高速轨道交通同步直线电机牵引系统完整建模分析方法
文献发布时间:2023-06-19 18:34:06
技术领域
本发明属于计算机辅助设计技术领域,具体涉及一种高速轨道交通同步直线电机牵引系统完整建模分析方法。
背景技术
在以磁浮列车牵引系统为代表的大功率大推力直线电磁推进领域,直线电机具有高速度和直接驱动的优势。鉴于长定子短动子同步直线电机效率高于直线感应电机,在轨道交通以高效率得到了应用。目前业界开展了多种类型、结构的直线电机研究,对电机的参数与电机磁场、推力等产生的影响进行分析和优化。
但从牵引传动系统的角度来看,直线电机仅仅只是直线牵引系统中的一个核心部分,仅关注电机本体的电磁性能显然还不足够,而是需要对直线牵引相关的变流器、车体、电网、控制进行全系统研究。现有技术在电机建模时对众多参数进行了归纳整理,近年来现有技术还将电机与控制相结合进行了建模分析,如将直线电机有限元模型与Matlab电机变流控制算法进行联合仿真。但对系统某些指标进行优化还需要更加完善的系统级解决方案。
发明内容
本发明的目的在于:
为解决现有技术中的高速轨道交通线性同步系统尚有优化不足的问题,提供一种高速轨道交通同步直线电机牵引系统完整建模分析方法。
本发明采用的技术方案如下:
高速轨道交通同步直线电机牵引系统完整建模分析方法,包括如下步骤:
A、储能系统建模:采用脉冲同步发电机大惯性飞轮储能方式,建立储能系统,用于模拟弹射瞬间直流母线电压跌落的情况;认为脉冲发电机在转速n
U
B、模型车体与动子运动学建模:模型车体系统包括直线电机和直线电机动子,运动载荷质量包括直线电机动子总质量200kg、模型车质量220kg,及摩擦系数,运动过程中根据牛顿运动定律,阻力包括动子滑块与支撑加之间的摩擦力、动子励磁供电导轨与电刷之间的摩擦力;
C、力学建模:摩擦力与直线电机法向力F
F
其中:
F
μ
μ
F
m
m
a为加速度;
D、同步直线电动机有限元建模仿真:直线电机类型为双边型12相电励磁同步直线电机,电机动子采用电励磁方式,由充电后的超级电容放电,由两根铜导轨经电刷组,为8个空心线圈励磁,建立双边直线电机三维有限元模型,按照12相电流间隔15°相位,通入幅值1000A的方波电流,可以得到电磁推力值,最大值为70kN,通过有限元仿真得出相电感值为0.8mH;
E、同步直线电机简化模型:简化电机建模主要的目标根据基本的电机参数,包括结构尺寸、电磁参数、部分有限元计算参数,且忽略边端效应,忽略法向力影响,得到简化的电磁推力表达式,如下:
其中B
式中动子励磁磁动势F
随着动子磁极运行,对应不同齿槽中所对应的各相绕组所在位置其动子励磁磁动势F
E
F、变流器建模方案:变流器包括主电路、位置检测及变流控制,主电路拓扑配合12相定子绕组,主电路采用两电平12相H桥方式,东西两套电机分别由一套变流器给双边12相电机供电,变流器总功率达30MW,IGBT的耐压值3300V,电流能力1200A及以上;将12个H桥看作相互独立的功率单元,设计1相功率单元的控制框图;
G、光电式动子位置检测:针对变流控制需求,设计光电式动子位置检测环节;在动子上贴黑白相间的感光带,由于每极每相槽数为1,因此沿轨道方向每隔一个槽即铺设一个反射式光电传感器,并对应每相的N或S极,当动子白色感光带经过某传感器时,会产生高电平,并传递至脉冲分配板;动子位置检测输出信号通过设置偏移距离d
H、变流控制建模:设计给定相电流与实际相电流之间滞环比较器和相电流变化率;
对应各相H桥,给定相电流I
相电流变化率会影响电枢电流能否跟随给定相电流的变化,如下式所示,影响dI
I、仿真试验:典型工况仿真参数为:
储能及电源子系统n
模型车及机械装置m
直线电机相数n
变流器及其控制Δi=80A;d
仿真条件:给定相电流I
