一种配电带电作业机器人用的机械手和绝缘遮蔽方法
文献发布时间:2024-01-17 01:27:33
【技术领域】
本发明展示了一种配电带电作业机器人用的机械手和绝缘遮蔽方法,属于带电作业机器人技术领域。
【背景技术】
机械手是一种广泛应用于带电作业机器人的设备,这种设备不仅工作时间长、工作效率高而且其能够替代工作人员进行高空作业,能够有效提高工作人员的作业安全性,因此发挥着越来越重要的作用。机械手的夹取一般是通过驱动器带动拉绳收缩,从而控制机械手指弯曲,实现对物品的夹取,机械手的释放一般是通过弹性件使机械手指回弹至释放状态,中国发明专利(CN103612264A)中公开了一种机械手指及机械手,包括第一连接件、第一指段、第二指段、第一弹性件、第二弹性件和拉线,拉线一端与驱动装置连接,另一端与第二指段固定,当拉线的作用力克服弹簧的作用力后,第一指段和第二指段便能够转动至夹取状态,失去驱动器的作用后,第一弹性件和第二弹性件能够使第一指段和第二指段自动展开,切换至释放状态,但是该专利中机械手进行抓取时驱动器需要克服弹性件的作用力,会增加驱动器的能量消耗,另外机械手的展开依靠弹性件的作用力,当弹性件受损时则会导致机械手无法正常使用,降低机械手的使用寿命。
【发明内容】
本发明的目的在于解决现有机械手能量消耗大且使用寿命低的问题,为此提供了一种配电带电作业机器人用的机械手和绝缘遮蔽方法,能够节约驱动器的能量消耗。
解决上述技术问题,本发明采用如下技术方案:
一种配电带电作业机器人用的机械手,包括基座以及至少两个设置于基座且具有夹取状态和释放状态的机械手指,机械手指包括驱动器、相对基座固定的固定指段、以及与固定指段转动连接的转动指段,驱动器的输出端上设有绕线轮,绕线轮缠绕有使机械手指切换至夹取状态的第一线缆和使机械手指切换至释放状态的第二线缆,第一线缆和第二线缆在输出端上的缠绕方向相反,第一线缆和第二线缆均连接于转动指段,转动指段与固定指段的连接处设有分别供第一线缆和第二线缆缠绕的第一滑轮和第二滑轮、以及用于安装第一滑轮和第二滑轮的转轴,第一线缆和第二线缆的缠绕方向相反。
采用本发明的有益效果是:
本发明中所述驱动器的输出端缠绕有第一线缆和第二线缆,转动指段与固定指段的连接处设有第一滑轮和第二滑轮,驱动器控制输出端转动从而带动第一线缆和第二线缆运动,由于第一线缆和第二线缆在输出端上的缠绕方向相反,因此当驱动器对第一线缆进行牵拉时,输出端上的第二线缆被松开,此时第一线缆拉动转动指段,使转动指段绕固定指段向内转动,即机械手指切换至夹取状态,同样的当驱动器对第二线缆进行牵拉时,输出端上的第一线缆被松开,此时第二线缆拉动转动指段,使转动指段绕固定指段向外转动,即机械手指切换至释放状态,本发明通过驱动器分别驱动第一线缆和第二线缆,便能够实现机械手指夹取状态和释放状态的切换,无需设置弹性件,即驱动器控制机械手指进行夹取时无需克服弹性件的作用力,可以节约驱动器的能量消耗,同时也可以节省机械手指的制作成本;另外由于可以省去弹性件的设置,因此机械手指可以仅靠驱动器将机械手指切换至释放状态,提高机械手指状态切换的稳定性,同时也有利于提高本发明的使用寿命。
作为优选,所述转动指段包括指面和指背,第一线缆在第一滑轮上的交叉位置靠近转动指段的指面,第二线缆在第二滑轮上的交叉位置靠近转动指段的指背。采用前述技术方案,当第一线缆被牵拉时,第一线缆会带动转动指段靠近第一线缆在第一滑轮上的交叉位置,使转动指段绕固定指段朝向指面的方向转动,即转动指段向内转动使机械手指切换至夹取状态;当第二线缆被牵拉时,第二线缆会带动转动指段靠近第二线缆在第二滑轮上的交叉位置,使转动指段绕固定指段朝向指背的方向转动,即转动指段相外转动使机械手指切换至释放状态。
作为优选,所述转动指段内设有第一固定件和第二固定件,第一线缆通过第一固定件连接于转动指段靠近指面的一侧,第二线缆通过第二固定件连接于转动指段靠近指背的一侧。采用前述技术方案,可以使第一线缆和第二线缆的固定位置分别靠近第一线缆和第二线缆的交叉位置,使第一线缆和第二线缆在转动指段内的长度保持较短,可以节省第一线缆和第二线缆的长度。
