基于可移式电动缸的六维测力台标定装置及标定方法
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及六维力传感器标定技术领域,具体涉及基于可移式电动缸的六维测力台标定装置及使用该标定装置进行标定的方法。
背景技术
全球制造业正迈向数字化、智能化时代,智能制造正成为许多国家制造业发展的重中之重。六维力传感器(六维测力台)可以同时测量空间内三维力和三维力矩信息,在国防科技、汽车电子、机械加工等各个领域有着广泛的应用,是发展智能制造的基础和核心。
六维测力台加工好后,需要对传感器进行标定,确定传感器的输入与输出之间的关系。但是现有的标定装置都是将六维测力台固定在标定台上,将砝码钩挂在测力点上,接着再往上增加砝码。由于需要拟合出传感器的输入与输出之间的关系,标定得到的数据点越多,结果越精确。因此需要人力多次搬运砝码完成标定,这样不仅操作繁琐,而且会导致标定时间变长,整体的工作效率不高,且人工操作搬运砝码得出的输入输出关系误差较大,无法提供线性力关系。
发明内容
为了克服现有技术的上述不足,本申请提供了基于可移式电动缸的六维测力台标定装置,通过组合导轨和十字导轨的设置能够实现对标定组件的免拆六维力标定,降低标定结果误差,通过控制高精度传感器进行标定,减少人力成本以及人工操作,提高标定结果的准确度;此外,本申请的标定装置对六维测力台进行一次固定并通过拉压传感器在组合导轨和十字导轨上的位置调整,即可实现六维测力台的免拆标定,易于操作,且其结构具有易于实施的特点,有利于控制制造成本。对应的,本申请还提供基于可移式电动缸的六维测力台标定方法,通过对拉力传感器和压力传感器进行控制,使提供的标定力与传感器的信号成线性关系,标定结果误差小,工作效率高。
对于标定装置而言,本申请的技术方案为:
基于可移式电动缸的六维测力台标定装置,包括:机架和设于所述机架上部的测力组件以及设于所述机架中部台面上的标定组件;所述台面将所述机架分隔为上机架和下机架,所述台面和所述上机架之间形成测力标定区;所述上机架的内侧设有可上下滑动的组合导轨,且所述组合导轨通过设于所述机架上的提升气缸实现在所述上机架上的上下移动调节,所述上机架的顶部固定设有十字导轨;所述测力组件包括相互配合并作用于所述标定组件上的第一测力传感器件和第二测力传感器件,所述第一测力传感器件可滑动地设于所述组合导轨上,所述第二测力传感器件可滑动地设于所述十字导轨上,两者通过电动缸独立驱动工作;所述标定组件包括:标定台以及设设于所述标定台上的受力架,所述标定台设于所述台面上。
本发明方案相对于现有技术的有益效果在于:可通过计算机控制第一测力传感器件和第二测力传感器件的相互配合,摒弃传统人工固定砝码的操作,有效减少人工操作造成的系统误差;可移动式电动缸分别控制第一测力传感器件在组合导轨上的滑动结合第二测力传感器件实现x轴和y轴力标定的调整,以及控制第二测力传感器件在十字导轨上的滑动并结合第一测力传感器件实现z轴力标定的调整,从而只需对标定组件进行一次装夹固定,无需对其进行重复拆卸和调整,即可实现对六维测力台的标定工作,此过程由于六维测力台为固定不动,通过测力组件的调整实现标定,过程中只有测力传感器件需要移动,系统误差小,同时,有效减少由于安装拆卸过程中造成的误差;通过电动缸施加连续且可调节的线性力,提高输入和输出之间的拟合线性关系准确度,有效提高标定效率;此外,本发明装置的结构设计具有易于实施的特点,有利于降低标定装置的制造成本。
