一种管道机器人的复合运动机构及其控制方法
文献发布时间:2023-06-19 18:27:32
技术领域:
本发明涉及管道机器人技术领域,具体涉及一种管道机器人的复合运动机构及其控制方法。
技术背景:
现如今,管道在众多领域中的应用已经越来越广泛,而管道机器人作为一种特种机器人,其进行管内作业的应用数目在不断增加。在实际作业的管道系统中,中小型管道存在的大量的特殊管路,例如:T型、 L型、钝角和锐角等,同时也存在较多的水平和竖直管路的空间布置;针对中小型管道中的特殊管路,人们已经开发出众多管道机器人。韩国汉阳大学Young-Sik Kwon设计了一种可折叠管道检测机器人,可通过竖直管道和部分弯管;武汉大学陈潇设计了一种自适应履带式管道检测机器人,其在弯管和环行台阶处具有一定的管道通过性。由于现有的管道机器人多为刚性机构、电机驱动,因而多存在灵活性差及牵引力不足的问题,尤其在特殊管路处的通过性表现不佳。
随着新型材料产生,人们研究出了多种柔性管道机器人,与刚性管道机器人相比具有管道通过性好灵活性高、管道适应能力强的特点。但现有的柔性管道机器人大多存在无法在特殊管路处实现主动转向、牵引力不足、被动适应管道的问题,无法满足实际需求。
发明内容:
本发明针对管道机器人在中小型管道中的特殊管路处无法实现主动转向、牵引力不足、被动适应管道的技术问题,提出一种管道机器人的复合运动机构及其控制方法。本发明可以使管道机器人在中小型管道中的特殊管路处实现转向运动与直线运动,可以提供较高的牵引能力,同时可以在内壁不规则的管道中表现出强主动适应性和强通过性。
具体技术方案如下:
本发明首先提供一种管道机器人的复合运动机构,其特征在于:由一个环形腔室组件、一个伸缩组件及两个连接组件构成。所述复合运动机构同时具有柔性支撑、主动转向和直线运动,所述复合运动机构可以通过环形腔室组件实现径向膨胀和收缩,完成与管道内壁的接触和分离,实现柔性支撑功能,所述复合运动机构可以通过轴向单侧的收缩和复位,实现特殊管路处的主动转向功能,所述复合运动机构可以通过伸缩组件的轴向整体的收缩和复位,完成管内蠕动,实现直线运动。所述复合运动机构可以通过连接组件组装完成管道机器人,实现多个复合运动机构的连接。
作为优选,所述复合运动机构的环形腔室组件将伸缩组件包裹,环形腔室组件与伸缩组件同轴配合,所述伸缩组件的前后端与环形腔室组件的前后端通过螺纹配合连接,所述连接组件通过连接螺钉固定在复合运动机构的两端,组成完整的复合运动机构。
作为优选,所述复合运动机构的环形腔室组件由柔性支撑气囊、密封伸缩管、支撑气囊轧带、前后支撑气囊端盖、前密封伸缩管接头、后密封伸缩管接头、前中心螺旋管及后中心螺旋管组成,可以实现复合运动机构的柔性支撑功能。所述的前支撑气囊端盖为阶梯状的环形凹槽结构,同轴布置在柔性支撑气囊的前侧。所述的后支撑气囊端盖为阶梯状的环形凹槽结构,同轴布置在柔性支撑气囊的后侧。所述柔性支撑气囊的内侧同轴配合前支撑气囊端盖和后支撑气囊端盖的凹槽曲面,生料进行密封。所述的密封伸缩管为梯形波纹的管结构,同轴配合前和后密封伸缩管接头的最小直径外圆曲面,胶接进行密封。所述的前和后密封伸缩管接头为阶梯状的环形结构,包括三个直径不同的外圆曲面,其中间直径的外圆曲面同轴配合前支撑气囊端盖和后支撑气囊端盖的内环,胶接进行密封,并通过连接螺钉固定在前后支撑气囊端盖上,所述前后中心螺旋管为圆环结构,其中一半的轴向长度具有外螺纹,与前后支撑气囊端盖内侧的中心部位螺纹孔配合连接。
