一种基于群体智能的特高拱坝坝面三维快速建模方法
文献发布时间:2023-06-19 11:35:49
技术领域
本发明属于三维建模技术领域,特别涉及一种基于群体智能的特高拱坝坝面三维快速建模方法。
背景技术
传统的工程地形建设领域,对建筑进行三维建模时,通常采用人工进行测量,人力消耗大,测量效率低,再在三维建模软件上进行人工的草图绘制和模型渲染,建模时序长,工序复杂,不利于工期的有效控制,而且人工测量和绘制容易造成建模模型精度不足等严重问题。
发明内容
发明目的:为了克服现有技术中存在的问题,本发明提供一种基于群体智能的特高拱坝坝面三维快速建模方法,基于无人机倾斜摄影和三维激光扫描仪的基本原理,利用Context Capture软件,对特高拱坝坝面进行三维快速建模。
技术方案:为实现上述目的,本发明提供一种基于群体智能的特高拱坝坝面三维快速建模方法,包括如下步骤:
(1)数据准备:包括信息采集单元和飞行控制单元;
(2)数据传输:包括无线传输单元;其中,所述无线传输单元用于将信息采集单元采集到的像控点数据、POS数据、倾斜影像和激光扫描数据传输到模型构建内阶段;
(3)模型构建:包括数据处理单元和三维建模单元;所述三维建模单元根据配准后的数据,利用context Capture软件,全自动构建特高拱坝三维实景模型。
进一步的,所述数据准备中实现飞行控制单元的具体步骤如下:飞行控制单元用于根据制定的飞行计划控制无人机进行航摄。
进一步的,所述数据准备中实现信息采集单元的步骤如下:信息采集单元用于采集像控点数据、无人机航摄数据和地面拍摄数据;所述无人航摄数据为无人机倾斜摄影时的POS数据和倾斜影像;所述地面拍摄数据为地面三维激光扫描仪的激光扫描数据。
进一步的,所述数据准备中信息采集单元的具体步骤如下:在数据采集前,利用载波相位差分技术进行像控点布设,所述像控点需均匀布设在整个测区范围内,且离测区边缘有一定的距离,像控点平面位置和高程测量均采用RTK方法,两者同步进行;根据测区所在位置,制定无人机飞行计划,根据飞行计划设置航飞参数,所述飞行计划包括预设航迹路线和飞行方式。
进一步的,所述模型构建中的多视影像平差处理具体步骤如下:根据SIFT特征提取算法对影像进行特征提取,并且建立连接点和连接线、控制点坐标以及POS数据的多视影像自检校区域网平差的误差方程,通过联合平差计算,得到每张像片外方位元素即像片所在的位置和姿态数据以及所有加密点的物方坐标。
进一步的,所述模型构建中的多视影像密集匹配具体步骤如下:利用多视影像联合平差处理获取到的影像外方位元素和加密点的物方坐标,结合CMVS即Cluster Multi-view Stereo方法对影像采取聚簇分类,目的是减少数据量,聚簇以后再由PMVS即Patch-based Multi-view Stereo方法通过初始特征匹配、膨胀、过滤三个步骤对同一物体不同角度的多幅图像完成密集匹配,获取密集的三维点云。
进一步的,所述模型构建中基于特征的点云配准的步骤如下:在三维激光点云上提取一定数量的特征点坐标,与倾斜影像上对应的同名点相关联,通过绝对定向,获取在激光点云坐标系下的倾斜影像三维点云,然后建立两者点云之间的映射关系,从而实现点云之间的配准。
进一步的,所述模型构建中基于特征的点云配准的具体步骤如下:倾斜影像点云与地面激光点云数据集分别为P、Q,所在的坐标系统分别为o-xyz,O-XYZ,P
式中,μ为两点集坐标系的比例尺缩放系数,R表示旋转矩阵,R(α,β,γ)用如下表现形式:
进一步的,所述步骤(3)中模型构建中构建数据处理单元的具体步骤如下:数据处理单元用于将像控点数据、POS数据和倾斜影像进行多视影像平差处理和多视影像密集匹配,生成影像点云,并将激光扫描数据进行多站扫描和点云拼接,生成激光点云,然后利用基于特征的点云配准将影像点云和激光点云进行数据配准,为后续的三维建模奠定基础。