作为优化,上机架和下机架为一体成型,或所述下机架可拆卸地置于上机架上;所述上机架的内侧开设有用于所述组合导轨滑动的侧滑轨,所述上机架的顶部开设有用于所述十字导轨滑动的顶滑轨,所述组合导轨的一端通过夹持滑块滑动设于所述侧滑轨上,其另一端与所述提升气缸连接实现对所述组合导轨的支撑,所述十字导轨对称的两端通过顶滑块滑动设于所述顶滑轨上。
在本发明技术方案中,上机架和下机架对整体结构起到支撑的作用,结合台面的设置有效地减少了整体空间占用,同时将十字导轨和组合导轨安装设于机架上,提高了其测力标定时的稳定性;另外,顶滑轨用于十字导轨的滑动和调节,侧滑轨和提升气缸的配合在不同高度尺寸的标定组件测力标定时能进行调节,使标定结果准确度更高。
作为优化,所述组合导轨包括呈垂直状布置的两段直形轨,以及连接两段直形轨的弧形轨;其中一段直形轨的外端固定设于所述上机架的夹持滑块内,另一段直形轨的外端固定设有限位块。
在本发明技术方案中,组合导轨包括的直形轨和弧形轨使其两侧的直形轨呈垂直角度,第一测力传感器件在组合导轨上能够从x轴方向滑动至y轴方向,且在侧力标定过程中无需对标定组件进行拆卸即可实现方向的90度转换,标定过程方便,用户操作使用简单。
作为优化,所述第一测力传感器件包括用于检测六维测力台水平方向数据的水平拉力传感器和水平压力传感器;所述第二测力传感器件包括用于检测六维力传感竖直方向数据的竖直拉力传感器和竖直压力传感器。
在本发明技术方案中,拉力传感器和压力传感器均为高精度传感器,提高测力标定结果的准确度,两者通过电动缸实现拉压工作,标定过程线性程度高,标定数据点密集,能提高标定结果的准确度且电动缸能实现不同力大小的线性调节,相较于传统的人工固定砝码其效率更高。
作为优化,所述标定台包括测力平台和限位平台,所述测力平台限位设于所述限位平台上,所述受力架固定设于所述测力平台上,所述限位平台上端两边固定设有两个及以上的限位件,其另外两边设有两个及以上与所述限位件对应的夹具,夹具作用于所述测力平台的两边并使所述测力平台限位抵靠在所述限位件上;所述限位平台和所述测力平台之间还设置有用于将所述限位平台下压限位在所述测力平台上的下压夹具。
在本发明技术方案中,测力平台和限位平台均用于限位固定受力架,在标定的全部过程中保持测力平台和限位平台为固定位置处,通过测力组件的角度调整进行标定,避免其在测力标定过程由于晃动或位移或旋转调整而造成标定结果误差,夹具和限位件的对应配合实现测力平台在限位平台上的x轴和y轴平面内的限位固定,通过下压夹具实现z轴平面内的限位固定,便于受力架及测力平台的装卸且整体的限位固定效果好。
作为优化,所述受力架的外侧呈“十”字向外延伸并分别形成有两个拉槽和两个压槽,拉槽和压槽对称设于所述受力架的两侧,所述拉槽和所述压槽在测量与所述测力组件配合;所述受力架的中部上端面设有吊环。
