一种免棱镜全站仪的泄洪水面线动态观测方法
文献发布时间:2023-06-19 11:08:20
技术领域
本发明涉及一种免棱镜全站仪的泄洪水面线动态观测方法,属于水利工程测量领域。
背景技术
大坝泄洪时,由于下泄水流流量大、流速高,会对下游消力池产生巨大的冲刷、气蚀、振动作用,给消力池的安全带来严重考验。因此,工程上迫切需要对泄洪时大坝下游的水面线快速、准确的测量,以满足消力池水力特性和稳定安全分析,确定合理的泄洪方案,以减小下泄水流对消力池安全的影响。
在目前的水面线测量方法中,传统的水位尺测量需要人工将测量尺架设在水中,在水流流量较大、流速较高的泄洪消力池测量中根本无法使用;而传统的免棱镜全站仪测量水面线方法,当混凝土面被水湿润后,对激光信号存在较大吸收,反射回光信号严重减弱,导致全站仪很难捕捉到有效的激光回光信号,进而无法完成数据的测量。针对传统测量方法的不足,广大学者提出了一些新的测量方法。李翊等提出了通过图像识别技术检测水面线的技术,但此方法同样需要在待测点架设标尺;另外,若标尺在测量过程中出现污点,则对测量结果有较大的影响;鲍江等通过采集视频图像,再通过Haar特征检测出水位线,但此方法在采集视频图像时,要求待测水面保持稳定,而在消力池泄洪时,水流比较湍急,水面起伏较大,水面很难保持平静,同时该方法在阳光比较强烈的情况下,很容易出现误检的情况,而消力池两岸的混凝土对阳光的反射都比较强烈,因此该方法很难对消力池泄洪时的水面线进行有效观测;李东峰等通过潮位仪与GPS技术来测量水面线高程,但要求潮位仪稳定不动,同时要求GPS流动站安装在测量船上,而消力池泄洪时,水流湍急,波浪翻滚剧烈,无论是潮位仪还是GPS测量船,都很难在泄洪时保持稳定,因而不能用于消力池水面的动态测量;钟强等提出了利用高速摄像机视频和三维地形的测量方法,对动态水面进行三维重构,但此方法不能直接实时测得水面线的高程。尽管这些方法有所改进,但仍不能满足泄洪水面线快速、高效的观测要求。
发明内容
本发明提供了一种免棱镜全站仪的泄洪水面线动态观测方法,满足快速、高效地对泄洪水面线动态观测要求。
本发明的技术方案是:一种免棱镜全站仪的泄洪水面线动态观测方法,首先在待观测的水面线上方附近找一容易观测点作为工作基点,利用全站仪测得工作基点的高程以及工作基点与测站间的距离;然后将望远镜瞄准待测的动态水面线的待测点,并及时测得待测点与工作基点间的水平角和竖直角;再利用待测点与工作基点的三角关系,推算出全站仪与待测点之间的高差,得出待测点的高程。
具体地,首先测量全站仪与待测点之间的高差,所述方法如下:
(1)工作基点视线水平且与对岸垂直
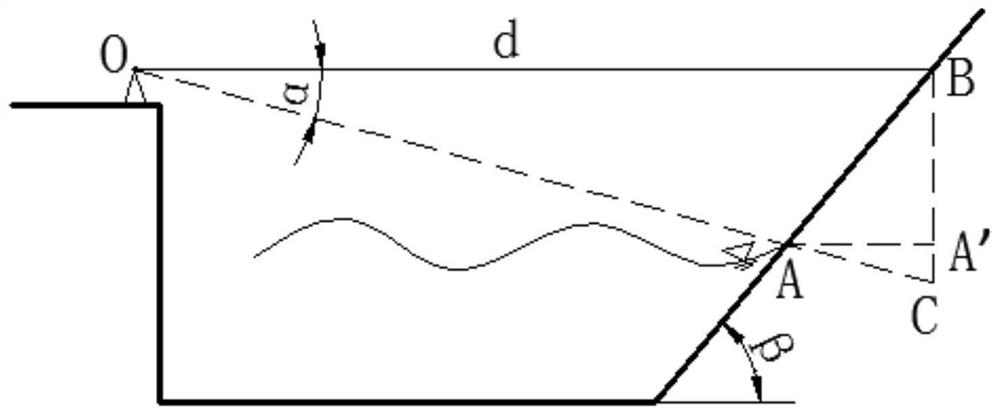
待测点A位于测站O的前方的正下方,选择水平视线与对岸垂直的交点B为工作基点,A'为A点水平方向上在竖直面上的投影点,首先测得O、B两点间的水平距离d,再将全站仪望远镜的十字丝对准水面与混凝土的交界面待测点A,测得OB和OA之间的俯角α,则可通过OBA之间的三角关系求出B点与A点之间的高差BA’,即全站仪与待测点之间的高差;
若待测对岸仅为一斜坡,坡角为β,无马道,则A、B点之间的高差BA’为:
若待测对岸为一斜坡,坡角为β,且存在一马道,宽度为b,则此时全站仪与水面之间的高差BA’为:
(2)工作基点视线仰视且与对岸垂直
若测站O点正前方无法设置工作基点,可选择其正前方的上方的D点作为工作基点,首先测得O、D之间的斜距d以及OD与水平视线OB之间仰角γ;然后再将全站仪望远镜的十字丝对准待测点A点,测得OA和OB之间的俯角α,则可通过OBA之间的三角关系求出全站仪与待测点之间的高差BA’;