作为优选,所述第一固定件转动连接于转动指段,第一固定件转动改变转动指段与固定指段之间的夹角。采用前述技术方案,通过转动第一固定件可以调节第一线缆的松紧度,即可以调节机械手的合拢程度,工作人员可以根据夹取物品的大小,将机械手指之间的间距调整至合适的大小,使本发明抓取和释放物品时,驱动器所需运行的距离保持较小,进一步降低驱动器所消耗的能量,可以降低本发明的使用成本。
作为优选,所述第一固定件包括露出于转动指段表面的调节面、以及与转动指段形成螺纹自锁的锁定端。采用前述技术方案,调节面露出于转动指段表面,可以使第一固定件的调节更加方便省力;锁定端可以与转动指段形成螺纹自锁,降低第一固定件随意发生转动的可能性。
作为优选,所述转动指段包括指尖段和至少一个连接段,连接段与固定指段、连接段与指尖段以及相邻两个连接段均转动连接。采用前述技术方案,通过增设未限定数量和长度的连接段,一方面可以增加转动指段的长度,提高机械手指的夹取范围;另一方面也能够进一步增加转动指段与被夹取物体之间接触面,同时形成最佳的握持角度,以便能够更稳定地夹取更多不规则物品,提高了机械手指的运动自由度和夹取应用范围。
作为优选,所述指尖段与连接段以及相邻两个连接段之间均设有转轴,转轴上转动连接有第一滑轮和第二滑轮。
作为优选,所述绕线轮包括用于缠绕第一线缆的第一线槽和用于缠绕第二线缆的第二线槽。采用前述技术方案,第一线槽和第二线槽能够分别对第一线缆和第二线缆进行收纳,可以避免第一线缆和第二线缆发生缠绕,使第一线缆和第二线缆保持独立运行,提高转动指段的运动稳定性。
作为优选,所述固定指段朝向绕线轮的一侧设有用于引导第一线缆的第一通孔和用于引导第二线缆的第二通孔。采用前述技术方案,第一通孔和第二通孔能够分别对第一线缆和第二线缆进行引导,使第一线缆和第二线缆保持独立运行,防止第一线缆和第二线缆发生缠绕。
本发明还展示了一种绝缘遮蔽方法包括绝缘斗臂车,绝缘斗臂车设有工作斗、控制设备、调节装置和安装在调节装置末端的机械手,工作斗上设有用于存放绝缘遮蔽罩的存放台,控制设备包括雷达模块、标注模块和计算模块,绝缘遮蔽方法包括:
S1、所述雷达模块对作业环境进行扫描从而获取目标作业点所在作业环境的三维坐标系,并利用标注模块对作业环境中需要绝缘遮蔽的作业点进行标注;
S2、计算模块根据步骤S1中的目标作业点以及检测作业点的指令,计算出作业点所需加装绝缘遮蔽罩的规格、数量和使用顺序;
S3、计算模块以S2中绝缘遮蔽罩的使用规格、数量和使用顺序为目标,根据相应绝缘遮蔽罩在存放台上的位置,计算出机械手运动至存放台上相应绝缘遮蔽罩上方的运动路径和运动指令;
S4、处理器将步骤S3的运动指令通过无线通信模块发送给调节装置,调节装置接收到运动指令后将机械手移动至相应绝缘遮蔽罩的存放位置;
S5、处理器根据步骤S3中绝缘遮蔽罩的使用顺序生成抓取指令,并将抓取指令通过无线通信模块发送给调节装置,调节装置收到抓取指令后控制机械手依照使用顺序完成相应绝缘遮蔽罩的抓取动作;
S6、计算模块根据步骤S1中的目标作业点及加装绝缘遮蔽罩的指令,计算出调节装置的运动路径并生成遮蔽指令;
S7、处理器将步骤S6中的遮蔽指令通过无线通信模块发送给调节装置,调节装置接收到遮蔽指令后控制机械手将已抓取到的绝缘遮蔽罩移动至目标作业点;
S8、处理器根据步骤S2中绝缘遮蔽罩的使用顺序生成释放指令,并将释放指令通过无线通信模块发送给机械手,机械手根据释放指令执行完成相应设置顺序的绝缘遮蔽罩在目标作业点上的释放动作;
S9、绝缘遮蔽罩释放动作完成后,循环执行步骤S4到S8的抓取绝缘遮蔽罩和释放绝缘遮蔽罩动作,完成对目标作业点剩余绝缘遮蔽罩的加装。
本发明的其他特点和优点将会在下面的具体实施方式、附图中详细的揭露。
【附图说明】
下面结合附图对本发明做进一步的说明:
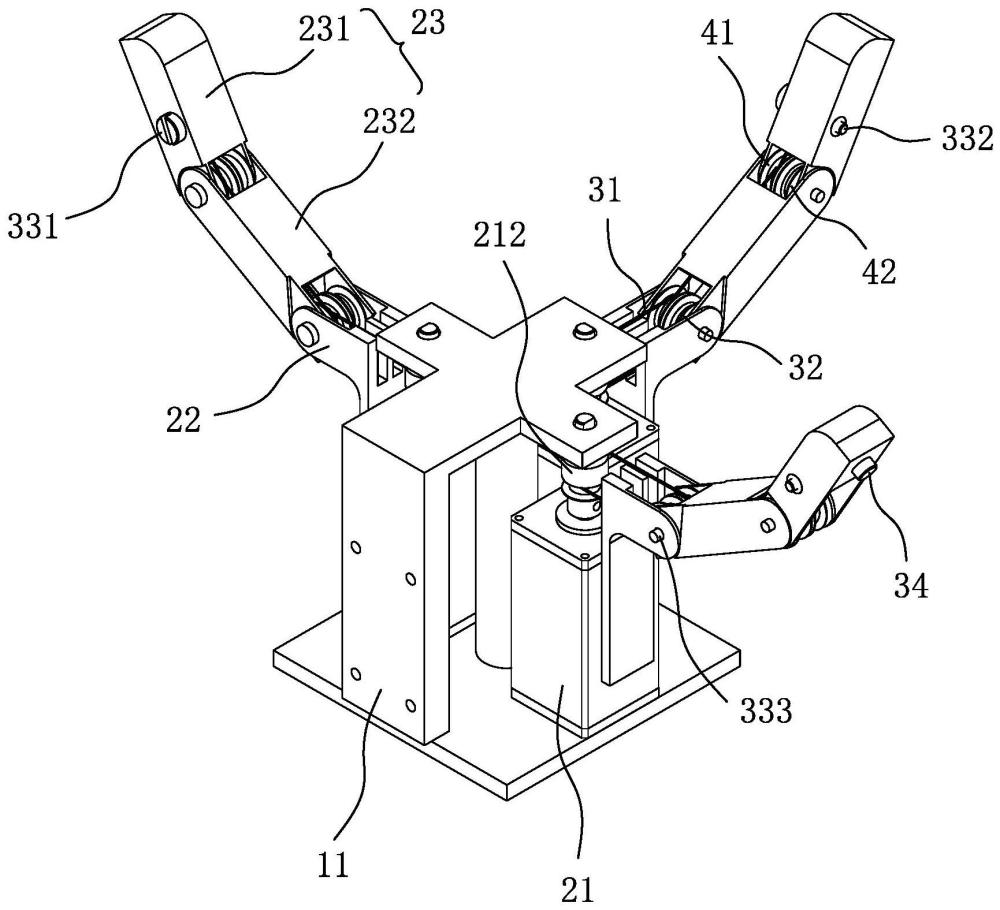
图1为本发明一种配电带电作业机器人用的机械手的结构示意图;
图2为本发明一种配电带电作业机器人用的机械手中机械手指的爆炸示意图;