作为优选,所述前支撑气囊端盖的轴向内端面具有周布的六棱柱凹槽,所述六棱柱凹槽底部的中心位置具有轴向贯穿前支撑气囊端盖的气管通孔。
作为优选,所述后支撑气囊端盖的轴向内侧面具有周布的圆柱凹槽,所述圆柱凹槽没有轴向贯穿后支撑气囊端盖。所述六棱柱凹槽和圆柱凹槽各具有六个,任意相邻两个凹槽之间夹角为60度。
作为优选,所述支撑气囊轧带布置于前后支撑气囊端盖的凹槽处,紧固密封柔性支撑气囊。
作为优选,所述复合运动机构的伸缩组件由穿板气管接头、前端盖卡盘、气动伸缩体、球型螺母、后端盖卡盘、连接螺钉孔及中心弹簧构成,可以实现在特殊管路处的主动转向功能及在管道内的直线运动功能。所述穿板气管接头中心为通孔,左侧为宝塔气嘴结构,中间具有六棱柱结构,右侧外螺纹柱结构穿过前端盖卡盘上周布的气管接头通孔。所述前端盖卡盘为圆环结构,具有周布的气管接头通孔和螺钉通孔,与前支撑气囊端盖的螺纹孔进行配合连接。所述气动伸缩体为具有弹性的柔性腔体,可以通过驱动气体使其轴向收缩,气动伸缩体的前端与穿板气管接头螺纹配合连接,后端与球型螺母配合连接。所述球型螺母为球结构,其头部为球体、身体为圆柱体,与后端盖卡盘上周布的铰链通孔相互配合连接。所述后端盖卡盘为圆环结构,具有周布的球型螺母通孔和螺钉通孔,与后支撑气囊端盖的螺纹孔进行配合连接。所述中心弹簧可以在收缩和延伸后恢复原状,中心弹簧布置在前后端盖卡盘之间,与中心螺旋管同轴配合。
作为优选,所述一个伸缩组件包含六个穿板气管接头、六根气动伸缩体、六个球型螺母、一个中心弹簧,穿板气管接头周布固定在前端盖卡盘上,任意两个夹角为60度,六根气动伸缩体分别为I-VI,周布连接在前后端盖卡盘之间,任意两个夹角为60度,球型螺母周布连接在后端盖卡盘上,任意两个夹角为 60度。
作为优选,所述伸缩组件的单侧气动伸缩体充入驱动气体,气动伸缩体轴向收缩,完成转向驱动组件轴向单侧的主动弯曲,实现复合运动机构的主动转向。所述伸缩组件轴向的全部气动伸缩体充入驱动气体,气动伸缩体轴向收缩,完成伸缩组件轴向整体的收缩,实现了复合运动机构的直线运动。
作为优选,所述气动伸缩体与中心弹簧为拮抗配合,所述拮抗配合为气动伸缩体的轴向收缩与中心弹簧的轴向伸长始终互相作用,使伸缩组件始终处于轴向绷直状态。
作为优选,所述连接组件由连接角码和连接螺钉组成,一个复合运动机构具有两个连接角码,通过连接螺钉固定在环形腔室组件外部的两端,配合组装完成管道机器人,所述的管道机器人包括至少3个复合运动机构才可以实现管道内运动,通过连接组件实现复合运动机构之间的连接。
作为优选,所述一种管道机器人的复合运动机构,其控制方法的基础元件主要由空气压缩机、空气过滤器、减压阀、油雾器、气体流量调节阀、阀座、三位五通电磁阀及若干气管组成。所述三位五通电磁阀具有7个,均为中封式三位五通电磁换向阀,分别为第一电磁换向阀、第二电磁换向阀、第三电磁换向阀、第四电磁换向阀、第五电磁换向阀、第六电磁换向阀、第七电磁换向阀,通过阀座将电磁换向阀并排布置,所述第一至第六电磁换向阀依次与第I至第VI气动伸缩体气路连接,第七电磁换向阀与环形腔室气路连接,同时第一至第七电磁换向阀的左侧出气口接气路,右出气口则全部堵死,其具体实施步骤如下:
1)接通主气路后,通过减压阀与气体流量调节阀控制驱动气体的压力和流量使之满足条件。
2)将第七电磁换向阀打开左位与主气路接通,驱动气体开始进入到复合运动机构的环形腔室组件内,柔性支撑气囊开始膨胀,执行完预定的柔性支撑时间后,将第七电磁换向阀打开中位,柔性支撑气囊结束膨胀并与不规则管壁紧密接触,复合运动机构处于柔性支撑的保持状态,将第七电磁换向阀打开右位,驱动气体开始排出复合运动机构的环形腔室组件,柔性支撑气囊开始收缩,与不规则管壁逐渐分离,复合运动机构恢复原状。
3)将第一至第三电磁换向阀打开左位与主气路接通,第四至第六电磁换向阀打开中位,驱动气体开始进入I、II及III气动伸缩体并开始轴向收缩,而IV、V及VI气动伸缩体则保持原状,开始拉动复合运动机构向I、II及III气动伸缩体方向主动转向,执行完转向后,将第一至第三电磁换向阀接通中位,驱动气体不再进入第I、第II及第III气动伸缩体并使其保持轴向收缩,复合运动机构保持在I、II及III气动伸缩体方向的转向,将第一至第三电磁换向阀打开右位,驱动气体开始排出I、II及III气动伸缩体使其恢复原状,复合运动机构恢复原来状态;而复合运动机构的其他方向的主动转向控制与之原理相同。
4)将第一至第六电磁换向阀全部打开左位与主气路接通,驱动气体开始进入第I至第VI气动伸缩体并开始轴向收缩,开始拉动复合运动机构向整体的轴向收缩,将第一至第六电磁换向阀全部打开中位,驱动气体不再进入第I至第VI气动伸缩体并使其保持轴向收缩,复合运动机构保持轴向的收缩状态,将第一至第六电磁换向阀全部打开右位,驱动气体开始排出第I至第VI气动伸缩体使其恢复原状,复合运动机构恢复原来状态,基于该方法配合控制至少3个复合运动机构,可以实现管道机器人在管道内的直线运动。
本发明的一种管道机器人的复合运动机构具有以下优点:
1、可以实现主动转向功能。在中小型管道的特殊管路处,根据在管道机器人头部安装传感模块反馈的信号,通过控制伸缩组件轴向单侧的主动弯曲,实现复合运动机构的主动转向,为管道机器人提供特殊管路处的主动转向能力。
2、可以实现输出牵引力的成倍增加。该复合运动机构可以作为模块化拼接,根据实际需求增加主动转型机构的数量,达到成倍增加管道机器人输出牵引力的目的,所述管道机器人包括至少三个复合运动机构才可以实现管内运动。
3、可以实现管道内的强主动适应性。该复合运动机构的柔性支撑气囊具有极好的环境适应性,在不规则内壁的管道内仍然可以实现与管壁的主动紧密贴合,为管道机器人提供强大的支撑力;同时在使用至少4个复合运动机构组装的管道机器人进行作业时,当某一个主动转向模块失效而无法正常运作时,可以使用其他的至少3个复合运动机构仍然可以进行管内运动,使机器人具有极好的主动适应能力。
4、可以实现管道内的强通过性。该复合运动机构的伸缩组件具有极好的转向功能,在存在障碍物的管道内可以实现主动避障,为管道机器人提供强大的通过能力。
