多种传感器定位数据纠正GPS定位的误差,完成多层级精准定位,能够实现高精度车辆定位。
为了解决上述技术问题,本发明采用的技术方案是:该基于多传感器融合的地图特征的高架桥中的车辆定位方法,具体包括以下步骤:
S1:采用车载GPS进行预定位,进行激光雷达特征点提取,获得激光雷达数据;
S2:采用视觉相机获得视觉定位图像,建立像素空间坐标系后,对视觉定位图像进行特征点提取,再将提取的特征点坐标转为世界坐标系统,获得视觉图像数据;
S3:将所述步骤S1中的激光雷达数据和所述步骤S2中的视觉图像数据进行匹配融合,获得匹配特征点以及纠正后的感知数据集;
S4:将所述步骤S3中获得的所述匹配特征点与地图进行匹配,获得在地图上的行程特征点及行程特征点数据集;
S5:根据所述步骤S4中获得的行程特征点计算得出车辆的定位。
采用上述技术方案,使用滤波器对惯性传感器与车载GPS数据进行融合并进行位置预测,再将GPS定位数据与激光雷达定位数据和视觉定位数据进行融合,利用多种传感器定位数据纠正GPS定位的误差,完成多层级精准定位,多传感器包括激光雷达和视觉相机,激光雷达和视觉相机提取的目标适用于多层级中定位;该基于多传感器融合的地图特征的高架桥中的车辆定位方法有效地提高复杂环境下车辆的定位准确性及可靠性,进而提升了用户体验。
作为本发明的优选技术方案,所述步骤S1中的具体步骤为:
S11:利用滤波器将惯导传感器和车载GPS的数据进行融合,得到初步的平面点位;
S12:对激光雷达发射器发射出激光射线,收集反射点距离和该反射点发生的时间和水平角度,并转换出反射点P的空间坐标M
作为本发明的优选技术方案,所述步骤S2的具体步骤为:
S21:采用视觉相机获得视觉定位图像,通过定位图像前一帧的像素求解出当前帧的像素的旋转矩阵R和平移向量T,即相对于前一帧的姿态和位移;
S22:将当前帧的像素的坐标系转化成世界坐标系,转换的公式为:
其中,(X
作为本发明的优选技术方案,所述步骤S3的具体步骤为:
将所述步骤S1中的激光雷达数据和所述步骤S2中的视觉图像数据进行匹配融合,所述激光雷达数据的所述视觉图像数据的配准关系采用3X3的矩阵R
作为本发明的优选技术方案,所述步骤S4的具体步骤为:
S41:将步骤S3中获得的匹配特点的坐标作为静态坐标标记到高精地图中,若匹配特征点无效,则返回步骤S3重新进行匹配融合;若匹配特征点有效,则转至步骤S42;
S42:若匹配特征点有效,则将各个有效的匹配特征点数据抽象成地图中的元素的属性,从而获得行程特征点数据集;
S43:在每次实车测试验证时不断修正高精地图的特征数据集。
作为本发明的优选技术方案,所述步骤S5具体步骤为:
S51:调取有效探测范围内的高精度地图数据为定位基准;
S52:以GPS为初值,调取融合到高精地图里的特征数据做配准,修正车的位置和姿态信息,以完成辅助定位的功能。
与现有技术相比,本发明具有的有益效果为:
(1)该基于多传感器融合的地图特征的高架桥中的车辆定位方法将多种传感器进行了有效的融合,可方面实现高精度车辆定位;
(2)该基于多传感器融合的地图特征的高架桥中的车辆定位方法提高传统GPS的定位精度,由原来的米级定位,融合之后定位精度可到厘米级;