图3为本发明一种配电带电作业机器人用的机械手中机械手指的侧视图;
图4为本发明一种配电带电作业机器人用的机械手中机械手指的俯视图;
图5为本发明一种配电带电作业机器人用的机械手中第一线缆和第二线缆的缠绕示意图;
图6为本发明一种配电带电作业机器人用的机械手与调节装置的连接结构示意图;
图7为带有本发明中末端机械手的斗臂车的示意图;
图8为图7中工作斗处的放大示意图;
图9为本发明中绝缘斗臂车进行绝缘遮蔽的示意图;
图10为本发明中调节装置的示意图;
图11为本发明中一级升降机构及水平旋转机构的爆炸图;
图12为本发明中水平旋转机构的爆炸图;
图13为本发明中直线驱动组件的结构图;
图14为本发明中支撑机构及二级升降机构的爆炸图;
图15为本发明中控制设备的示意图。
附图标记:1机械手、11基座、2机械手指、21驱动器、211输出端、212绕线轮、2121第一线槽、2122第二线槽、22固定指段、221第一通孔、222第二通孔、23转动指段、231指尖段、232连接段、31第一线缆、32第二线缆、33第一固定件、331调节面、332锁定端、333转轴、34第二固定件、41第一滑轮、42第二滑轮、5调节装置、51一级升降机构、511一级立柱、512一级升降轴、513一级升降驱动件、52水平旋转机构、521旋转臂、5211凹槽、5212限位块、522旋转电机、523移动臂、5231定位槽、524传动头、525直线驱动组件、5251直线驱动件、5252丝杆、5253滑块、5254支撑座、5255导轨、526第二无线接收单元、527支架、53支撑机构、531支撑杆、532支撑气缸、533绝缘套、534铰接座、54二级升降机构、541二级立柱、542二级升降轴、543二级升降驱动件、544座体、545第三无线接收单元、546支座、547作业臂、6斗臂车、61控制台、611遥控器、62转盘、63伸缩杆、64工作斗、65存放台、651存放槽、82绝缘遮蔽罩、9控制设备、91处理器、92雷达模块、921三维激光雷达单元、922面阵激光雷达单元、93标注模块、931激光发射单元、932激光接收单元、933光电处理单元、934操作单元、94计算模块、95无线通信模块、96遥控模块、961显示屏、962遥控按键、97摄像模块、98防碰撞模块、981检测单元。
【具体实施方式】
下面结合本发明实施例的附图对本发明实施例的技术方案进行解释和说明,但下述实施例仅为本发明的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得其他实施例,都属于本发明的保护范围。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
如图1至图6所示,本实施例展示了一种配电带电作业机器人用的机械手1,包括基座11以及至少两个设置于基座11且具有夹取状态和释放状态的机械手指2,机械手指2包括驱动器21、相对基座11固定的固定指段22、以及与固定指段22转动连接的转动指段23,驱动器21的输出端211缠绕有使机械手指2切换至夹取状态的第一线缆31和使机械手指2切换至释放状态的第二线缆32,第一线缆31和第二线缆32在输出端211上的缠绕方向相反,第一线缆31和第二线缆32均连接于转动指段23,转动指段23与固定指段22的连接处设有分别供第一线缆31和第二线缆32缠绕的第一滑轮41和第二滑轮42,第一线缆31和第二线缆32的缠绕方向相反。
