山地轨道交通列车控制系统
文献发布时间:2024-01-17 01:26:37
技术领域
本申请涉及轨道交通技术领域,尤其涉及一种轨道交通列车控制系统。
背景技术
山地轨道交通是指位于山地环境,主要服务于旅游景区内部、景区之间以及沿线主要城镇客流,可满足大坡度的低运量轨道交通系统。
传统的城市轮轨轨道交通普遍应用成熟的基于通信的列车自动控制(Communication Based Train Control,CBCT)系统,但是CBCT系统无法完全匹配山地轨道交通列车控制需求,尤其是齿轨路段坡度较大,设备安装维护难度大,亟需响应山地轨道交通建设,提出一种协调适用的山地轨道交通列车控制系统。
发明内容
针对相关技术存在的上述问题,本申请实施例提供一种山地轨道交通列车控制系统。
本申请实施例提供一种山地轨道交通列车控制系统,包括:
控制中心,车载设备,轨旁设备,非设备集中站和设备集中站;
其中,所述控制中心包括信号设备室和中央控制室,所述信号设备室内设有列车控制系统LCS设备、列车自动监控ATS设备和无线核心网设备;
所述车载设备包括车载列车自动防护ATP设备、车载列车自动运行ATO设备和自主感知设备,所述自主感知设备用于判断轮齿切换时机,以实现轮齿自动切换;
所述非设备集中站包括第一车站控制室和第一室外设备;
所述设备集中站包括电源室、第二车站控制室、设备室和第二室外设备,所述设备室设有全电子联锁模块柜、计轴主机柜和集中监测柜;
所述非设备集中站受控于所述设备集中站。
在一些实施例中,所述车载设备还包括应答器天线和应答器传输模块BTM,所述轨旁设备包括应答器,所述应答器天线安装于车身一侧,所述应答器设于与所述应答器天线对应的线路一侧。
在一些实施例中,所述BTM用于列车的定位校准,通过存储在所述车载ATP设备中的电子地图将列车所在的区段属性标记为轮轨黏着区段、齿轨区段或切换区段。
在一些实施例中,所述轨旁设备还包括轮齿切换信号机,所述轮齿切换信号机设于轮轨黏着区段和齿轨区段的切换处;
所述LCS设备用于输出所述轮齿切换信号机的驱动命令,并对所述轮齿切换信号机的点灯状态进行回采,所述驱动命令经全电子联锁模柜中的全电子联锁模块发送至所述轮齿切换信号机。
在一些实施例中,所述ATP设备用于向所述LCS设备发送列车的定位信息并接收所述LCS设备发送的移动授权信息,以实现列车防护;所述ATO设备与所述ATP设备交互以实现列车运行。
在一些实施例中,所述LCS设备用于获取所述列车的定位信息,在所述列车到达所述切换区段时向所述列车发送轮齿切换命令,并将限速信息写入所述移动授权信息。
在一些实施例中,在无线通信中断的情况下,所述ATP设备还用于将所述列车降级至第一限制人工驾驶RM模式,防护所述列车在第一固定限速下运行。
在一些实施例中,在具有快速升级需求的长大区间,所述列车被手动设定为第二RM模式,防护所述列车在第二固定限速下运行,所述第二固定限速大于所述第一固定限速。
在一些实施例中,所述ATP设备还用于结合所述轨旁设备的报文信息和存储的电子地图信息,控制列车进行轮齿自动切换。
在一些实施例中,所述自主感知设备用于在所述列车未建立定位或所述ATP设备故障的情况下,基于对列车驶入路段的障碍物和/或轮齿切换信号的检测,判断所述轮齿切换时机。
本申请实施例提供的山地轨道交通列车控制系统,精简化轨旁设备,集中化室内设备,利用全电子联锁模块柜、LCS一体化设备精简系统架构,降低山地线路建设和维护的难度以及成本。
附图说明
为了更清楚地说明本申请或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本申请实施例提供的山地轨道交通列车控制系统的架构示意图;
图2是本申请实施例提供的轨旁应答器和车载天线布置的示意图;
图3是本申请实施例提供的轮齿切换信号机布置的示意图;
图4是本申请实施例提供的控制中心的架构示意图;
图5是本申请实施例提供的车载设备的架构示意图;
