一种多瓶旋转采集识别方法及设备
文献发布时间:2023-06-19 11:49:09
技术领域
本发明涉及图像采集技术领域,尤其涉及一种多瓶旋转采集识别方法及设备。
背景技术
目前市面上对西林瓶身上的标签码,一般采用工业相机对视野范围内的瓶身标签进行拍照,获得瓶身标签图像,再对图像进行解析以获取当前瓶标签二维码数据;但是该过程中由于瓶子一直保持移动状态,且瓶身上标签码的朝向并非固定,导致瓶身标签采集成功率较低;且每次采集拍照时只能对一个瓶子进行拍照,即只能有一个瓶子进入相机视野范围内,导致瓶子的运输速度较慢,采集效率低,进而影响生产效率。
发明内容
为了克服现有技术的不足,本发明的目的之一在于提供一种多瓶旋转采集识别方法,可大幅度提升图片采集效率,提高采集识读率。
本发明的目的之二在于提供一种电子设备。
本发明的目的之一采用如下技术方案实现:
一种多瓶旋转采集识别方法,包括:
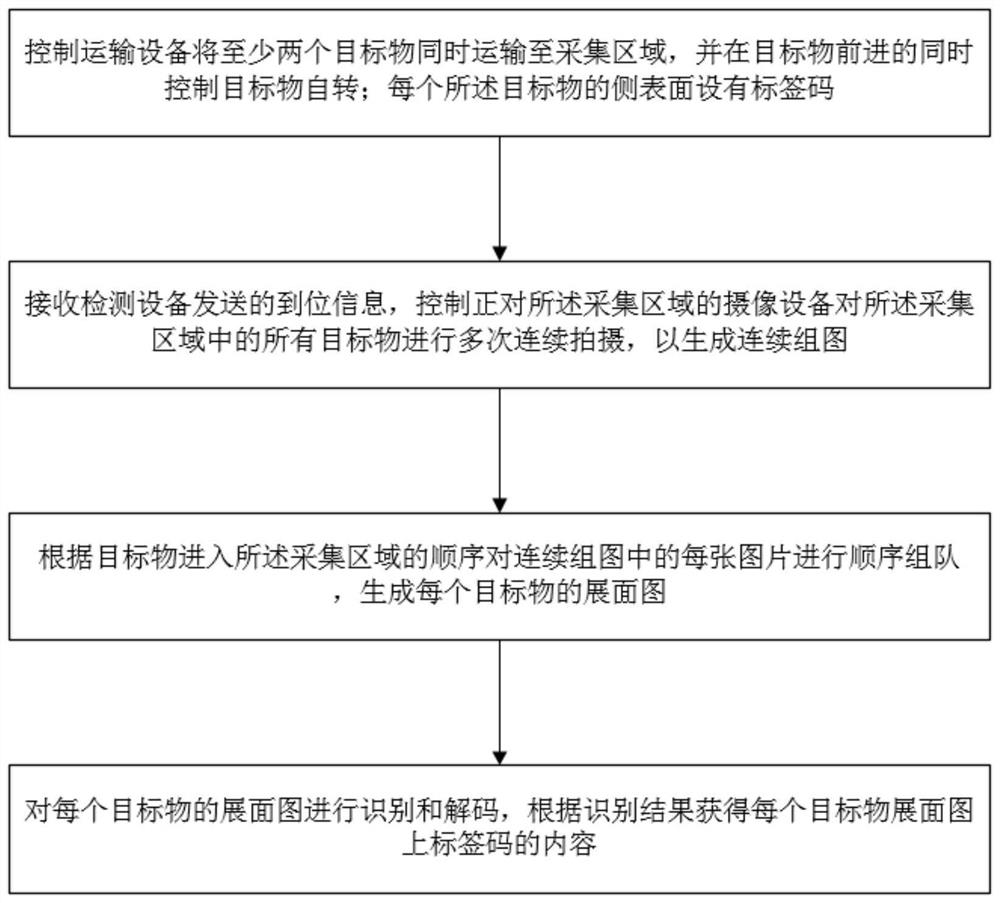
步骤S1:控制运输设备将至少两个目标物同时运输至采集区域,并在目标物前进的同时控制目标物自转;每个所述目标物的侧表面设有标签码;
步骤S2:接收检测设备发送的到位信息,控制正对所述采集区域的摄像设备对所述采集区域中的所有目标物进行多次连续拍摄,以生成连续组图;
步骤S3:根据目标物进入所述采集区域的顺序对连续组图中的每张图片进行顺序组队,生成每个目标物的展面图;
步骤S4:对每个目标物的展面图进行识别和解码,根据识别结果获得每个目标物展面图上标签码的内容。
进一步地,所述采集区域的工作区域长度为200~400mm,且所述采集区域中相邻目标物之间的间距维持在90~110mm之间。
进一步地,所述摄像设备连续拍摄次数等于同时进入采集区域中的目标物的数量*10。
进一步地,所述运输设备每分钟运输150~250个目标物经过所述采集区域。
进一步地,所述运输设备为单边夹持带输送机,通过单边夹持带输送机带动目标物前进的同时利用夹持带的摩擦力使目标物自转。
进一步地,所述步骤S3中生成每个目标物的展面图的方法为:
借由多个目标物进入采集区域后摄像设备对多个目标物连续拍摄,使得每张拍摄图片中均包含有每个目标物的局部图,按照目标物的进入所述采集区域的顺序提取每张拍摄图片中同一位置的局部图后对其进行拼接,以生成每个目标物的展面图。
进一步地,所述局部图进行拼接时,还包括:判断两张局部图之间是否有重叠区域,若有,则将两张局部图的重叠区域进行融合后再进行拼接。
进一步地,所述采集区域前方设有剔除装置,获得每个目标物的展面图后对展面图中的标签码进行识别,若识别不成功,则控制剔除装置将该目标物进行剔除。
本发明的目的之二采用如下技术方案实现:
一种电子设备,其包括处理器、存储器及存储于所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述的多瓶旋转采集识别方法。
相比现有技术,本发明的有益效果在于:
在采集区域内同时进入至少两个目标物,且通过对目标物多次连续拍摄以获得多张图片作为解码基础,对每张图片中每个目标物的图片进行解码即可获得每个目标物的展面图,可大幅度提高采集效率,同时还可提高解码的准确性。
附图说明
图1为本发明多瓶旋转采集识别方法的流程示意图;
图2为本发明目标物运输过程的整体流程示意图。
具体实施方式
下面,结合附图以及具体实施方式,对本发明做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
实施例一
本实施例提供一种多瓶旋转采集识别方法,应用在西林瓶分拣系统中,在本实施例中,将西林瓶作为目标物,每个目标物的瓶身上都设有标签码,该标签码可以是二维码或条形码,利用标签码记录目标物的各种信息,例如生产信息、用途信息、定位信息和质量信息等,通过识别该标签码来获取对应信息,从而做出对应决策。
如图1、图2所示,本实施例的方法具体包括如下步骤:
步骤S1:控制运输设备将至少两个目标物同时运输至采集区域,并在目标物前进的同时控制目标物自转。
在本实施例中,所述运输设备可以是单边夹持带输送机,单边夹持带输送机通过其单边夹持带运输目标物的同时,利用夹持带的摩擦力使得目标物在前进过程中自转,同时利用单边夹持带可避免夹持带遮挡目标物侧面上的标签码,确保摄像设备可清楚地拍摄到目标物的侧面。此外,所述运输设备也可以是输送带,在输送带上设有若干个由旋转机构带动的旋转工位,一个旋转工位对应一个目标物,在输送带前进过程中旋转机构启动带动目标物旋转。
将所述运输设备的部分区域划分为采集区域,每个目标物在所述运输设备中前进时都需经过采集区域;所述采集区域的工作区域长度为200~400mm,且所述采集区域中可同时进入至少两个目标物,而正对所述采集区域的位置设有摄像设备,摄像设备的拍摄范围可覆盖整个采集区域,使得摄像设备可对采集区域内的多个目标物的侧面位置进行同时拍摄。所述采集区域中相邻目标物之间的间距维持在90~110mm,避免采集区域中目标物过于拥挤,导致相邻目标物之间相互遮挡,影响采集准确率。
步骤S2:接收检测设备发送的到位信息,控制正对所述采集区域的摄像设备对所述采集区域中的所有目标物进行多次连续拍摄,以生成连续组图。
所述采集区域上设有检测设备,所述检测设备可检测是否有目标物进入采集区域;所述检测设备可以是激光传感器,当有目标物进入采集区域时,遮挡激光传感器发出的激光,激光传感器的接收端无法接收信号时,则认为目标物已经到位,此时发出到位信息。当接收到到位信息后,开始控制摄像设备对采集区域中的多个目标物进行连续拍摄。而所述摄像设备连续拍摄次数等于同时进入采集区域中的目标物的数量*10,举个例子,采集区域同时进入四个目标物,且目标物之间保持约100mm的稳定间距,当四个目标物到位后,控制摄像设备对四个目标物拍摄四十张图片,拍摄数量相对传统的拍摄数量增加,使得图片解码基数增加,可获得更优的解码效果,提高采集识读率。
步骤S3:根据目标物进入所述采集区域的顺序对连续组图中的每张图片进行顺序组队,生成每个目标物的展面图。