本实施例中所述驱动器21的输出端211缠绕有第一线缆31和第二线缆32,转动指段23与固定指段22的连接处设有第一滑轮41和第二滑轮42,驱动器21控制输出端211转动从而带动第一线缆31和第二线缆32运动,由于第一线缆31和第二线缆32在输出端211上的缠绕方向相反,因此当驱动器21对第一线缆31进行牵拉时,输出端211上的第一线缆31被拉紧,第二线缆32被松开,此时第一线缆31拉动转动指段23,使转动指段23绕固定指段22向内转动,即机械手指2切换至夹取状态,同样的当驱动器21对第二线缆32进行牵拉时,输出端211上的第一线缆31被松开,第二线缆32被拉紧,此时第二线缆32拉动转动指段23,使转动指段23绕固定指段22向外转动,即机械手指2切换至释放状态,本实施例通过驱动器21分别驱动第一线缆31和第二线缆32,便能够实现机械手指2夹取状态和释放状态的切换,无需设置弹性件,即驱动器21控制机械手指2进行夹取时无需克服弹性件的作用力,可以节约驱动器21的能量消耗,同时也可以节省机械手指2的制作成本;另外由于可以省去弹性件的设置,因此机械手指2可以仅靠驱动器21将机械手指2切换至释放状态,提高机械手指2状态切换的稳定性,同时也有利于提高本实施例的使用寿命。
如图2和图5所示,本实施例中所述转动指段23包括指面和指背,机械手指2运动至夹取状态时,转动指段23绕固定指段22朝指面的方向进行转动,即向内转动;机械手指2运动至释放状态时,转动指段23绕固定指段22朝指背的方向进行转动,即向外转动;如图2所示,本实施例中第一线缆31在第一滑轮41上的交叉位置靠近转动指段23的指面,第二线缆32在第二滑轮42上的交叉位置靠近转动指段23的指背,当第一线缆31被牵拉时,会使第一线缆31紧绷并减小第一线缆31在转动指段23内的长度,因此第一线缆31会带动转动指段23靠近第一线缆31在第一滑轮41上的交叉位置,从而使转动指段23绕固定指段22朝向指面的方向转动,即转动指段23向内转动使机械手指2切换至夹取状态;当第二线缆32被牵拉时,会使第二线缆32紧绷并减小第二线缆32在转动指段23内的长度,因此第二线缆32会带动转动指段23靠近第二线缆32在第二滑轮42上的交叉位置,使转动指段23绕固定指段22朝向指背的方向转动,即转动指段23相外转动使机械手指2切换至释放状态。
如图2和图3所示,本实施例中所述转动指段23内设有第一固定件33和第二固定件34,第一线缆31通过第一固定件33连接于转动指段23靠近指面的一侧,第二线缆32通过第二固定件34连接于转动指段23靠近指背的一侧,可以使第一线缆31和第二线缆32的固定位置分别靠近第一线缆31和第二线缆32的交叉位置,使第一线缆31和第二线缆32在转动指段23内的长度保持较短,可以节省第一线缆31和第二线缆32的长度。
另外本实施例中所述第一固定件33转动连接于转动指段23,第一固定件33包括露出于转动指段23表面的调节面331、以及与转动指段23形成螺纹自锁的锁定端332,通过转动第一固定件33可以调节第一线缆31的松紧度,当第一线缆31更加紧绷时,会减小第一线缆31在转动指段23内部的长度,使第一固定件33更加靠近第一线缆31在第一滑轮41上的交叉位置,使机械手指2之间的间距更小;而当第一线缆31更加松弛时,可以增大第一线缆31在转动指段23内部的长度,使第一固定件33更加远离第一线缆31在第一滑轮41上的交叉位置,使机械手指2之间的间距更大,即第一固定件33可以调节机械手1的合拢程度,工作人员可以根据夹取物品的大小,将机械手指2之间的间距调整至合适的大小,使本实施例抓取和释放物品时,驱动器21所需运行的距离保持较小,进一步降低驱动器21所消耗的能量,可以降低本实施例的使用成本;另外调节面331露出于转动指段23表面,可以使第一固定件33的调节更加方便省力;锁定端332可以与转动指段23形成螺纹自锁,降低第一固定件33随意发生转动的可能性。
如图3和图4所示,本实施例中所述转动指段23与固定指段22的连接处设有转轴333,第一滑轮41和第二滑轮42均转动连接在转轴333上,转轴333可以使第一滑轮41和第二滑轮42的定位更加稳定,为第一线缆31和第二线缆32的运动提供稳定的引导。
