一种用于骨科四肢康复训练的两用型锻炼康复装置
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及康复设备技术领域,具体是涉及一种用于骨科四肢康复训练的两用型锻炼康复装置。
背景技术
随着时代和社会的变更,骨科伤病谱有了明显的变化,例如,骨关节结核、骨髓炎、小儿麻痹等疾病明显减少,交通事故引起的创伤明显增多,人口的老化,老年性骨质疏松引起的骨折、骨科学关节病增多,环境因素的影响,骨肿瘤、类风湿性关节炎相应增多等等。
而对于骨科患者的康复过程中功能锻炼十分重要,其主要是通过患者主动活动和被动活动维持肌肉、关节活动,防止肌肉萎缩、关节僵硬,促进血液循环,预防畸形,最大范围的恢复功能,最大程度的降低致残率。
然后现有技术中并未出现一种能够快速切换对手臂、腿部切换训练的训练装置,难以满足不同骨科患者训练部位的需求,因此,现需要一种新型骨科患者康复训练装置来解决上述这一技术问题,满足功能间的无缝切换,并降低占地面积,并相应的可以增设更多此类装置。
发明内容
为解决上述技术问题,本发明提供了一种用于骨科四肢康复训练的两用型锻炼康复装置。
本发明的技术方案是:一种用于骨科四肢康复训练的两用型锻炼康复装置,包括:
主体框架,其包括两组纵杆以及横向设置在两组纵杆之间的横杆,所述横杆两端与纵杆滑动连接,且各通过一个第一升降电机与纵杆底端连接;
两用切换训练架,所述两用切换训练架包括转动架,所述转动架与横杆通过转动总成连接,所述转动总成与横杆对接处设有第一转动电机,转动总成与转动架对接处设有第二转动电机,转动架下侧两端各设有一组用于训练腿部的腿部训练件,上侧两端各设有一组用于训练手臂的手臂训练件,所述腿部训练件、手臂训练件分别通过调节套与所述转动架连接,所述调节套通过连接板与转动总成的延伸板连接,转动架中部还设有用于驱动腿部训练件、手臂训练件的两用驱动杆;
所述两用驱动杆包括杆体,所述杆体的中心轴线处开设有槽孔,两用驱动杆与转动架转动连接,两用驱动杆分别通过腿部传动部分、手臂传动部分对应与腿部训练件、手臂训练件进行对接控制,
所述腿部传动部分包括套管传动杆、传动齿环及第一传动绳,所述套管传动杆套接在转动架上,并转动套接在转动套内与转动总成的延伸板通过连接板连接,所述传动齿环设置在杆体与套管传动杆对应侧壁上,套管传动杆一端与传动齿环对接处设有对接齿环,套管传动杆另一端设有卷绳轮,所述卷绳轮通过所述第一传动绳与腿部训练件连接传动;
所述手臂传动部分包括踏板及第二传动绳,所述踏板滑动设置在槽孔内,踏板底部与槽孔底部之间通过弹簧连接,踏板上部与所述第二传动绳连接,第二传动绳贯穿杆体并伸入转动架内,并从转动架与手臂训练件位置对应处设有的出孔伸出与手臂训练件连接传动。
本发明的两用型锻炼康复装置,通过框架结构的设计以及利用两用切换训练架的结构设置,可以通过两用驱动杆的不同使用方式,训练腿部时,可以用两个手臂拉动传动杆件对腿部进行辅助协助,训练手臂时,可以用两个腿部踩动传动杆件中部竖向设置的传动踏板,然后辅助协助手臂伸展运动,使训练装置能够转动切换康复训练手臂或腿的装置,从而满足不同骨科患者对训练部位的需求。
进一步地,所述横杆一侧还设有可调式座位,可调式座位主要包括椅座、第二升降电机、底座,所述第二升降电机设置在底座上,所述椅座与第二升降电机的输出端连接,所述底座与设置在主体框架对应一侧设置基板滑动连接,所述基板与两组纵杆底部固定连接。通过设置可调式座位,可以根据主体框架对两用切换训练架调节时,对椅座进行对应调节,并且可以通过可调式座位在基板进行滑动调节与主体框架之间的间距,从而优化骨科患者康复训练的使用体验。