获得四十张连续组图时,连续组图中每张图片中都包含有四个目标物的局部侧面图,对图片进行顺序组队过程中,按照目标物的进入所述采集区域的顺序提取每张图片中同一位置的局部图后对其进行拼接,以生成每个目标物的展面图;举个例子:将每张图片中排列第一的局部图都提取出来后,将局部图拼接在一起即可获取排列第一位的目标物的侧面展开图。同理,将四十张图片都进行解码后即可获得四个目标物完整的展面图。
而在局部图拼接过程中,还需判断两张局部图之间是否有重叠区域,若有,则将两张局部图的重叠区域进行融合后再进行拼接,避免出现展面图中出现标签码重复的地方,可提高标签码的识别准确性。
步骤S4:对每个目标物的展面图进行识别和解码,根据识别结果获得每个目标物展面图上标签码的内容。
由于每个目标物的展面图中必定包含有目标物上的标签码,对每个目标物的展面图进行识别和解码后,可以获得标签码所记录的信息。在所述运输设备的所述采集区域前方设有剔除装置,图片识别和解码过程可在摄像设备采集目标物图片之后,到达剔除装置之前完成。若对展面图中的标签码识别不成功,则代表图片采集或解码过程失败,此时控制剔除装置将该目标物进行剔除;又或者标签码上记录有目标物的质量信息,当识别完毕后获得目标物的质量信息为不合格,此时也可控制剔除装置将该目标物进行剔除。
在本实施例中,采集区域的工作区域长度与摄像设备拍照图片的数量、摄像设备的拍摄质量、目标物的运输速度都有密切相关;一般情况下,摄像设备的像素高、视野范围大,工作区域长度就大,拍照所获得的图片就越多,但因图片像素高,数量多,将会降低解码的效率和成功率,故并非相机像素越高,工作区域越长或速度越快,识别成功率越高。本实施例经反复计算和测试,当前采取400mm工作区域长度和200万像素相机为最佳配置,并控制所述运输设备每分钟运输150~250个目标物经过所述采集区域,在该配置下,同时让四个目标物进入采集区域,摄像设备对采集区域连续拍摄四十张图片,即每个目标物都有四十张解码图片作为解码基础,可获得最优的解码效果,提高了采集识读率,同时目标物的运输效率也得到提高,可实现实际应用最高速度。同时,根据不同应用情况也可以采用不同配置长度和像素相机以实现相应目的。
实施例二
本实施例提供一种电子设备,其包括处理器、存储器及存储于所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现实施例一中的多瓶旋转采集识别方法。
本实施例中的设备与前述实施例中的方法是基于同一发明构思下的两个方面,在前面已经对方法实施过程作了详细的描述,所以本领域技术人员可根据前述描述清楚地了解本实施例中设备的结构及实施过程,为了说明书的简洁,在此就不再赘述。
上述实施方式仅为本发明的优选实施方式,不能以此来限定本发明保护的范围,本领域的技术人员在本发明的基础上所做的任何非实质性的变化及替换均属于本发明所要求保护的范围。
- 一种多瓶旋转采集识别方法及设备
- 一种摄像头的旋转识别方法及带旋转摄像头的电子设备