若待测对岸仅为一斜坡,坡角为β,无马道,则此时全站仪与待测点之间的高差BA’为:
若待测对岸为一斜坡,坡角为β,且存在一马道,宽度为b,则此时全站仪与水面之间的高差BA’为:
(3)工作基点视线水平且与对岸斜交
若待测点A不在测站O的正前方,位于正前方视线两侧,则需在正前方的两侧方位设置工作基点B,当全站仪的视线存在水平偏转时,观测视线立面与待测点对岸不垂直,视线立面与岸坡的交线的倾角并非岸坡的倾角,而是一视倾角θ,视倾角θ、岸坡坡角β以及视线水平方向偏转角δ三者之间的关系则为:
tanθ=tanβcosδ (5)
首先测得水平视线与OA之间的俯角α以及视线OA的水平偏转角δ;然后调整全站仪的视线OB水平,测得O、B之间的距离d;则可通过OBA之间的三角关系求出全站仪与待测点之间的高差BA’;
若待测对岸仅为一斜坡,坡角为β,无马道,则此时全站仪与待测点之间的高差BA’为:
若待测对岸为一斜坡,坡角为β,且存在一马道,宽度为b,则此时全站仪与待测点A之间的高差BA’为:
(4)工作基点视线仰视且与对岸斜交
若待测点A不在测站O的正前方,位于正前方视线两侧,工作基点D设置在侧方且位于水平视线的上方,首先测得水平视线与OA之间的俯角α以及视线OA的水平偏转角δ;然后调整全站仪的视线至D点,测得O、D之间的距离d和OD与水平视线OB之间的仰角γ;则可通过OBA之间的三角关系求出全站仪与待测点之间的高差BA’;
若待测对岸仅为一斜坡,坡角为β,无马道,则此时全站仪与待测点A之间的高差BA’为:
若待测对岸为一斜坡,坡角为β,且存在一马道,宽度为b,则此时全站仪与待测点A之间的高差BA’为:
具体地,求得全站仪与待测点A之间的高差BA’之后,再结合测站点地面的高程▽
▽
本发明的有益效果是:不需要利用激光对待测点实时测量,只需利用十字丝对待测点进行实时跟踪即可,通过全站仪的角度测量传感器实时测量出竖直角和水平角,因此,可实现对待测点的快速测量,大幅提高测量的速度,实现对波浪影响区域内待测点的实时、快速测量,满足快速、高效地对泄洪水面线进行动态观测的要求。
附图说明
图1为本发明工作基点视线水平且与对岸垂直,对岸无马道。
图2为本发明工作基点视线水平且与对岸垂直,对岸有马道。
图3为本发明工作基点视线仰视且与对岸垂直,对岸无马道。
图4为本发明工作基点视线仰视且与对岸垂直,对岸有马道。
图5为本发明工作基点视线水平且与对岸斜交,对岸无马道。
图6为本发明工作基点视线水平且与对岸斜交,对岸有马道。
图7为本发明工作基点视线仰视且与对岸斜交,对岸无马道。
图8为本发明工作基点视线仰视且与对岸斜交,对岸有马道。
具体实施方式
实施例1:如图1~8所示,一种免棱镜全站仪的泄洪水面线动态观测方法,首先在待观测的水面线上方附近找一容易观测点作为工作基点,利用全站仪测得工作基点的高程以及工作基点与测站间的距离;然后将望远镜瞄准待测的动态水面线的待测点,并及时测得待测点与工作基点间的水平角和竖直角;再利用待测点与工作基点的三角关系,推算出全站仪与待测点之间的高差,得出待测点的高程。
进一步地,首先测量全站仪与待测点之间的高差,所述方法如下:
(1)工作基点视线水平且与对岸垂直
待测点A位于测站O(即全站仪的位置)的前方的正下方,选择水平视线与对岸垂直的交点B为工作基点,A'为A点水平方向上在竖直面上的投影点,首先测得O、B两点间的水平距离d,再将全站仪望远镜的十字丝对准水面与混凝土的交界面待测点A,测得OB和OA之间的俯角α,则可通过OBA之间的三角关系求出B点与A点之间的高差BA’,即全站仪与待测点之间的高差;
若待测对岸仅为一斜坡,坡角为β,无马道,则A、B点之间的高差BA’为:
若待测对岸为一斜坡,坡角为β,且存在一马道,宽度为b,则此时全站仪与水面之间的高差BA’为:
(2)工作基点视线仰视且与对岸垂直
若测站O点正前方无法设置工作基点,可选择其正前方的上方的D点作为工作基点,首先测得O、D之间的斜距d以及OD与水平视线OB之间仰角γ;然后再将全站仪望远镜的十字丝对准待测点A点,测得OA和OB之间的俯角α,则可通过OBA之间的三角关系求出全站仪与待测点之间的高差BA’;
若待测对岸仅为一斜坡,坡角为β,无马道,则此时全站仪与待测点之间的高差BA’为:
若待测对岸为一斜坡,坡角为β,且存在一马道,宽度为b,则此时全站仪与水面之间的高差BA’为:
(3)工作基点视线水平且与对岸斜交
若待测点A不在测站O的正前方,位于正前方视线两侧,则需在正前方的两侧方位设置工作基点B,当全站仪的视线存在水平偏转时,观测视线立面与待测点对岸不垂直,视线立面与岸坡的交线的倾角并非岸坡的倾角,而是一视倾角θ,视倾角θ、岸坡坡角β以及视线水平方向偏转角δ三者之间的关系则为:
tanθ=tanβcosδ (5)
首先测得水平视线与OA之间的俯角α以及视线OA的水平偏转角δ;然后调整全站仪的视线OB水平,测得O、B之间的距离d;则可通过OBA之间的三角关系求出全站仪与待测点之间的高差BA’;
若待测对岸仅为一斜坡,坡角为β,无马道,则此时全站仪与待测点之间的高差BA’为:
若待测对岸为一斜坡,坡角为β,且存在一马道,宽度为b,则此时全站仪与待测点A之间的高差BA’为:
(4)工作基点视线仰视且与对岸斜交
若待测点A不在测站O的正前方,位于正前方视线两侧,工作基点D设置在侧方且位于水平视线的上方,首先测得水平视线与OA之间的俯角α以及视线OA的水平偏转角δ;然后调整全站仪的视线至D点,测得O、D之间的距离d和OD与水平视线OB之间的仰角γ;则可通过OBA之间的三角关系求出全站仪与待测点之间的高差BA’;
若待测对岸仅为一斜坡,坡角为β,无马道,则此时全站仪与待测点A之间的高差BA’为:
若待测对岸为一斜坡,坡角为β,且存在一马道,宽度为b,则此时全站仪与待测点A之间的高差BA’为:
进一步地,计算待测点A的高程▽A
求得全站仪与待测点A之间的高差BA’之后,再结合测站点地面的高程▽
▽
3实例分析
3.1公式验证
为了验证公式的正确性,选择校园某一水池水位进行观测,通过观测计算值和实测值进行对比分析,验证公式的正确性。水池岸边为混凝土衬砌,斜坡坡角为62°59′40″,全站仪型号为中海达ZPS-121R。测量的相对误差为误差的绝对值与距离d之间的比值。观测结果如表1所示。由表1可以看出本方法的测量结果误差很小,精度很高。
表1校园某一水池水位观测结果
3.2明渠泄洪水面线观测
泄洪水面线观测,选择某水电站明渠泄洪时进行实际观测。全站仪还是选择中海达ZPS-121R,测站设在明渠的左导墙之上,以观测不同工况情况下明渠右岸的水面线变化情况。为方便观测,测站具体位置设置在左导0+239.341m,明渠边0.77m处,全站仪仪器高为1.46m。明渠左导墙顶高程为1004m,明渠右岸在高程1002.5m处设置一条马道,其宽度为2m,岸坡坡角为53°7′48″。泄洪水面线观测结果如表2所示。由表2可以看出本方法的测量结果误差很小,精度很高。
表2某水电站明渠泄洪水面线观测结果
通过实例分析表明,本方法的测量结果误差很小,可实现快速、高效地对泄洪水面线进行动态观测。
以上结合附图对本发明的具体实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
- 一种免棱镜全站仪的泄洪水面线动态观测方法
- 一种枢纽工程泄洪消能工参数化动态设计方法