如图2和图3所示,本实施例中所述转动指段23包括指尖段231和一个连接段232,连接段232与固定指段22、连接段232与指尖段231以及相邻两个连接段232均转动连接,指尖段231与连接段232以及相邻两个连接段232之间均设有转轴333,转轴333上转动连接有第一滑轮41和第二滑轮42,通过增设未限定数量和长度的连接段232,一方面可以增加转动指段23的长度,提高机械手指2的夹取范围;另一方面也能够进一步增加转动指段23与被夹取物体之间接触面,同时形成最佳的握持角度,以便能够更稳定地夹取更多不规则物品,提高了机械手指2的运动自由度和夹取应用范围。当然可以理解的,在其他实施例中所述转动指段23也可以仅包括指尖段231,或者可以设置两个或两个以上的连接段232。
本实施例中所述驱动器21固定于基座11,基座11上设有三个机械手指2;需要说明的是,在其他实施例中所述基座11上也可以是仅设置两个机械手指2,或者也可以是设置四个或者四个以上的机械手指2,机械手指2的驱动器21固定安装在基座11上,固定指段22与驱动器21固定连接,驱动器21的输出端211设有绕线轮212,绕线轮212包括用于缠绕第一线缆31的第一线槽2121和用于缠绕第二线缆32的第二线槽2122,第一线缆31和第二线缆32的部分均预先缠绕在绕线轮212上;当然可以理解,在他实施例中也可以是仅第一线缆31预先缠绕在绕线轮212上,此时机械手指2的初始状态为夹取状态;或者也可以是仅第二线缆32预先缠绕在绕线轮212上,此时机械手指2的初始状态为释放状态;所述第一线槽2121和第二线槽2122能够分别对第一线缆31和第二线缆32进行收纳,可以避免第一线缆31和第二线缆32发生缠绕,使第一线缆31和第二线缆32保持独立运行,提高转动指段23的运动稳定性。
如图2和图4所示,本实施例中所述固定指段22朝向绕线轮212的一侧设有用于引导第一线缆31的第一通孔221和用于引导第二线缆32的第二通孔222,第一通孔221和第二通孔222能够分别对第一线缆31和第二线缆32进行引导,使第一线缆31和第二线缆32保持独立运行,防止第一线缆31和第二线缆32发生缠绕。
如图7至图15所示,在一种实施例中还展示了一种绝缘斗臂车6,包括作业设备和控制设备9,所述作业设备包设有伸缩杆63、由伸缩杆63带动升降的调节装置5、由调节装置5带动移动的作业臂547、由作业臂547带动移动的机械手1,所述机械手采用上述实施例所述的电作业机器人的末端机械手1。所述控制设备9包括处理器91、雷达模块92、标注模块93、计算模块94、无线通信模块95及遥控模块96,雷达模块92、标注模块93、计算模块94、无线通信模块95及遥控模块96均信号连接于处理器91。
所述调节装置5连接于伸缩杆63的顶端由伸缩杆63带动升降,调节装置5包括依次设置的一级升降机构51、水平旋转机构52及二级升降机构54,作业臂547连接于二级升降机构54的顶端且由调节装置5带动移动。
如图10和图11所示,本实施例中所述一级升降机构51包括接头座、中空的一级立柱511、一级升降驱动件513及一级升降轴512,伸缩杆63采用多节伸缩式结构,接头座631固定于伸缩杆63的顶端,一级立柱511设于接头座631上,一级升降驱动件513及一级升降轴512设于一级立柱511中,一级升降轴512连接于一级升降驱动件513的输出端且由一级升降驱动件513带动升降,水平旋转机构52设于一级升降轴512上。本实施例中,一级升降驱动件513优选采用一级升降气缸,一级升降轴512的底端连接于一级升降气缸的活塞杆顶端。一级升降机构51还包括设于接头座631底部的第一无线接收单元及第一电池单元,一级升降驱动件513受控于第一无线接收单元,第一电池单元向一级升降驱动件513供电。第一无线接收单元接收到工作指令后命令一级升降驱动件513工作,执行上升或下降的动作;另外所述接头座处连接有工作斗64。
如图11所示,本实施例中所述水平旋转机构52包括旋转臂521及用于驱动旋转臂521水平旋转的旋转电机522,旋转臂521的一端通过轴承可水平转动的套设于一级升降轴512的顶端,旋转电机522通过支架527轴向竖直的固定于一级升降轴512的顶部,旋转电机522的电机轴底端通过传动头524连接于旋转臂521。旋转电机522工作时,电机轴通过传动头524带动旋转臂521进行水平旋转。