5、可以实现闭环控制,该复合运动机构的头部具有安装传感装置的螺纹孔,由该机构组装而成的管道机器人可以根据传感装置反馈的信号,实现在特殊管路处的主动转向和管道内部对主动避障的精确控制,最大限度地提高管道机器人的智能化水平。
附图说明:
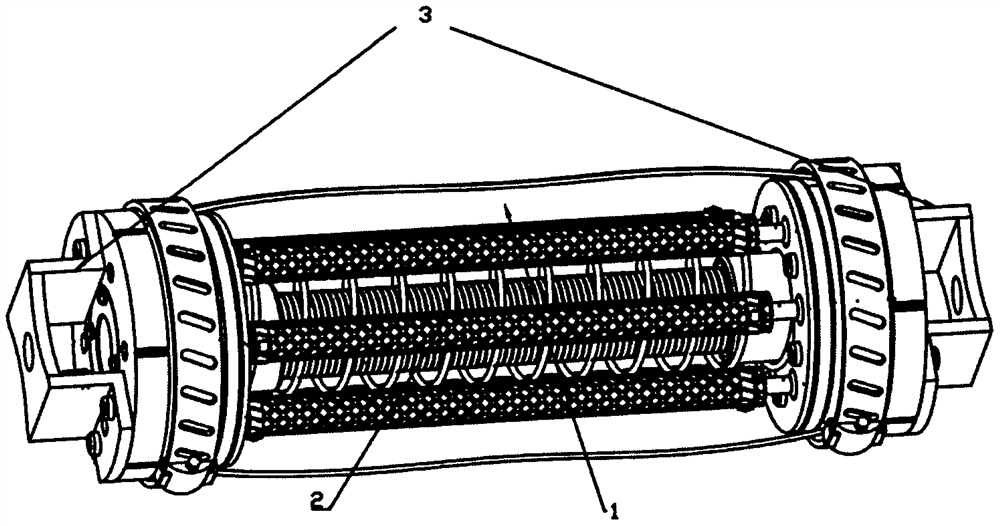
图1为本发明实施例管道机器人的复合运动机构整体结构示意图。
图2为本发明实施例管道机器人的复合运动机构整体剖面示意图。
图3为机构的环形腔室组件及连接组件的结构示意视图。
图4为机构的伸缩组件的结构示意图。
图5为机构在特殊管路处的主动转向运动示意图。
图6为机构控制电路接线示意图。
图中各标号表示:1-环形腔室组件、2-伸缩组件、3-连接组件、11-前支撑气囊端盖、12-柔性支撑气囊、13-后支撑气囊端盖、14-前密封伸缩管接头、15-后密封伸缩管接头、16-密封伸缩管、17-前中心螺旋管、18-后中心螺旋管、19-支撑气囊轧带、110-气管快速接头、111-环形腔室组件进气孔、112-圆柱型凹槽、113六棱柱凹槽、114-气动伸缩体进气孔、115-转向定位槽口、21-穿板气管接头、22-前端盖卡盘、 23-后端盖卡盘、24-中心弹簧、25-球型螺母、26-气动伸缩体、261-前气动伸缩体堵头、262-后气动伸缩体堵头、263-气动伸缩体轧带、264-气动伸缩体编制网、265-气动伸缩体弹性元件、31-连接角码、32-连接螺钉。
具体实施方式:
下面通过示意图和具体实施方式对本机构进行具体阐述:
根据图1-6所示,本发明所公开的一种管道机器人的复合运动机构,主要包括1-环形腔室组件、2- 伸缩组件、3-连接组件。环形腔室组件1将伸缩组件2同轴包裹在内部,通过连接螺钉将二者进行连接。连接组件3通过连接螺钉固定在环形腔室组件外部的两端。
本发明中,环形腔室组件1由前支撑气囊端盖11、柔性支撑气囊12、前支撑气囊端盖13、前密封伸缩管接头14、后密封伸缩管接头15、密封伸缩管16、前中心螺旋管17、后中心螺旋管18、支撑气囊轧带 19、气管快速接头13组成。前支撑气囊端盖11和前支撑气囊端盖13中间设有环形凹槽结构,在环形凹槽的周圈缠上多层密封生料带,将柔性支撑气囊12的前后两端套在前后端盖的环形凹槽上,用支撑气囊轧带19将柔性支撑气囊12固定在前后端盖的环形凹槽结构上并进行了密封。密封伸缩管16的两端分别与前后密封伸缩管接头15和16的最小直径圆环进行配合,胶接密封固定,前后密封伸缩管接头15和16 分与前后支撑气囊端盖11和13的外侧内环配合,胶接密封,并用螺钉进行固定。前后中心螺旋管17和 18都为圆环结构,其中一半的轴向长度具有螺纹,与前后支撑气囊端盖11和13内侧的中心部位螺纹孔配合连接。如此驱动气体通过后支撑气囊端盖中的环形腔室进气孔112进入或者排出环形腔室组件,实现柔性支撑气囊12的膨胀和收缩,完成复合运动机构在管道内的支撑和恢复。
本发明中,伸缩组件2由穿板气管接头21、前端盖卡盘22、后端盖卡盘23、中心弹簧24、球型螺母 25、气动伸缩体26构成。前端盖卡盘22和后端盖卡盘23布置在中心弹簧24的两端,中心弹簧24预先设有一定的压缩量,布置在轴向中心位置,伸缩组件2具有6个气动伸缩体26,以间隔60度周向布置在前后卡盘6、7之间,将中心弹簧包围,通过球型螺母25和穿板气管接头21分别与气动伸缩体26的前后端配合连接,由此构成伸缩组件。