图6是本申请实施例提供的非设备集中站和设备集中站的架构示意图。
具体实施方式
为使本申请的目的、技术方案和优点更加清楚,下面将结合本申请中的附图,对本申请中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
山地(齿轨)轨道交通列车是一种采用轮轨黏着和齿轨啮合驱动前行的轨道交通工具,其中,黏着路段为仅通过钢轮与钢轨之间的黏合力实现车辆有效牵引驱动的路段,齿轨路段为车辆的钢轮处于惰行状态并通过齿轮-齿轨啮合驱动的路段,列车根据需要切换驱动方式。山地轨道交通列车的最高运行速度不超过120km/h,可在短距离内客服较大的地势高差,大幅度缩短线路长度。
在山地环境中,山地轨道交通相较于传统公路交通、传统城市轮轨轨道交通,具有爬坡能力强、占地面积小、运输能力强等优势;以及,线路建设可灵活适应地势起伏,减少隧道开挖,有益于山地生态环境的保护等。
山地轨道交通系统以其独特的优势成为山区建设铁路以及旅游轨道交通的极佳选择。但是,目前城市轮轨轨道交通普遍成熟应用的CBCT系统无法完全匹配山地轨道交通列车控制需求,具体分析如下:
①相较于城市轨道交通,山地轨道交通处于山地环境,尤其是齿轨路段坡度较大,设备安装维护难度大,因此需要精简CBTC列车控制系统设备构成,降低维护成本。
②齿轨路段线路中心铺设齿条,齿轨列车车架中心安装齿轨驱动装置,而CBCT列车控制系统在线路中心安装地面信标、列车车架中心安装信标读取装置,不适用于齿轨线路。
③齿轨列车采用轮轨黏着与齿轨混合牵引方式,列车控制系统需要控制列车自动切换牵引方式,实现黏着路段与齿轨路段的不停车通行,CBCT列车控制系统不支持该功能;相关技术中在轮齿转换出布设轨旁信标、标志牌,列车通过读取信标自动完成轮齿模式切换,或者,驾驶员通过瞭望标志牌手动完成轮齿模式切换,该方案轨旁设置两套设备,且轨旁标志牌瞭望距离有限,受天气等因素影响较大。
④为发挥齿轨线路的爬坡优势以及观光效益,齿轨线路多处于山地露天环境中,相较于城市轨道交通封闭的隧道、高架等,山地齿轨线路面临山地落石侵限的风险,CBCT系统无法防护此风险。
⑤山地轨道交通线路站间距离大,列车在区间降级后重新升级速度较慢,CBCT系统通过增设区间信标、信号机等方式实现长、大区间的快速升级,但不符合山地路线精简室外设备的需求。
针对相关技术存在的上述问题,本申请实施例提供一种山地轨道交通列车控制系统,在CBCT系统的基础上进行架构、功能的修改,以匹配山地轨道交通列车控制需求。
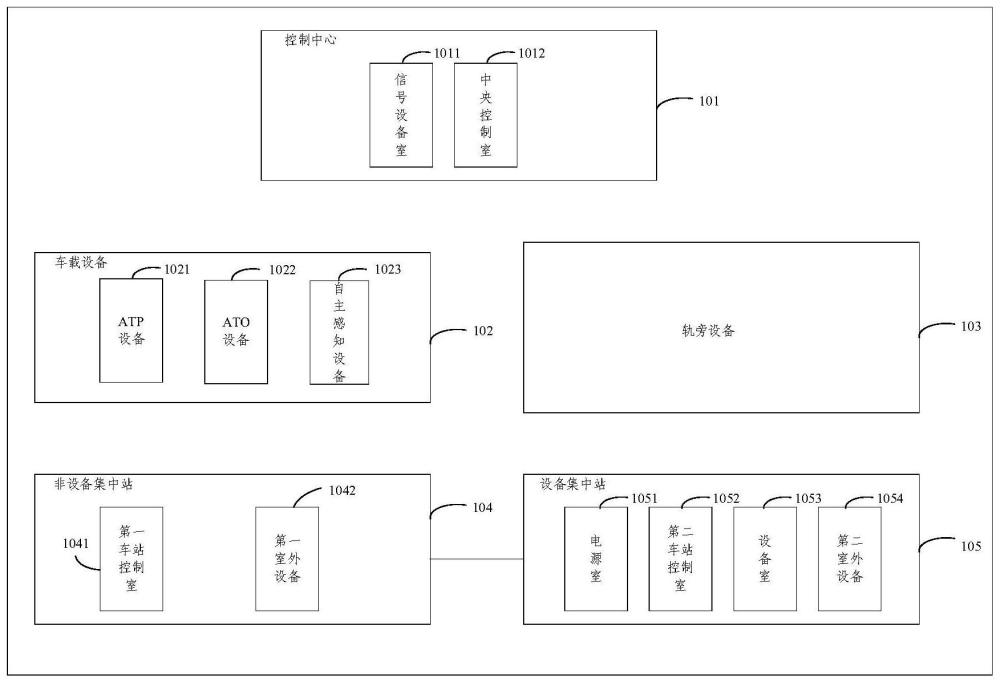
图1是本申请实施例提供的山地轨道交通列车控制系统的架构示意图,如图1所示,该系统至少包括:
控制中心101,车载设备102,轨旁设备103,非设备集中站104和设备集中站105。
其中,控制中心101包括信号设备室1011和中央控制室1012。可选地,信号设备室1011内设有列车控制系统(Line Control System,LCS)设备、列车自动监控系统(Automatic Train Supervision,ATS)设备和无线核心网设备等。可选地,中央控制室1012设有调度工作站、控制中心大屏幕等。LCS设备可以对山地轨道交通列车进行整体的控制。可选地,控制中心101还包括维修中心。
其中,车载设备102包括列车自动防护(Automatic Train Protection,ATP)设备1021、列车自动运行(Automatic Train Operation,ATO)1022设备和自主感知设备1023,在既有的CBCT系统的基础上增加自主感知设备1023。可选地,自主感知设备1023包括自主感知平台、传感器模组等。自主感知设备1023用于判断轮齿切换时机,以实现轮齿自动切换。可选地,自主感知设备用于在无法获取列车定位信息的情况下,辅助判断轮齿切换时机,以实现轮齿自动切换。
可选地,轨旁设备103包括应答器、信号机、道岔、计轴、无线设备、紧急按钮等。