(3)该基于多传感器融合的地图特征的高架桥中的车辆定位方法采用激光雷达,能够判断物体远近的能力,满足无人车在实时检测障碍物的能力;
(4)该基于多传感器融合的地图特征的高架桥中的车辆定位方法采用视觉相机,结合视觉定位,从而适应恶劣的天气,不受抗悬浮物影响,进而提升了用户的体验。
附图说明
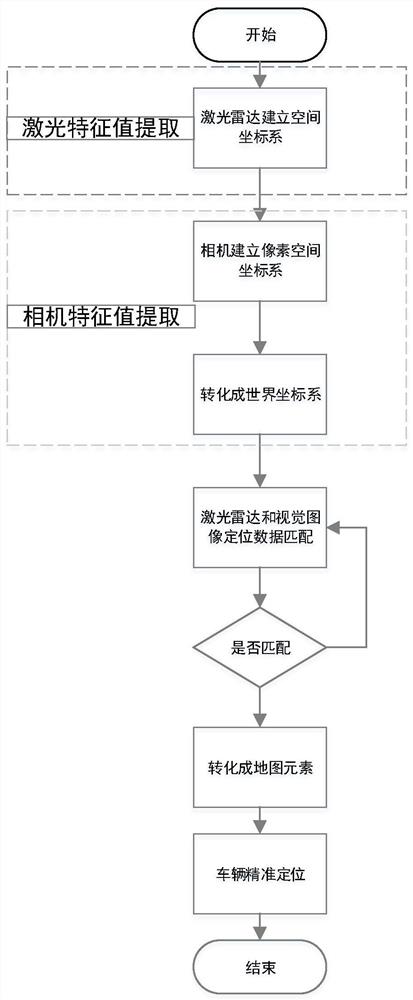
图1为本发明的基于多传感器融合的地图特征的高架桥中的车辆定位方法的流程图;
图2为本发明的基于多传感器融合的地图特征的高架桥中的车辆定位方法的坐标转换原理图。
具体实施方式
下面将结合本发明的实施例图中的附图,对本发明实施例中的技术方案进行清楚、完整的描述。
实施例:如图1所示,该基于多传感器融合的地图特征的高架桥中的车辆定位方法,具体包括以下步骤:
S1:采用车载GPS进行预定位,进行激光雷达特征点提取,获得激光雷达数据;所述步骤S1中的具体步骤为:
S11:利用滤波器将惯导传感器和车载GPS的数据进行融合,得到初步的平面点位;
S12:对激光雷达发射器发射出激光射线,收集反射点距离和该反射点发生的时间和水平角度,并转换出反射点P的空间坐标M
S2:采用视觉相机获得视觉定位图像,建立像素空间坐标系后,对视觉定位图像进行特征点提取,再将提取的特征点坐标转为世界坐标系统,获得视觉图像数据;所述步骤S2的具体步骤为:
S21:采用视觉相机获得视觉定位图像,通过定位图像前一帧的像素求解出当前帧的像素的旋转矩阵R和平移向量T,即相对于前一帧的姿态和位移;
S22:将当前帧的像素的坐标系转化成世界坐标系,转换的公式为:
其中,(X
S3:将所述步骤S1中的激光雷达数据和所述步骤S2中的视觉图像数据进行匹配融合,获得匹配特征点以及纠正后的感知数据集;所述步骤S3的具体步骤为:将所述步骤S1中的激光雷达数据和所述步骤S2中的视觉图像数据进行匹配融合,所述激光雷达数据的所述视觉图像数据的配准关系采用3X3的矩阵R
S4:将所述步骤S3中获得的所述匹配特征点与地图进行匹配,获得在地图上的行程特征点及行程特征点数据集;所述步骤S4的具体步骤为:
S41:将步骤S3中获得的匹配特点的坐标作为静态坐标标记到高精地图中,若匹配特征点无效,则返回步骤S3重新进行匹配融合;若匹配特征点有效,则转至步骤S42;
S42:若匹配特征点有效,则将各个有效的匹配特征点数据抽象成地图中的元素的属性,从而获得行程特征点数据集;
S5:根据所述步骤S4中获得的行程特征点计算得出车辆的定位;
所述步骤S5根据所述步骤S4中获得的行程特征点计算得出车辆的定位的具体步骤为:
S51:调取有效探测范围内的高精度地图数据为定位基准;
S52:以GPS为初值,调取融合到高精地图里的特征数据做配准,修正车的位置和姿态信息,以完成辅助定位的功能。
以上所述仅为本发明的较佳实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 基于多传感器融合的地图特征的高架桥中的车辆定位方法
- 基于SLAM地图与高精度地图匹配的车辆定位方法及系统