如图12所示,本实施例中为了扩大调节装置5的横向作业范围,水平旋转机构52还包括移动臂523与直线驱动组件525,移动臂523设于旋转臂521上,直线驱动组件525设于旋转臂521与移动臂523之间,直线驱动组件525可带动移动臂523沿旋转臂521的长度方向来回移动。旋转臂521上设有沿长度方向延伸的凹槽5211,凹槽5211的一端开口设置,移动臂523的局部及直线驱动组件525设于凹槽5211中。
如图13所示,本实施例中所述直线驱动组件525包括直线驱动件5251、由直线驱动件5251驱动的丝杆5252及套设于丝杆5252上的滑块5253,移动臂523连接于滑块5253。本实施例中,直线驱动组件525还包括支撑座5254和导轨5255,丝杆5252通过轴承可转动设于支撑座5254上,导轨5255固定于支撑座5254上且位于丝杆5252的下方,滑块5253通过螺纹配合套设于丝杆5252上的同时连接于滑块5253。直线驱动件5251工作时带动丝杆5252转动,丝杆5252转动带动滑块5253相对于导轨5255移动,滑块5253带动移动臂523沿旋转臂521的长度方向移动。
为了提高移动臂523的稳定性,移动臂523的侧壁上设有沿长度方向延伸的定位槽5231,凹槽5211的内壁上设有限位块5212,限位块5212位于定位槽5231中。通过限位块5212与定位槽5231的配合有效限制移动臂523的移动行程,也可以提高移动臂523的移动稳定性,避免移动臂523脱离旋转臂521。
水平旋转机构52还包括设于旋转臂521上的第二无线接收单元526及第二电池单元,旋转电机522及直线驱动件5251受控于第二无线接收单元526,第二电池单元向旋转电机522及直线驱动件5251供电。第二无线接收单元526接收到工作指令后命令旋转电机522或直线驱动件5251工作,执行相应动作。
如图14所示,二级升降机构54包括中空的二级立柱541、二级升降驱动件543及二级升降轴542,二级立柱541竖置且连接于水平旋转机构52,二级升降驱动件543及二级升降轴542设于二级立柱541中,二级升降轴542连接于二级升降驱动件543的输出端且由二级升降驱动件543带动升降。本实施例中,二级升降驱动件543优选采用二级升降气缸,二级升降轴542的底端与二级升降气缸的活塞杆的顶端连接。
二级升降机构54还包括第三无线接收单元545及第三电池单元,二级升降驱动件543受控于第三无线接收单元545,第三电池单元向二级升降驱动件543供电。第三无线接收单元545接收到工作指令后命令二级升降驱动件543工作,执行相应动作。二级立柱541的下端套设有座体544,第三无线接收单元545及第三电池单元设于座体544上。
为了提高调节装置5的结构稳定性,调节装置5包括设于水平旋转机构52与二级升降机构54之间的支撑机构53,支撑机构53包括可上下摆动的支撑杆531及用于固定支撑杆531的支撑气缸532,移动臂523的前端设有铰接座534,支撑杆531的底端及支撑气缸532缸体的底端均与铰接座534铰接,实现连接于水平旋转机构52。支撑杆531的顶端及支撑气缸532活塞杆的顶端均与座体544铰接,实现连接于二级升降机构54。支撑杆531连接于支撑气缸532的活塞杆,支撑杆531设有一对凸耳,凸耳上设有长孔,支撑气缸532活塞杆的外部通过套设有环形套,环形套的外部通过轴设有两个对称设置的滚轮,滚轮位于长孔中。为了提高操作的便捷性,也可以在支撑杆531的外部套设绝缘套533,作业人员可以通过绝缘套533握持住支撑杆531调节支撑杆531的倾斜幅度,调节完成后利用支撑气缸532撑住支撑杆531使支撑臂12保持固定。
支撑机构53还包括第四无线接收单元及第四电池单元,支撑气缸532受控于第四无线接收单元,第四电池单元向支撑气缸532供电。第四无线接收单元接收到工作指令后命令支撑气缸532工作,执行相应动作。本实施例中,第四无线接收单元及第四电池单元设于铰接座534上。
二级升降轴542的顶端通过轴承设有可水平转动的支座546,支座546上设有与作业臂547配合的孔,作业臂547通过与该孔配合穿设于支座546上,作业装置55设于作业臂547的前端。