J、试验平台及高速实验:设置低气压管道多功能高速列车模型直线驱动系统,包括管道及管道外的储能系统和操作台,管道内设有直线电机及支撑架、模型车;进行弹射试验,在东线动子推动列车模型在40.32m牵引段加速,轨道最高试验速度达到116m/s,动子进入涡流制动段直至停止,而模型车则依靠惯性高速进入会车试验段;
K、结果分析:由步骤K的实验得到相邻两相电流波形,速度48m/s时,两相电流峰峰值均为±750A,且电流波形与典型工况下的仿真结果相似;在92m/s高速情况下,实验中的母线电压有所降落且高速时的反电势大,导致电流波形发生畸变,与电压跌落情况下的仿真结果相似;低速高速情况下的实验结果与仿真结果相似,验证了全系统模型的可行性和正确性。
进一步地,步骤F中变流器控制方案的软件上,变流器控制器以高性能单片机作为控制核心,通过检测动子位置和运行工况综合判断,给各功率单元发出给定相电流I
进一步地,步骤G中检测方法具体为:设当动子位于a位置时,放置于对应S
综上所述,由于采用了上述技术方案,本发明的有益效果是:
本发明通过建立全系统建模仿真试验,有效地指导了系统试验的开展,全系统建模的仿真与试验结果,验证了模型的有效性和正确性,能够直观地反映整个弹射过程中主要参数的变化情况,使该系统得到了显著优化。
附图说明
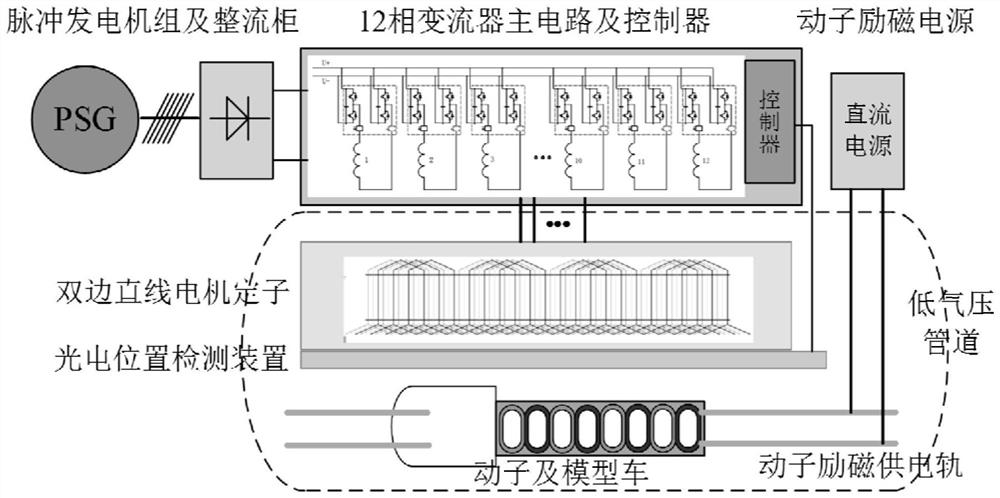
图1为本发明系统整体结构图;
图2为本发明能源与电力子系统的结构图;
图3为本发明双边型十二相永磁直线电机物理模型;
图4为本发明的双边直线电机三维有限元模型图;
图5为本发明的电机原理图;
图6为本发明的双边直线电机磁场分布图;
图7为本发明的双边直线电机磁密分布图;
图8为本发明的变流器分布图;
图9为本发明的同步电机变流器软件与硬件控制原理图;
图10为本发明对射式光电传感器、光栅位置检测装置检测图;
图11为本发明典型工况下电磁推力和速度参数图;
图12为本发明典型工况下相电压和电流波形图;
图13为本发明典型工况下相邻两相电流波形图;
图14为本发明典型工况下相磁动势与反电势参数图;
图15为本发明系统中直流母线电压跌落的影响下电磁推力受影响的参数变化图;
图16为本发明系统中直流母线电压跌落的影响下相邻两相电流变化图;
图17为本发明中动子位置检测输出信号偏移影响下电磁推力受影响的参数变化图;
图18为本发明中动子位置检测输出信号偏移影响下相磁动势与反电势的变化图;
图19为本发明实验中中低速时电流波形图;
图20为本发明实验中中高速时电流波形图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
本发明为一种高速轨道交通同步直线电机牵引系统完整建模分析方法,包括如下步骤:
A、储能系统建模:如图2,采用脉冲同步发电机大惯性飞轮储能方式,建立储能系统,用于模拟弹射瞬间直流母线电压跌落的情况;认为脉冲发电机在转速n
U
B、模型车体与动子运动学建模:模型车体系统包括直线电机和直线电机动子,运动载荷质量包括直线电机动子总质量200kg、模型车质量220kg,及摩擦系数,运动过程中根据牛顿运动定律,阻力包括动子滑块与支撑加之间的摩擦力、动子励磁供电导轨与电刷之间的摩擦力;
C、力学建模:摩擦力与直线电机法向力F
F
其中:
F
μ
μ
F
m
m
a为加速度;
D、同步直线电动机有限元建模仿真:如图4,直线电机类型为双边型12相电励磁同步直线电机,电机动子采用电励磁方式,由充电后的超级电容放电,由两根铜导轨经电刷组,为8个空心线圈励磁,建立双边直线电机三维有限元模型,按照12相电流间隔15°相位,通入幅值1000A的方波电流,可以得到电磁推力值,最大值为70kN,通过有限元仿真得出相电感值为0.8mH;
表1同步直线电机电磁仿真参数