本发明中,环形腔室组件1将伸缩组件2包裹在内,前支撑气囊端盖11内侧周布的圆柱型凹槽112 与球型螺母25配合,后支撑气囊端盖13内侧周布的六棱柱凹槽113与穿板气管接头21配合并胶接密封,前后端盖卡盘6和7的内环与前后中心螺旋管17和18配合,后通过连接螺钉32将前端盖卡盘22和后端盖卡盘23分别固定在前后支撑气囊端盖11和13上,如此球型螺母25被卡在圆柱型凹槽112内,穿板气管接头21被卡在六棱柱凹槽113内,由此环形腔室组件1和伸缩组件2便配合构成复合运动机构的中间主体部分。
本发明中,连接组件由连接角码31和连接螺钉32组成,一个复合运动机构具有两个连接角码31,通过连接螺钉32固定在环形腔室组件的外部两端。所述的管道机器人包括至少3个复合运动机构才可以实现管道内运动,通过连接组件3实现复合运动机构之间的组合,完成管道机器人的组装。
下面对该机构的工作原理进行详细阐述:
使用至少3个相互串联的该复合运动机构可以完成管道机器人的组装,同时实现管道机器人在管道内部的柔性支撑、主动转向及直线运动。
通过PC端发出执行柔性支撑指令,驱动气体开始进入到复合运动机构的环形腔室组件1内,柔性支撑气囊12开始膨胀,执行完预定的柔性支撑时间后,PC端发出保持柔性支撑指令,如图5所示,柔性支撑气囊12结束膨胀,与不规则管壁紧密接触,复合运动机构处于保持支撑的保持状态,PC端发出结束柔性支撑指令,驱动气体开始排出复合运动机构的环形腔室组件1,柔性支撑气囊12开始收缩,与不规则管壁逐渐分离,复合运动机构恢复原状。
以T型管道为例实现复合运动机构的主动转向运动,如图6所示,该复合运动机构位于复杂管道处,需要实现复合运动机构向竖直方向管道转向的能力,通过PC端发出主动转向指令,向伸缩组件2中设定单侧的气动伸缩体26充入驱动气体,设定单侧的气动伸缩体26-I、26-II及26-III开始轴向收缩而相对的单侧的气动伸缩体26不充入驱动气体,相对侧面的气动伸缩体26-IV、26-V及26-VI保持原状,从而拉动复合运动机构向竖直方向管道进行主动转向。
通过复合运动机构实现在管道内的直线运动。PC端发出开始直线运动指令,向伸缩组件中的六根气动伸缩体26同时充入驱动气体,气动伸缩体26克服中心弹簧24的作用力开始轴向收缩,从而实现复合运动机构的整体轴向收缩,当执行完直线运动指令后,PC端发出保持直线运动指令,气动伸缩体26停止充入驱动气体并保持收缩状态,PC端发出结束直线运动指令,驱动气体开始排出六根气动伸缩体26,复合运动机构在中心弹簧24的作用下恢复原状,基于该方法通过配合控制至少3个复合运动机构可以实现管道机器人在管道内的直线运动。
以上所述仅为本发明的优选实施方式,本发明的保护范围并不局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种全驱动复合吸附式爬行机器人运动机构的控制方法
- 一种全驱动复合吸附式爬行机器人运动机构的控制方法