进一步地,所述腿部训练件、手臂训练件分别通过滑块与调节套上对应设置的滑槽滑动连接,所述滑块设有用于锁紧在滑槽上移动的锁块。通过腿部训练件、手臂训练件在调节套滑动设置,可以对其进行腿部训练件的间距、手臂训练件的间距可进行调节,以满足不同使用患者的使用需求,以达到较优的训练效果。
进一步地,所述两用驱动杆与横杆对应一侧侧壁上设有红外发射器,横杆对应一侧侧壁与红外发射器位置对应处设有红外接收器,所述腿部传动组件、手臂传动组件上对应设有自锁组件,其用于通过红外接收器、红外发射器的配合并控制对应控制腿部自锁组件、手臂自锁组件的开合;
其中,所述腿部自锁组件包括第一电动插销,所述第一电动插销设置在杆体下端的底部,所述杆体、转动架与第一电动插销位置对应处设有与其配接的穿孔;
所述手臂自锁组件包括第二电动插销,所述第二电动插销设置在踏板底部,所述槽孔侧壁与第二电动插销位置对应处设有与其配接的孔块。
通过在模式切换中,开启对应训练件的自锁组件同时关闭相对训练件的自锁组件,通过上述的腿部自锁组件、手臂自锁组件并配合红外接收器、红外发射器可以有效实现此功能,从而避免误操作等情况。
进一步地,所述主体框架上还设有用于控制各电机的控制盒,所述控制盒内载控制器与所述第一升降电机、第二升降电机、转动总成的第一、第二转动电机、第一、第二电动插销通过继电器连接;其中,所述控制盒的作用包括:用于第一升降电机、第二升降电机的升降启动调节高度,用于转动总成的第一转动电机转动调节两用切换训练架的角度,用于转动总成的第二转动电机启停切换两用驱动杆的位置以切换模式,用于感应两用驱动杆位于上部或下部以开启对应训练件的自锁组件同时关闭相对训练件的自锁组件。通过设置上述的控制盒可以有效实现上述功能,使两用型锻炼康复装置操作使用更加简便,同时避免出现误操作等情况。
进一步地,所述腿部训练件、手臂训练件均包括两组可转动的上固定板、下固定板,所述上、下固定板均为可伸缩板结构,上、下固定板的非伸缩部通过伸缩杆与回复转轴连接,上、下固定板的非伸缩部上设有多组用于固定的魔术贴带,上固定板非伸缩部侧壁中部设有用于导向限位传动绳的管套,下固定板非伸缩部设有与传动绳连接的固定块,腿部训练件、手臂训练件的上固定板与调节套通过用于调节角度的转轴件固定连接。通过上述结构设置的腿部训练件、手臂训练件可以有效的配合两用驱动杆的腿部传动部分、手臂传动部分从而通过腿部训练件、手臂训练件对骨科患者进行康复训练辅助。
进一步地,所述两用驱动杆两侧壁上各设有一个用于把持的把手,所述把手上设有防滑纹。通过两组把手的设置可以提高两用驱动杆的操作使用,使其在驱动腿部传动部分使更易操作。
本发明的有益效果是:
(1)本发明两用型锻炼康复装置可以满足手臂、腿部康复训练功能间的无缝切换,并降低占地面积,从而可相应的增设更多此类装置。
(2)本发明两用型锻炼康复装置通过框架结构的设计以及利用两用切换训练架的结构设置,可以通过两用驱动杆的不同使用方式,操作简便,使用安全,操控难度低。
(3)本发明两用型锻炼康复装置能够自动转动切换康复训练手臂或腿的装置,并且使用安全,对于骨科患者操作不便的情况下,通过自动化切换优化了模式切换的难度,从而满足不同骨科患者对训练部位的需求以及自主操作性。
附图说明