在本发明技术方案中,拉槽和压槽的开设使第一测力传感器件和第二传感器件作用于受力架上,对称设置的结构能够使受力件两侧的受力均匀,减少标定误差;吊环的设置用于z轴方向的力进行标定,占用空间少,整体的结构简单。
作为优化,所述水平拉力传感器的一端设有拉钩且在测量时与所示受力架的拉槽配合,水平压力传感器的一端设有压块在测量时与所示受力架的压槽配合;第二测力传感器件的结构与第一测力传感器件的结构相同。
在本发明技术方案中,拉钩与拉槽配合实现对受力架的拉力作用,压块和压槽配合实现对受力架的压力作用,通过拉力传感器器和压力传感器分别在组合导轨和十字导轨上的移动调节实现测力标定,整体结构设置合理。
本发明还提供了基于可移式电动缸的六维测力台标定方法,采用上述基于可移式电动缸的六维测力台标定装置实现,具体如下:
将标定组件固定限位设于机架上,使受力架位于十字导轨的中轴线位置处;驱动提升气缸使组合导轨与受力架在同一标定高度并使压块与压槽在同一水平面上;驱动竖直拉力传感器作用于受力架的吊环上,实现对六维测力台F
与现有技术相比,本发明基于可移式电动缸的六维测力台标定方法在对六维测力台的标定过程中,其提供的标定力与拉力传感器及压力传感器的信号成线性关系,能够通过信号输入直接控制电动缸工作提供所需的标定力,无需人工反复搬运砝码,减少人力成本提高标定效率;并且通过拉力传感器和压力传感器在组合导轨及十字导轨上的移动调节实现不同方向的测力标定,无需拆卸标定组件,结合电动缸提供的线性力,使标定结构准确度高。
作为优化,标定F
在本发明技术方案中,对F
作为优化,标定M
在本发明技术方案中,拉槽和拉钩配合,压槽和压块配合,且拉力传感器作用于拉槽的拉力方向以及压力传感器作用于压槽的压力方向相反,从而实现对受力架不同方向的力矩标定,标定过程方便,标定结果误差小。
附图说明
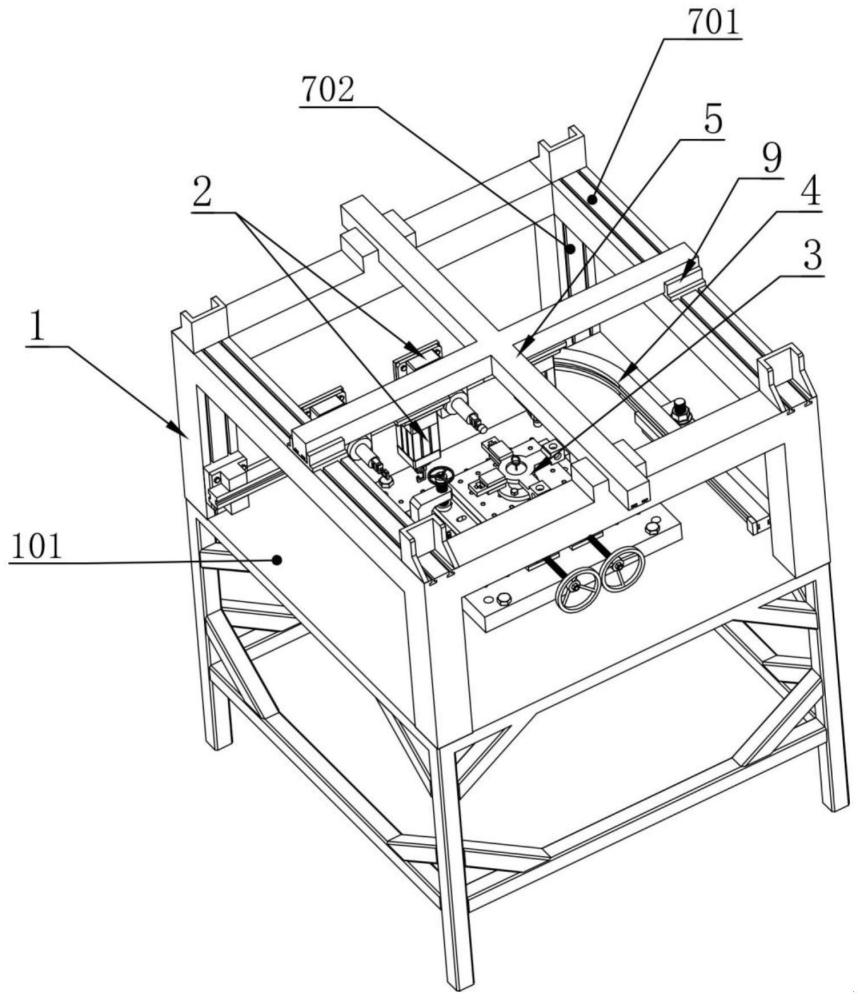
图1是本申请的立体图;
图2是本申请的侧视图;
图3是本申请的俯视图;
图4是本申请除去上机架的俯视图;
图5是本申请下机架和标定组件的立体图;
图6是本申请A处放大图;
图7是本申请上机架和测力组件的立体图。
附图中的标记为:1-机架,101-台面,102-上机架,103-下机架;2-测力组件,201-第一测力传感器件,211-水平拉力传感器,221水平压力传感器,202-第二测力传感器件,212-竖直拉力传感器,222-竖直压力传感器;3-标定组件,301-标定台,311-测力平台,321-限位平台,302-受力架,312-拉槽,322-压槽;4-组合导轨,401-直形轨,402-弧形轨;5-十字导轨;6-提升气缸;701-侧滑轨,702-顶滑轨;8-夹持滑块,801为限位槽;9-顶滑块;10-限位块;11-限位件;12-夹具;13-下压夹具;14-吊环;1501-拉钩,1502-压块;16-支撑架。
具体实施方式
下面结合附图和实施例对本申请作进一步的说明,但并不作为对本申请限制的依据。
实施例