作业设备整体安装在绝缘斗臂车上,绝缘斗臂车上设有可水平旋转的转盘62,伸缩杆63的底端通过气缸连接于转盘62,作业车辆上还设有用于操控设备的控制台61,所述控制台61内设有用于存放遥控器611的存放柜。为了使设备满足带电操作要求,除气缸、直线驱动组件525、电机、电池等为构件为非绝缘件外,其他构件都尽量采用高强度绝缘材料制成。
如图15所示,本实施例中所述雷达模块92包括三维激光雷达单元921与面阵激光雷达单元922,三维激光雷达单元921可以进行旋转采样而获取目标作业点所在作业环境的三维坐标系初步数据,面阵激光雷达单元922可以进行全固态面阵三维成像,获取目标作业点所在作业环境三维坐标系具体数据。
为了实现标注目的,标注模块93包括激光发射单元931、激光接收单元932、光电处理单元933及操作单元934,激光发射单元931与操作单元934设于操作杆上,激光接收单元932与光电处理单元933设于作业臂547上。本实施例中,激光发射单元931与操作单元934集成并设置在控制器内,激光接收单元932与光电处理单元933集成并设置在支座546上,激光发射单元931、激光接收单元932均与操作单元934无线通信连接,作业人员可以通过控制器操作标注模块93。激光发射单元931包括激光瞄准发射单元及制导激光发射单元931,标注时两者的发射方向指向同一焦点。标注时,作业人员手持操作杆,通过控制器打开激光发射单元931,其中,激光瞄准发射单元发出可见光供作业人员进行标注参考,制导激光发射单元931发出激光光波,激光光波照射到目标作业点上并反射,激光接收单元932将接收到的激光光波传送给光电处理单元933,光电处理单元933进行光电处理获得目标作业点的坐标点并将坐标点标注到目标作业点所在环境的三维坐标系中。
遥控模块96上设有遥控按键962,系统进行作业时,地面作业人员可以通过遥控模块96控制作业设备,如在出现故障等情况下控制调节装置中动力件的启停、作业装置55中各驱动电机的启停等。
为了便于地面作业人员获知具体的作业情况,控制设备9还设有还包括摄像模块97和显示屏961,摄像模块97设于作业臂547上,显示屏961设于遥控模块96上,摄像模块97实时拍摄作业装置55带动作业工具在目标作业点进行作业的过程并将拍摄画面通过无线通信模块95发送给遥控模块96并显示于显示屏961上。本实施例中,摄像模块97采用全彩摄像头,摄像模块97优选设于机械手1的基座11上并利用电池进行供电。
为了防止调节装置5在运动过程中与其他物体发生碰撞,控制设备9还包括防碰撞模块98,防碰撞模块98包括多个分布于调节装置5上的检测单元981,处理器91根据检测单元981反馈的信号判断调节装置5是否会发生碰撞并控制调节装置5的移动幅度。本实施例中,调节装置5的几个运动机构上均设有检测单元981,检测单元981可以采用电容感应型、超声波感应型、电磁波感应型、红外感应型等合适的传感器,也可以同时组合配置可检测生物体表面电荷的传感器。调节装置5运动时,红外传感器将感应信号发送给处理器91,处理器91根据红外传感器反馈的感应信号判断调节装置5的相关构件与其他物体之间的实际距离是否达到预设的安全距离,当实际距离达到预设安全距离时,处理器91作出使该运动机构的动力件停止运动的停止信号,处理器91将停止信号通过无线通信模块95发送给相关的动力件,该动力件接收到停止信号后停止运行,一方面可以进行障碍物规避,另一方面也可以检知作业人员,防止调节装置5失控伤及工作斗64内的作业人员,提高作业的安全性。同时,处理器91可以发出声电提醒信号,提醒作业人员调节装置5因可能发生碰撞而停止运行,以便作业人员及时作出处理,如采取清理障碍后继续作业、通过操作杆手动移动作业臂547将机械手1和作业工具移动至目标作业点处等措施。
如图9所示,在另一种实施例中提供了一种绝缘遮蔽方法,所述方法包括:
S1、所述雷达模块92对作业环境进行扫描获取目标作业点所在作业环境的三维坐标系,并利用标注模块93对作业环境中需要绝缘遮蔽的目标作业点进行标注;