其中,非设备集中站104包括第一车站控制室1041和第一室外设备1042。
其中,设备集中站105包括电源室1051、第二车站控制室1052、设备室1053和第二室外设备1054。可选地,设备室1053设有全电子联锁模块柜、计轴主机柜和集中监测柜等。设备集中站105虽然包含有第二室外设备1054,但其主要用于在于集中室内设备,以贴合山地轨道交通的建设和维护特点。全电子联锁模块柜主要由全电子联锁模块构成,具有设备紧凑、体积小、能耗低、施工简便、监测功能完备、故障指示到位、故障模块可带电插拔、现场维护少等优点。
可选地,非设备集中站104不设置室内信号设备,室内信号设备集中设置在设备集中站105,非设备集中站104受控于设备集中站105。
本申请实施例提供的山地轨道交通列车控制系统,精简化轨旁设备,集中化室内设备,利用全电子联锁模块柜、LCS一体化设备精简系统架构,降低山地线路建设和维护的难度以及成本。
在一些实施例中,车载设备102还包括应答器天线和应答器传输模块(BaliseTransmission Module,BTM),应答器天线安装于车身一侧,轨旁设备103包括应答器,应答器设于与应答器天线对应的线路一侧。
具体地,应答器天线即BTM天线。图2是本申请实施例提供的轨旁应答器和车载天线布置的示意图,如图2所示,选用小型化、轻量化的轨旁应答器,偏置于线路一侧,相应地将车载应答器天线安装于车身一侧,合理规划轨旁信标、车载天线安装位置,贴合山地轨道特点,避开齿条、齿轮位置,以满足齿轨路段轨旁信标以及车载应答器天线安装要求。
本申请实施例提供的山地轨道交通列车控制系统,优化轨旁信标、车载天线的选型和安装位置,贴合山地齿轨线路和列车特点。
在一些实施例中,BTM用于列车的定位校准,通过存储在所述车载ATP设备中的电子地图将列车所在的区段属性标记为轮轨黏着区段、齿轨区段或切换区段。
具体的,列车可以通过BTM天线读取轨旁无源信标中存储的信息,对比电子地图信息后建立自身定位,并在运行过程中根据速度传感器、雷达测速进行连续定位,根据读取到的无源信标进行定位校准。ATP设备中存储有电子地图,电子地图中可以将线路属性标记为轮轨黏着区段、齿轨区段和切换区段,一并标记的还可以有各个区段的坡度信息、限速信息等。
在一些实施例中,轨旁设备103还包括轮齿切换信号机,轮齿切换信号机设于轮轨黏着区段和齿轨区段的切换处;
LCS设备用于输出轮齿切换信号机的驱动命令,并对轮齿切换信号机的点灯状态进行回采,驱动命令经全电子联锁模块柜中的全电子联锁模块发送至轮齿切换信号机。
具体地,图3是本申请实施例提供的轮齿切换信号机布置的示意图,如图3所示,轨旁设备103还可以包括轮齿切换信号机,设置在轮轨黏着区段和齿轮区段的切换处,或者说,图示的切换区段的边界处,包括入齿位置和出齿位置。
由LCS设备输出驱动命令,驱动命令经设备集中站105设置的全电子联锁模块输出至轮齿切换信号机,并对轮齿切换信号机的实际点灯状态进行回采,由LCS设备实时监督点灯状态。
可选地,轮齿切换信号机的点灯状态需要与防护列车进路的信号机点灯状态区分,防护列车进路的信号机点灯状态为红灯(禁止信号)、红黄灯(引导信号)、黄灯(允许信号,经道岔侧向)、绿灯(允许信号),轮齿切换信号机的点灯状态可设为双黄灯,以指示前方进入轮齿切换路段,点灯状态也可根据工程需要进行调整。
本申请实施例提供的山地轨道交通列车控制系统,在轮轨黏着区段和齿轨区段的切换处安装轮齿切换信号机,并通过LCS设备驱动轮齿切换信号机和回采轮齿切换信号机的点灯状态,能够试试监控轮齿切换需求。
在一些实施例中,ATP设备用于向LCS设备发送列车的定位信息并接收LCS设备发送的移动授权信息,以实现列车防护;ATO设备与ATP设备交互以实现列车运行。
具体地,车载设备102包括车载ATP设备和车载ATO设备。ATP设备监督列车在安全速度下运行,确保列车一旦超过规定速度,立即施行制动。ATO设备是控制列车自动运行的设备,在ATP系统的保护下,根据相关指令实现列车运行的自动驾驶、速度的自动调整、列车车门控制。