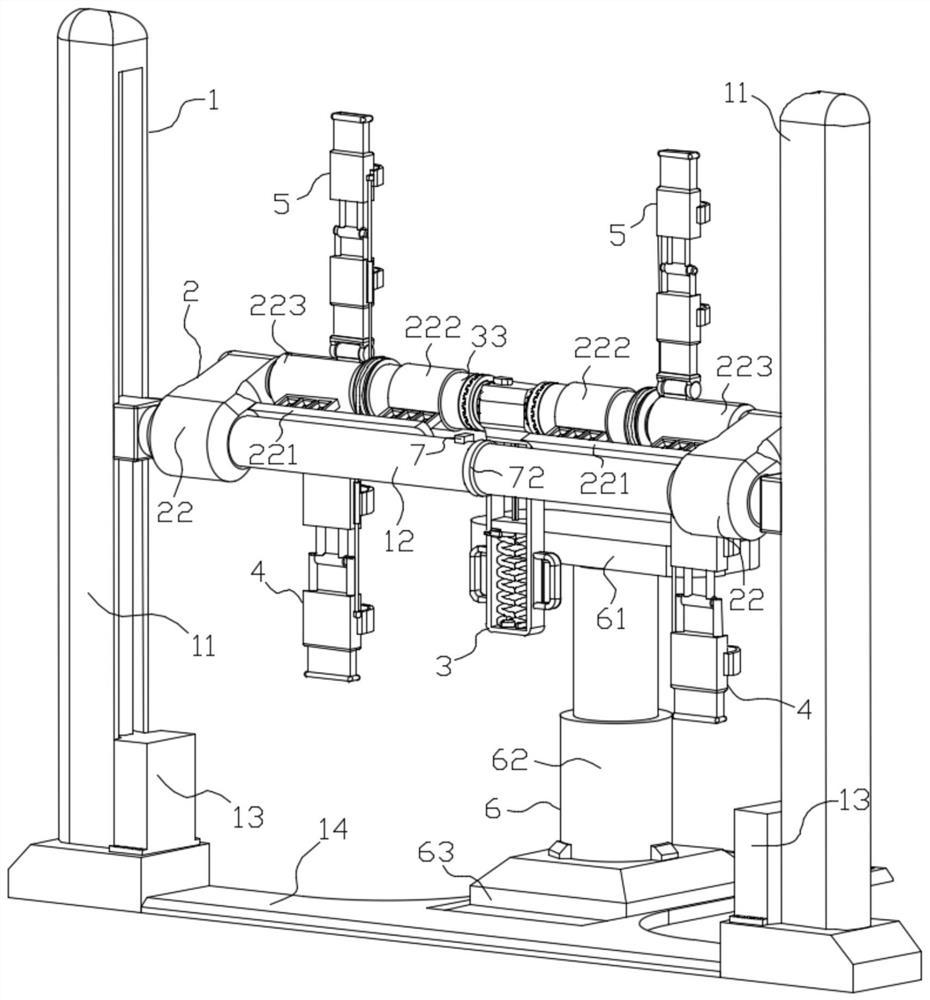
图1是本发明装置的整体结构示意图。
图2是本发明两用切换训练架的结构示意图一。
图3是本发明两用切换训练架的结构示意图二。
图4是本发明两用切换训练架的主视结构示意图。
图5是本发明两用切换训练架的主体侧视图。
图6是本发明图5的A-A处剖视图。
图7是本发明两用驱动杆的结构示意图。
图8是本发明套管传动杆的结构示意图。
图9是本发明腿部训练件的结构示意图。
图10是本发明手臂训练件的结构示意图。
图11是本发明具体实施例中腿部训练模式示意图。
图12是本发明具体实施例中手臂训练模式示意图。
其中,1-主体框架、11-纵杆、12-横杆、13-第一升降电机、14-基板、2-两用切换训练架、21-转动架、22-转动总成、221-延伸板、222-转动套、223-调节套、224-连接板、3-两用驱动杆、31-杆体、32-槽孔、33-套管传动杆、331-对接齿环、332-卷绳轮、34-传动齿环、35-第一传动绳、36-踏板、37-第二传动绳、38-弹簧、39-把手、4-腿部训练件、41-第一电动插销、42-上固定板、43-下固定板、44-伸缩杆、45-回复转轴、46-魔术贴带、47-套管、48-固定块、5-手臂训练件、51-第二电动插销、6-可调式座位、61-椅座、62-第二升降电机、63-底座、7-控制盒、71-红外发射器、72-红外接收器。
具体实施方式
如图1所示,一种用于骨科四肢康复训练的两用型锻炼康复装置,包括:主体框架1,其包括两组纵杆11以及横向设置在两组纵杆11之间的横杆12,横杆12两端与纵杆11滑动连接,且各通过一个第一升降电机13与纵杆11底端连接;横杆12一侧还设有可调式座位6,可调式座位6主要包括椅座61、第二升降电机62、底座63,第二升降电机62设置在底座63上,椅座61与第二升降电机62的输出端连接,底座63与设置在主体框架1对应一侧设置基板14滑动连接,基板14与两组纵杆11底部固定连接。通过设置可调式座位6,可以根据主体框架1对两用切换训练架2调节时,对椅座进行对应调节,并且可以通过可调式座位6在基板14进行滑动调节与主体框架1之间的间距,从而优化骨科患者康复训练的使用体验;
如图2-5所示,两用切换训练架2,两用切换训练架2包括转动架21,转动架21与横杆12通过转动总成22连接,转动总成22与横杆12对接处设有第一转动电机,转动总成22与转动架21对接处设有第二转动电机,转动架21下侧两端各设有一组用于训练腿部的腿部训练件4,上侧两端各设有一组用于训练手臂的手臂训练件5,腿部训练件4、手臂训练件5分别通过调节套223与转动架21连接,调节套223通过连接板224与转动总成22的延伸板221连接,转动架21中部还设有用于驱动腿部训练件4、手臂训练件5的两用驱动杆3;
如图9、10所示,腿部训练件4、手臂训练件5均包括两组可转动的上固定板42、下固定板43,上、下固定板42,43均为可伸缩板结构,上固定板42、下固定板43的非伸缩部通过伸缩杆44与回复转轴45连接,回复转轴45具体为市售设有扭力弹簧的转轴,上固定板42、下固定板43的非伸缩部上设有一组用于固定的魔术贴带46,上固定板42非伸缩部侧壁中部设有用于导向限位传动绳的管套47,下固定板43非伸缩部设有与传动绳连接的固定块48,腿部训练件4、手臂训练件5的上固定板42与调节套223通过用于调节角度的转轴件固定连接,转轴件具体为市售阻尼转轴。