参阅图1~图7,基于可移式电动缸的六维测力台标定装置,包括:机架1和设于机架1上部的测力组件2以及设于机架1中部台面101上的标定组件3;台面101将机架1分隔为上机架102和下机架103,台面101和上机架102之间形成测力标定区;上机架102的内侧设有可上下滑动的组合导轨4,且组合导轨4通过设于机架1上的提升气缸6实现在上机架102上的上下移动调节,上机架102的顶部固定设有十字导轨5;测力组件2包括相互配合并作用于标定组件3上的第一测力传感器件201和第二测力传感器件202,第一测力传感器件201可滑动地设于组合导轨4上,第二测力传感器件202可滑动地设于十字导轨5上,两者通过电动缸独立驱动工作;标定组件3包括:标定台301以及设设于标定台301上的受力架302,标定台301设于台面101上。
由此,下机架103可拆卸地置于上机架102上,第一测力传感器件201包括用于检测六维测力台水平方向数据的水平拉力传感器211和水平压力传感器221;第二测力传感器件202包括用于检测六维力传感竖直方向数据的竖直拉力传感器212和竖直压力传感器222。
本实施例中,上机架102的内侧开设有用于组合导轨4滑动的侧滑轨701,上机架102的顶部开设有用于十字导轨5滑动的顶滑轨702,组合导轨4的一端通过夹持滑块8滑动设于侧滑轨701上,其另一端与提升气缸6连接实现对组合导轨4的支撑,十字导轨5对称的两端通过顶滑块9滑动设于顶滑轨702上。
由此,上机架102和下机架103对整体结构起到支撑的作用,结合台面101的设置有效地减少了整体空间占用,同时将十字导轨5和组合导轨4安装设于机架1上,提高了其测力标定时的稳定性;另外,顶滑轨702用于十字导轨5的滑动和调节,侧滑轨701和提升气缸6的配合在不同高度尺寸的标定组件测力标定时能进行调节,使标定结果准确度更高。
本实施例中,组合导轨4包括呈垂直状布置的两段直形轨401,以及连接两段直形轨401的弧形轨402;其中一段直形轨401的外端固定设于上机架102的夹持滑块8内,另一段直形轨401的外端固定设有限位块10。
由此,直形轨401分别于弧形轨402的两端通过螺丝固定连接,两段的直形轨401上均标记有中心刻度位0,两段直形轨各自分别从中心刻度位向两侧延伸标记有挂钩刻度位置A1、A2和压块刻度位置B1、B2,直行导轨5的中心位置为中心刻度位0,且向四个方向延伸标记有A3、B3、C1、D1,中心刻度位0与受力架302的中心位置对应,手动推动测力组件分别至对应的刻度位实现对六维测力台的标定(也可以通过在测力组件上设置位移传感器,用于确定测力组件的位置);提升气缸6和直形轨401的下端通过支撑架16连接固定并对组合导轨4起到支撑作用,夹持滑块8上设有C型的限位槽801,组合导轨4的一端设于限位槽801内并通过限位槽801和组合导轨4的配合带动限位块10在侧滑轨701上的上下调节滑动。
本实施例中,标定台301包括测力平台311和限位平台321,测力平台311限位设于限位平台321上,受力架302固定设于测力平台311上,限位平台321上端两边固定设有两个及以上的限位件11,其另外两边设有两个及以上与限位件11对应的夹具12,夹具12作用于测力平台311的两边并使测力平台311限位抵靠在限位件11上;限位平台321和测力平台311之间还设置有用于将限位平台321下压限位在测力平台311上的下压夹具13。