车载ATP设备与LCS设备进行交互以实现列车防护,具体可以为:车载ATP设备通过无线传输向地面LCS设备发送自身定位信息,LCS区域控制器单元根据轨旁设备联锁信息、各个列车在线位置信息、线路电子地图信息等,为车载ATP设备对应的列车计算移动授权,并通过无线传输实时发送给车载ATP设备。由车载ATP设备根据自身存储的线路电子地图信息、LCS设备区域控制器移动授权信息、列车参数信息等实时生成列车速度曲线,防护列车运行。
车载ATO设备与车载ATP设备交互以实现列车运行,具体可以为:车载ATO设备根据车载ATP设备生产的列车速度曲线等信息实现列车自动巡航、牵引、制动、站台精确停车等。
本申请实施例提供的山地轨道交通列车控制系统,配置列车自主感知设备:车载ATP设备和车载ATO设备,防护山地齿轨路段面临的山体落石侵限风险,控制列车自动运行。
在一些实施例中,LCS设备用于获取列车的定位信息,在列车到达切换区段时向列车发送轮齿切换命令,并将限速信息写入移动授权信息。
具体地,无线通信正常时,列车实时向LCS区域控制器单元发送定位信息,LCS区域控制器单元在列车到达轮齿切换区段时,向列车发送轮齿切换命令,并将限速信息(第一固定限速与第二固定限速的最严格取值)写入移动授权信息下发至列车,由车载ATP向列车控制和管理系统(Train Control and Management System,TCMS)转发轮齿切换命令,并按限速信息防护列车运行。
可选地,限速信息包括第一固定限速和第二固定限速,可以为第一固定限速和第二固定限速的最严格取值。第一固定限速为一般的限速,第二固定限速是指在特定路段,根据路段的运行需求设置的不同于第一固定限速的限速。
本申请实施例提供的山地轨道交通列车控制系统,利用LCS设备,在通信正常的情况下,为列车下发移动授权信息,并在列车到达轮齿切换区段时控制轮齿切换。
本申请实施例提供的山地轨道交通列车控制系统,为列车配置BTM设备,实现列车的定位校准和线路属性标记。
在一些实施例中,在无线通信中断的情况下,ATP设备还用于将列车降级至第一限制人工驾驶(Restricted Mode,RM)模式,防护列车在第一固定限速下运行。
在一些实施例中,在具有快速升级需求的长大区间,所述列车被手动设定为第二RM模式,防护列车在第二固定限速下运行,第二固定限速大于第一固定限速。
具体地,无线通信中断后,列车无法接收LCS区域控制器单元的移动授权信息,ATP设备将列车自动降级至第一RM模式,第一RM模式指一般的限制人工驾驶模式,车载ATP仅防护列车在第一固定限速下运行。
考虑到车辆段内道岔限速,RM模式第一固定限速一般设置为25km/h,但列车在长大区间内降级后有快速升级需求,因此本申请实施例中设置第二RM模式,或者“高速RM”模式,提高降级列车的第一固定限速,例如提高至45km/h(可配置),称之为“第二固定限速”,司机可通过控制台按钮由RM模式切换至“高速RM”模式,人工驾驶列车在“高速RM”的第二固定限速下运行,使列车尽快建立定位、完成升级。
高速RM模式,可以提高降级列车在正线区间的顶棚限速,使列车尽快建立定位,降低故障影响。
本申请实施例提供的山地轨道交通列车控制系统,在无线通信中断的情况下,将列车降级至第一RM模式,控制列车在第一固定限速下运行,并在长大区间支持手动切换至第二RM模式,控制列车在高于第一固定限速的第二固定限速下运行,以满足列车在长大区间的快速升级需求。
在一些实施例中,ATP设备还用于结合轨旁设备的报文信息和存储的电子地图信息,控制列车进行齿轮自动切换。
具体地,参照图3,RM模式/高速RM模式的列车建立自身定位后,ATP设备可结合轨旁设备(具体为轨旁信标)的报文信息、ATP存储的电子地图信息、测速测距信息判断进入轮齿切换区段的时机,向车辆TCMS发送轮齿切换命令,并按电子地图齿轨区段、轮轨(黏着)区段、切换区段第一固定限速防护列车运行。