腿部训练件4、手臂训练件5分别通过滑块与调节套223上对应设置的滑槽滑动连接,滑块设有用于锁紧在滑槽上移动的橡胶块,其与滑块可拆卸卡接。通过上述结构设置的腿部训练件4、手臂训练件5可以有效的配合两用驱动杆3的腿部传动部分、手臂传动部分从而通过腿部训练件4、手臂训练件5对骨科患者进行康复训练辅助;通过腿部训练件4、手臂训练件5在调节套223滑动设置,可以对其进行腿部训练件4的间距、手臂训练件5的间距可进行调节,以满足不同使用患者的使用需求,以达到较优的训练效果。
如图7所示,两用驱动杆3包括杆体31,杆体31的中心轴线处开设有槽孔32,两用驱动杆3与转动架21转动连接,两用驱动杆3分别通过腿部传动部分、手臂传动部分对应与腿部训练件4、手臂训练件5进行对接控制,两用驱动杆3两侧壁上各设有一个用于把持的把手39,把手39上设有防滑纹。通过两组把手39的设置可以提高两用驱动杆3的操作使用,使其在驱动腿部传动部分使更易操作。
如图4、8所示,腿部传动部分包括套管传动杆33、传动齿环34及第一传动绳35,套管传动杆33套接在转动架上,并转动套接在转动套222内与转动总成22的延伸板221通过连接板224连接,传动齿环34设置在杆体31与套管传动杆33对应侧壁上,套管传动杆33一端与传动齿环34对接处设有对接齿环331,套管传动杆33另一端设有卷绳轮332,卷绳轮332通过第一传动绳35与腿部训练件4连接传动;
如图6、7、10所示,手臂传动部分包括踏板36及第二传动绳37,踏板36滑动设置在槽孔32内,踏板36底部与槽孔32底部之间通过两组弹簧38连接,踏板36上部与第二传动绳37连接,第二传动绳37贯穿杆体31并伸入转动架21内,并从转动架21与手臂训练件5位置对应处设有的出孔伸出与手臂训练件5连接传动。
如图3、7所示,两用驱动杆3与横杆12对应一侧侧壁上设有红外发射器71,横杆12对应一侧侧壁与红外发射器71位置对应处周向设有环形布置的红外接收器72,腿部传动组件、手臂传动组件上对应设有自锁组件,其用于通过红外接收器72、红外发射器71的配合并控制对应控制腿部自锁组件、手臂自锁组件的开合;其中,腿部自锁组件包括第一电动插销41,第一电动插销41设置在杆体31下端的底部,杆体31、转动架21与第一电动插销41位置对应处设有与其配接的穿孔;手臂自锁组件包括第二电动插销51,第二电动插销51设置在踏板36底部,槽孔32侧壁与第二电动插销51位置对应处设有与其配接的孔块。通过在模式切换中,开启对应训练件的自锁组件同时关闭相对训练件的自锁组件,通过上述的腿部自锁组件、手臂自锁组件并配合红外接收器72、红外发射器71可以有效实现此功能,从而避免误操作等情况;如图1所示,主体框架1上还设有用于控制各电机的控制盒7,控制盒7内载控制器与第一升降电机13、第二升降电机62、转动总成的第一、第二转动电机、第一电动插销41、第二电动插销51通过继电器连接;
其中,控制盒7的作用包括:用于第一升降电机13、第二升降电机62的升降启动调节高度,用于转动总成22的第一转动电机转动调节两用切换训练架2的角度,用于转动总成22的第二转动电机启停切换两用驱动杆3的位置以切换模式,用于感应两用驱动杆3位于上部或下部以开启对应训练件的自锁组件同时关闭相对训练件的自锁组件。通过设置上述的控制盒7可以有效实现上述功能,使两用型锻炼康复装置操作使用更加简便,同时避免出现误操作等情况。