E、同步直线电机简化模型:如图5,简化电机建模主要的目标根据基本的电机参数,包括结构尺寸、电磁参数、部分有限元计算参数,且忽略边端效应,忽略法向力影响,得到简化的电磁推力表达式,如下:
其中B
式中动子励磁磁动势F
随着动子磁极运行,对应不同齿槽中所对应的各相绕组所在位置其动子励磁磁动势F
E
F、变流器建模方案:如图6,变流器包括主电路、位置检测及变流控制,主电路拓扑配合12相定子绕组,主电路采用两电平12相H桥方式,东西两套电机分别由一套变流器给双边12相电机供电,变流器总功率达30MW,IGBT的耐压值3300V,电流能力1200A及以上;将12个H桥看作相互独立的功率单元,设计1相功率单元的控制框图;
G、光电式动子位置检测:针对变流控制需求,设计光电式动子位置检测环节;在动子上贴黑白相间的感光带,由于每极每相槽数为1,因此沿轨道方向每隔一个槽即铺设一个反射式光电传感器,并对应每相的N或S极,当动子白色感光带经过某传感器时,会产生高电平,并传递至脉冲分配板;动子位置检测输出信号可以通过设置偏移距离d
H、变流控制建模:设计给定相电流与实际相电流之间滞环比较器和相电流变化率;
对应各相H桥,给定相电流I
相电流变化率会影响电枢电流能否跟随给定相电流的变化,如下式所示,影响dI
I、仿真试验:典型工况仿真参数为:
储能及电源子系统n
模型车及机械装置m
直线电机相数n
变流器及其控制Δi=80A;d
仿真条件:给定相电流I
J、试验平台及高速实验:设置低气压管道多功能高速列车模型直线驱动系统,包括管道及管道外的储能系统和操作台,管道内设有直线电机及支撑架、模型车;进行弹射试验,在东线动子推动列车模型在40.32m牵引段加速,轨道最高试验速度达到116m/s,动子进入涡流制动段直至停止,而模型车则依靠惯性高速进入会车试验段;
K、结果分析:
由仿真实验得到结果如下:
(1)典型工况下如图11,在匀加速仿真条件下,电磁推力平均值约72kN,速度在0.675s达到120m/s;如图12,整个加速过程中,某一相(总共12相)绕组电压和电流的波形,频率逐渐升高;如图13,相邻2相电流波形,此时的速度大约110m/s;如图14,某相绕组励磁磁动势F
从以上结果可以看出,建模方法能够很好地模拟出电机运行的整个过程,并且能够得到电磁推力、电压、电流等参数。
(2)该模型可以反应参数对系统的影响,包括直流母线电压的下降、位置检测的输出移位:
如图15的电磁推力图与图16的相邻两相电流图,直流母线电压跌落的影响:当kg=0.8,也就是直流母线电压为典型工况的80%时,会发现在电机运行的后段,也就是电机高速阶段,电磁推力会下降,原因在于电机绕组里的电流在母线电压低且反电势高的情况下,电流上升较慢,导致有效作用时间短,反映到电磁推力下降。
如图17与图18,动子位置检测输出信号偏移距离d
(3)实验波形
如图19与图20,图19为速度48m/s时的波形图,图20为速度92m/s时的波形图,由步骤K的实验得到相邻两相电流波形,图19为速度48m/s时,两相电流峰峰值均为±750A,且电流波形与典型工况下的仿真结果相似,只是由于实际的硬件控制效果不是很理想,滞环宽度较大;图20则反映出,在92m/s高速情况下,实验中的母线电压有所降落且高速时的反电势较大,导致电流波形发生畸变,其情形与图5、图6相似。
从实验结果可以看出,电流波形与数值与仿真结果相似,即实现全系统模型的可行性和正确性。
进一步地,步骤F中变流器控制方案的软件上,变流器控制器以高性能单片机作为控制核心,通过检测动子位置和运行工况综合判断,给各功率单元发出给定相电流I
进一步地,步骤G中检测方法具体为:设当动子位于a位置时,放置于对应S
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种多相直线同步电机的高速磁浮列车牵引系统
- 一种长定子永磁同步直线电机牵引的高速铁路系统