本申请实施例提供的山地轨道交通列车控制系统,车地无线通信中断,但列车具备定位时,车载ATP可识别轨旁信标斌读取电子地图信息,控制列车实现轮齿自动切换,防护列车运行限速。
在一些实施例中,自主感知设备1023用于在列车未建立定位或ATP设备故障的情况下,基于对列车驶入路段的障碍物和/或轮齿切换信号的检测,判断轮齿切换时机。
具体地,若列车的定位信息无法获取,例如未建立定位或者ATP设备故障,轮齿切换时机由自主感知设备1023进行判断。可选地,自主感知设备1023包括自主感知平台、传感器模组等。自主感知设备1023可以基于对列车驶入路段的障碍物和/或轮齿切换信号的检测,来判断轮齿切换时机。
车载配置自主感知设备1023,例如,车头前方安装摄像头、雷达传感器模组,实时探测列车运行前方轨道线、障碍物、信号机灯位,由自主感知平台综合处理传感器信息,判断列车运行前方限界内是否存在障碍物(人、车、落石、车挡等),并根据图像信息检测前方是否存在轮齿切换信号(双黄灯,可配置)。
自主感知设备1023与车辆控制系统TCMS、车载ATP设备同时接口,若监测到限界内障碍物,自主感知设备向TCMS、ATP同时发送紧急制动请求和报警信息;若检测到轮齿切换信号(双黄灯,可配置),自主感知设备向TCMS、ATP择机发送轮齿切换请求。对于自主感知设备发送的紧急制动请求、轮齿切换请求,车辆TCMS可直接响应执行紧急制动、轮齿切换,也可通过蜂鸣器、人机显示屏等声光设备提示司机确认是否执行,待司机按压确认按钮后再响应相关命令。若车载ATP设备运行良好但未建立定位,车载ATP收到轮齿切换请求(或待司机确认)后,按最低固定限速防护列车运行。
可选地,通过司机瞭望+列车自主感知轮齿切换信号机的显示状态,二者结合控制列车实现轮齿自动切换。
本申请实施例提供的山地轨道交通列车控制系统,在列车未建立定位或者ATP设备故障的情况下,利用自主感知设备来判断轮齿切换时机,实现列车轮齿自动切换。
图4是本申请实施例提供的控制中心的架构示意图,图5是本申请实施例提供的车载设备的架构示意图,图6是本申请实施例提供的非设备集中站和设备集中站的架构示意图,如图4、图5和图6所示,本申请实施例提供的山地轨道交通列车控制系统,基于传统城市轮轨轨道交通CBTC列车控制系统,提出匹配山地(齿轨)轨道交通列车控制需求的控制系统解决方案,系统功能贴合山地齿轨线路的特点,提升山地(齿轨)轨道交通列车控制系统的可用性、安全性、可维护性,降低线路建设、运营维护的难度和成本。图5中TAU表示车载接入单元(Train Access Unit),TRU表示信号收发单元(Transceiver Unit),AOM表示辅助驾驶设备(Assistant Operation Module),HMI表示人机接口(Human Machine Interface)。
以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性的劳动的情况下,即可以理解并实施。
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到各实施方式可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件。基于这样的理解,上述技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如ROM/RAM、磁碟、光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行各个实施例或者实施例的某些部分所述的方法。
最后应说明的是:以上实施例仅用以说明本申请的技术方案,而非对其限制;尽管参照前述实施例对本申请进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本申请各实施例技术方案的精神和范围。