进一步的,所述步骤(3)中模型构建中构建三维建模单元的具体步骤如下:对配准后的数据进行空三加密,经过空三加密后获取了大量高密度的点云数据,对其进行切块分割,按照设置的优先等级对分割区块内的密集点云构建不规则三角网TIN,并全自动快速构建白体三维模型,再将白体模型进行纹理映射和模型精细化处理,最后生成特高拱坝面的三维可视化图像。
本发明利用无人机作为一个方便、高效和低成本的飞行平台,弥补了传统航测成本高、飞行窗口要求高、生产组织困难等诸多不足。无人机倾斜摄影测量技术具有灵活、经济且便于携带的特点,并且能从一个垂直和四个倾斜角度进行空间信息的采集,可以快速的获取地物的高分辨率纹理信息,有效的提高了获取地物纹理信息的效率。地面拍摄采用三维激光扫描技术,是一种高效率、高精度、非接触式的主动测量技术,可以在多种恶劣观测条件下进行外业扫描,大面积快速获取目标物体的表面三维坐标数据。最后利用ContextCapture软件,可以将倾斜摄影的测量数据及三维激光扫描的点云数据融合建模,从而最大限度地真实还原建筑的真实场景。
有益效果:本发明与现有技术相比具有以下优点:
(1)本发明通过远程控制无人机在复杂环境下进行信息采集和三维建模;
(2)本发明将无人机倾斜摄影技术和三维激光扫描仪技术相结合,实现优势互补,既突破了传统航空摄影技术只能从一个角度获取地面影像的局限性,又保证了倾斜摄影被遮挡区域点云的完整性,提高了模型的精细度;
(3)本发明可实时三维建模和建图,并且可进行后期处理。
附图说明
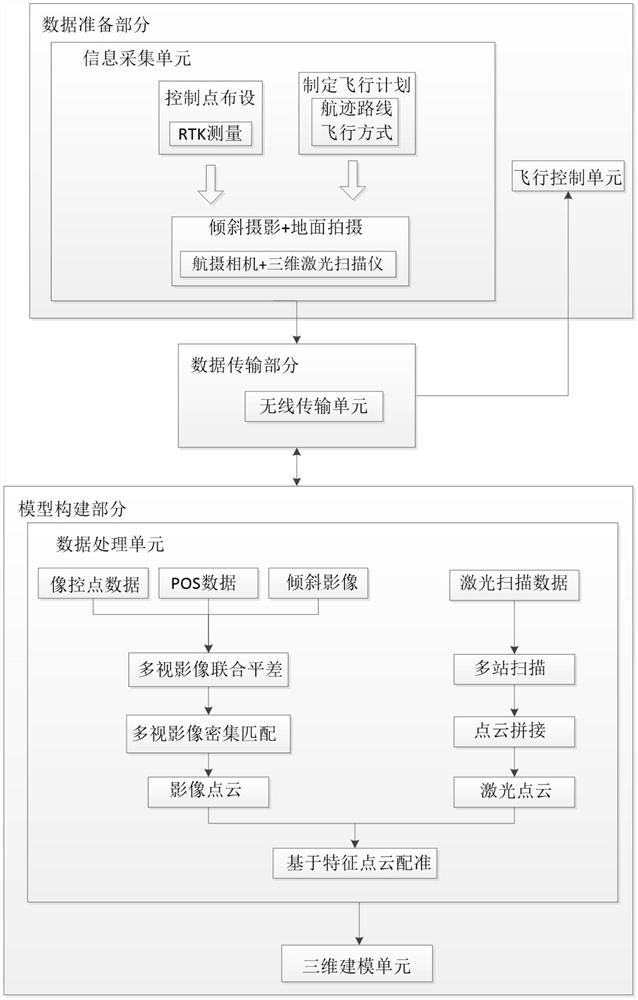
图1为本发明的流程图;
图2为具体实施例中SIFT(Scale-Invariant Feature Transform)方法流程图;
图3为具体实施例中CMVS(Cluster Multi-view Stereo)方法流程图;
图4为具体实施例中PMVS(Patch-based Multi-view Stereo)方法流程图;
图5为具体实施例中三维建模单元示意图。
具体实施方式
下面结合具体实施例,进一步阐明本发明,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落于本申请所附权利要求所限定的范围。
本发明实施例公开的特定工程地形下基于群体智能的特高拱坝坝面三维快速建模研究方法,包括数据准备、数据传输和模型构建三部分,如图1所示,数据准备部分包括信息采集单元和飞行控制单元,信息采集单元用于采集特高拱坝坝面相关数据,飞行控制单元用于控制无人机在特定区域飞行;数据传输部分包括无线传输单元,用于传输坝面数据和无人机飞行参数;模型构建部分包括数据处理单元和三维建模单元,数据处理单元用于处理采集到的坝面数据使其更好地让三维建模单元进行特高拱坝坝面快速建模。具体包含以下步骤:
步骤S1,数据准备;
S1-1,信息采集单元在数据采集前,利用载波相位差分技术进行像控点布设,像控点需均匀布设在整个特高拱坝测区范围内,且离测区边缘有一定的距离;
S1-2,像控点平面位置和高程测量均采用RTK方法,两者同步进行;
S1-3,根据测区所在位置,制定无人机飞行计划,飞行计划包括预设航迹路线和飞行方式;
S1-4,根据飞行计划设置航飞参数;
S1-5,飞行控制单元根据制定的飞行计划控制无人机进行航摄;
S1-6,信息采集单元采集像控点数据、无人机航摄数据和地面拍摄数据;无人航摄数据为无人机倾斜摄影时的POS数据和倾斜影像;地面拍摄数据为地面三维激光扫描仪的激光扫描数据;
步骤S2,数据传输;
S2-1,无线传输单元将信息采集单元采集到的像控点数据、POS数据、倾斜影像和激光扫描数据传输到模型构建部分。
步骤S3,模型构建;
S3-1,数据处理单元将无线传输单元传输过来的像控点数据、POS数据和倾斜影像进行多视影像平差处理,以消除坝面不同角度的影像数据之间的几何变形和遮挡问题;
S3-1-1,根据SIFT(Scale-Invariant Feature Transform)特征提取算法对图像进行特征提取,方法流程如图2所示,一个图像的尺度空间可以由尺度可变高斯函数G(x,y,σ)和输入图像I(x,y)卷积得到,通过相邻两个高斯尺度空间相减,得到高斯差分尺度空间DOG响应值图像G(x,y,σ),为:
I(x,y)=L(x,y,kσ)-L(x,y,σ)
式中:
极值点的检测和关键点的精确定位,在DOG尺度空间每个像素点分别与上下相邻尺度以及同尺度的26(同尺度相邻8个、上下相邻尺度9×2)个像素点比较,获得局部极值点,以拟和三维二次函数来精确确定关键点的位置和尺度,同时去除低对比度的关键点和不稳定的边缘响应点以增强匹配稳定性、提高抗噪声能力。
关键点的方向参数确定,利用关键点邻域像素的梯度及方向分布的特性,为每个关键点确定梯度模式和方向,计算公式为:
SIFT描述子生成和图像匹配,用128维SIFT特征向量来描述每一个特征点,当两幅图像的描述子生成后,用关键点特征向量的欧式距离进行判断完成两幅图像间的匹配。
S3-1-2,解算图像特征匹配获取的连接点和连接线,建立连接点、连接线、像控点数据和POS数据的多视影像自检校区域网平差的误差方程,将自检校参数、像控点坐标以及外方位元素视为带权观测值,平差的基本误差方程为:
式中,A
上式可简化为:V=AX-L,P
S3-1-3,通过对误差方程进行联合平差计算,得到每张图像外方位元素(即像片所在的位置和姿态数据)以及所有加密点的物方坐标;
S3-2,利用多视影像联合平差处理获取到的影像外方位元素和加密点的物方坐标进行多视影像密集匹配,生成影像点云;
S3-2-1,结合CMVS(Cluster Multi-view Stereo)方法对影像采取聚簇分类,方法流程如图3所示,SFM过滤后去除多余图像,重复增强图像大小约束和覆盖范围约束,直到满足图像大小约束,目的是减少数据量,删除坝面影像质量不好的数据,保证坝面影像质量,从而提高后续密集匹配效率;
S3-2-2,聚簇以后再由PMVS(Patch-based Multi-view Stereo)方法,流程如图4所示,通过初始特征匹配、膨胀、过滤三个步骤对坝面同一位置不同角度的多幅图像完成密集匹配,从而利用多视影像中的信息对坝面盲区地物特征进行补充;
S3-2-3,获取密集的三维点云;
S3-3,数据处理单元将激光扫描数据进行多站扫描和点云拼接,生成激光点云;
S3-3-1,在环绕坝面一周的不同位置设站,采用多测站多视角扫描方式,对坝面不同部位分别扫描,获取坝面各个部位的分块点云数据;
S3-3-2,采用改进的ICP算法对分块点云数据进行两两拼接,对待拼接点云集的每个点在参考点集中找一个与之距离最近的点,建立点对映射关系,然后以点对间距离平方和最小为条件,通过最小二乘迭代解算出一个最优坐标转换关系式,从而完成点云拼接,生成各站的激光点云;
S3-4,利用基于特征的点云配准将影像点云和激光点云进行数据配准,为后续的三维建模奠定基础;
S3-4-1,在三维激光点云上提取一定数量的特征点坐标,与倾斜影像上对应的同名点相关联,假设倾斜影像点云与地面激光点云数据集分别为P、Q,所在的坐标系统分别为o-xyz,O-XYZ,P
S3-4-2,通过绝对定向,获取在激光点云坐标系下的倾斜影像三维点云,这样就会建立两者点云之间的映射关系,从而实现点云之间的配准。两个点集中任意同名点之间都满足如下关系:
式中,μ为两点集坐标系的比例尺缩放系数,R表示旋转矩阵,R(α,β,γ)可用如下表现形式:
S3-5,三维建模单元根据配准后的数据,利用Context Capture软件,全自动构建特高拱坝三维实景模型,如图5所示;
S3-5-1,对配准后的数据进行空三加密;
S3-5-2,经过空三加密后获取了大量高密度的点云数据;
S3-5-3,对点云数据进行切块分割,按照设置的优先等级对分割区块内的密集点云构建不规则三角网TIN;
S3-5-4,全自动快速构建白体三维模型;
S3-5-5,将白体模型进行纹理映射;
S3-5-6,模型精细化处理;
S3-5-7,生成特高拱坝坝面的三维可视化图像。
- 一种基于群体智能的特高拱坝坝面三维快速建模方法
- 一种基于高精地图的三维交通场景快速建模方法