上述两用型锻炼康复装置,通过框架结构的设计以及利用两用切换训练架2的结构设置,可以通过两用驱动杆的不同使用方式,训练腿部时,可以用两个手臂拉动传动杆件对腿部进行辅助协助,训练手臂时,可以用两个腿部踩动传动杆件中部竖向设置的传动踏板,然后辅助协助手臂伸展运动,使训练装置能够转动切换康复训练手臂或腿的装置,从而满足不同骨科患者对训练部位的需求。
采用上述装置进行骨科患者的康复训练,工作原理具体如下:
通过外接遥控器指令控制盒7内的控制器,通过指令、继电器对第一升降电机13、第二升降电机13、转动总成22的第一转动电机进行控制,调节主体框架1的横杆12高度,调节可调式座位6的高度,调节两用切换训练架2的角度;
腿部训练模式(如图11所示,两用驱动杆3位于转动架21上方):
当转动总成22的第二转动电机驱动转动架21进行转动使两用驱动杆3位于转动架21上方,期间两用驱动杆3上的红外发射器71与设置在横杆12上的红外接收器72脱离对接,从而通过控制盒7作用关闭手臂自锁组件,同时打开腿部自锁组件,
患者坐在可调式座位6上并将大腿部分通过魔术贴带46固定在上固定板42上,并将小腿部分通过魔术贴带46固定在下固定板43上,期间,通过拉伸上固定板42、下固定板43的伸缩部来根据患者腿长进行调节,通过伸缩杆44调节上固定板42、下固定板43之间转动间距,
随后拿捏两用驱动杆3上的把手39使两用驱动杆3围绕转动架21进行摆动,通过腿部传动部分的传动作用使腿部训练件4进行辅助运动;
其中,腿部传动部分与腿部训练件4的作用原理为:当两用驱动杆3转动带动传动齿环34转动,从而通过传动齿环34与对接齿环331的啮合传动使套管传动杆33转动从而拉放卷绳轮332上的第一传动绳35,通过第一传动绳35拉放辅助带动下固定板43克服回复转轴45的回复力进行转动,从而对小腿与大腿处关节进行康复训练;
手臂训练模式(如图12所示,两用驱动杆3位于转动架21下方):
当转动总成22的第二转动电机驱动转动架21进行转动使两用驱动杆3位于转动架21下方,期间两用驱动杆3上的红外发射器71与设置在横杆12上的红外接收器72再次对接,从而通过控制盒7作用关闭腿部自锁组件,同时打开手臂自锁组件,
患者坐在可调式座位6上并将上臂部分通过魔术贴带46固定在上固定板42上,并将下臂部分通过魔术贴带46固定在下固定板43上,期间,通过拉伸上固定板42、下固定板43的伸缩部来根据患者腿长进行调节,通过伸缩杆44调节上固定板42、下固定板43之间转动间距,
随后用脚踩踏板36使其拉动第二传动绳37,通过腿部传动部分的传动作用使腿部训练件4进行辅助运动;
其中,手臂传动部分与手臂训练件4的作用原理为:当两用驱动杆3的踏板36踩动使其下压弹簧38并拉动第二传动绳37,当放松踩踏踏板36其受到弹簧38的回复弹力沿着槽孔32上移,从而通过第二传动绳37拉放辅助带动下固定板43克服回复转轴45的回复力进行转动,从而对下臂与上臂处关节进行康复训练;
上述控制盒7中控制器为市售小型PLC控制器,外接遥控器具体为红外遥控PLC控制器的遥控板,红外发射器71、红外接收器72为市售红外传感器,上述第一升降电机13、第二升降电机62选用市售升降电机对其进行外形调整以适配本装置设置需求,上述第一电动插销、第二电动插销选用市售电动插销对其进行外形调整以适配本装置设置需求,上述第一转动电机、第二转动电机选用市售转动电机对其进行外形调整以适配本装置设置需求。