由此,测力平台311和限位平台321均用于限位固定受力架302,避免其在测力标定过程由于晃动或位移而造成标定结果误差,夹具12和限位件11的对应配合实现测力平台在限位平台321上的x轴和y轴平面内的限位固定,通过下压夹具13实现z轴平面内的限位固定,便于受力架302及测力平台311的装卸且整体的限位固定效果好。
本实施例中,受力架302的外侧呈“十”字向外延伸并分别形成有两个拉槽312和两个压槽322,拉槽312和压槽322对称设于受力架302的两侧,拉槽312和压槽322在测量与测力组件2配合;受力架302的中部上端面设有吊环14。
由此,水平拉力传感器211的一端设有拉钩1501且在测量时与所示受力架302的拉槽312配合,水平压力传感器221的一端设有压块1502在测量时与所示受力架302的压槽322配合;第二测力传感器件202的结构与第一测力传感器件201的结构相同。
本实施例通过计算机控制第一测力传感器件和第二测力传感器件的相互配合,摒弃传统人工固定砝码的操作,有效减少人工操作造成的系统误差;可移动式电动缸分别控制第一测力传感器件在组合导轨上的滑动结合第二测力传感器件实现x轴和y轴力标定的调整,以及控制第二测力传感器件在十字导轨上的滑动并结合第一测力传感器件实现z轴力标定的调整,从而只需实现对标定组件的进行一次装夹固定,无需对其进行重复拆卸和调整,即可实现对六维测力台的标定工作,此过程六维测力台为固定不动,通过测力组件的位置调整进行标定;通过电动缸施加连续且可调节的线性力,提高输入和输出之间的拟合线性关系准确度,并有效提高标定效率。
实施例
参阅图1~图7,基于可移式电动缸的六维测力台标定方法,采用基于可移式电动缸的六维测力台标定装置实现,具体如下:将标定组件3固定限位设于机架1上,使受力架302位于十字导轨5的中轴线位置处;驱动提升气缸6使组合导轨6与受力架302在同一标定高度并使压块1502与压槽322在同一水平面上;驱动竖直拉力传感器212作用于受力架302的吊环14上,实现对六维测力台F
由此,在标定z轴方向力、y轴方向的力、x轴方向的力、x轴方向力矩、y轴方向力矩、z轴方向力矩时,不限制标定的顺序且不同的力之间均为独立测定。
本实施例中,标定F
由此,对F
本实施例中,标定M
本实施例在对六维测力台的标定过程中,其提供的标定力与拉力传感器及压力传感器的信号成线性关系,能够通过信号输入直接控制电动缸工作提供所需的标定力,无需人工反复搬运砝码,减少人力成本提高标定效率;并且通过拉力传感器和压力传感器在组合导轨及十字导轨上的移动调节实现不同方向的测力标定,无需拆卸标定组件,结合电动缸提供的线性力,使标定结构准确度高。
上述对本申请中涉及的发明的一般性描述和对其具体实施方式的描述不应理解为是对该发明技术方案构成的限制。本领域所属技术人员根据本申请的公开,可以在不违背所涉及的发明构成要素的前提下,对上述一般性描述或/和具体实施方式(包括实施例)中的公开技术特征进行增加、减少或组合,形成属于本申请保护范围之内的其它的技术方案。