S2、计算模块94根据步骤S1中的目标作业点以及检测目标作业点的指令,计算出目标作业点所需加装绝缘遮蔽罩82的规格、数量和使用顺序;
S3、计算模块94以S2中绝缘遮蔽罩82的使用规格、数量和使用顺序为目标,根据相应绝缘遮蔽罩82在存放台65上的位置,计算出机械手1运动至存放台65上相应绝缘遮蔽罩82上方的运动路径和运动指令;
S4、处理器91将步骤S3的运动指令通过无线通信模块95发送给调节装置5,调节装置5接收到运动指令后将机械手1移动至相应绝缘遮蔽罩82的存放位置;
S5、处理器91根据步骤S3中绝缘遮蔽罩82的使用顺序生成抓取指令,并将抓取指令通过无线通信模块95发送给调节装置5,调节装置5收到抓取指令后控制机械手1依照使用顺序完成相应绝缘遮蔽罩82的抓取动作;
S6、计算模块94根据步骤S1中的目标作业点及加装绝缘遮蔽罩82的指令,计算出调节装置5的运动路径并生成遮蔽指令;
S7、处理器91将步骤S6中的遮蔽指令通过无线通信模块95发送给调节装置5,调节装置5接收到遮蔽指令后控制机械手1将已抓取到的绝缘遮蔽罩82移动至目标作业点;
S8、处理器91根据步骤S2中绝缘遮蔽罩82的使用顺序生成释放指令,并将释放指令通过无线通信模块85发送给机械手1,机械手1根据释放指令执行完成相应设置顺序的绝缘遮蔽罩82在目标作业点上的释放动作;
S9、绝缘遮蔽罩82释放动作完成后,循环执行步骤S4到S8的抓取绝缘遮蔽罩82和释放绝缘遮蔽罩82动作,完成对目标作业点剩余绝缘遮蔽罩82的加装。
另外,步骤S1包括以下步骤,
S11、三维激光雷达单元921进行旋转采样,获取目标作业点所在作业环境的三维坐标系初步数据;
S12、面阵激光雷达单元922进行全固态面阵三维成像,获取目标作业点所在作业环境三维坐标系具体数据。
步骤S2中,光电处理单元933对激光接收单元932接收到的激光发射单元931照射到目标作业点反射的激光光波进行光电处理获得目标作业点的坐标点,并将坐标点标注在步骤S1获取的三维坐标系中。
步骤S4中,调节装置5移动过程中,检测单元981将感应信号反馈给处理器91,处理器91根据检测单元981反馈的信号判断调节装置5是否会发生碰撞并控制调节装置5的移动幅度。当实际距离达到预设安全距离时,处理器91作出使该运动机构的动力件停止运动的停止信号,处理器91将停止信号通过无线通信模块95发送给相关的动力件,该动力件接收到停止信号后停止运行,避免与其他物体发生碰撞。同时,处理器91发出提醒信号,提醒作业人员调节装置5停止运行,作业人员可以据此及时作出处理,如采取清理障碍后继续作业、或通过操作杆手动移动作业臂547将作业装置55和作业工具移动至目标作业点处等措施。
摄像模块97实时拍摄作业装置55带动作业工具在目标作业点进行作业的过程并将拍摄画面通过无线通信模块95发送给遥控模块96并显示于显示屏961上,地面作业人员可以观察显示屏961及时获知具体的作业情况,以便在出现故障时及时作出调整。
如图7至图9所示,本实施例中所述工作斗64上设有存放台65,存放台65与工作斗64滑动连接,存放台65上设有用于存放绝缘遮蔽罩82的存放槽651,斗臂车6对工作点进行绝缘遮蔽时,调节装置5控制机械手1移动至绝缘遮蔽罩82的上方,驱动器21运行带动绕线轮212转动,绕线轮212对第一线缆31进行牵拉,第一线缆31紧绷从而带动转动指段23向内转动,实现机械手指2对绝缘遮蔽罩82的夹取,之后调节装置5控制机械手1将绝缘遮蔽罩82对目标工作点进行绝缘遮蔽,最后驱动器21反向运行带动绕线轮212反向转动,绕线轮212对第二线缆32进行牵拉,第二线缆32紧绷从而带动转动指段23向外转动,实现机械手指2对绝缘遮蔽罩82的释放。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,熟悉该本领域的技术人员应该明白本发明包括但不限于附图和上面具体实施方式中描述的内容。任何不偏离本发明的功能和结构原理的修改都将包括在权利要求书的范围中。