兼容式撑持台
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及撑持技术领域,具体涉及一种兼容式撑持台。
背景技术
现下,放置不大的原配件像光学反射件这样的撑持台均须安全操控,通常运用主动加厚回件架构整体操控,然而目前的主动加厚回件架构所占范围不小,另外撑持台和撑持台间纵向盖覆,即使形成了整体化的效果,但是无法真正防护撑持台和撑持台里的构件不会被剐蹭,常常使得构件的失效率增大,伴有不可靠的问题。
发明内容
为解决上述问题,本发明给予了一种兼容式撑持台,有效阻碍了现有技术中撑持台和撑持台间纵向盖覆无法真正防护撑持台和撑持台里的构件不会被剐蹭、使得构件的失效率增大、伴有不可靠的缺陷。
为了克服当下技术中的不足,本发明给予了一种兼容式撑持台的解决方案,具体如下:
一种兼容式撑持台,包括吊垂的撑持台主体2与撑持梁主体4。
所述撑持梁主体4经长方体状座体413、纵向排列在长方体状座体413里面的若干横向挡块413构成,所述横向挡块413把长方体状座体413自高而低划为若干储存独个撑持台的独个区域。
所述撑持梁主体4的正面壁与背面壁透设。
所述撑持梁主体4的两边镜像设置着纵向排列的并发移动的一对牵引马达5,所述牵引马达5的引导板和撑持梁主体4的边壁稳定固连,所述撑持台主体1相应的撑持梁主体4与牵引马达5的所在之处透设开孔,所述牵引马达5的引导口和撑持台主体1稳定固连。
所述撑持台主体1相对撑持梁主体4正面壁的所在之处设置着用来同横向挡块413中间相抵的横向撑持座6,所述横向撑持座6距离撑持梁主体4更远的一边设置着送货马达7,所述撑持台主体1相对撑持梁主体4背面壁的所在之处设置着下货马达3,所述送货马达7与下货马达3的牵引条尾部都面向撑持梁主体4。
所述横向撑持座6的横向跨度和撑持梁主体4独个区域的横向跨度适配,所述横向撑持座6的两边周沿与相对送货马达7两边的周沿分别设置着阻隔块8。
所述阻隔块8上朝上弯折为拱状,利于具体运作中的机器人的高低撑持台,来防止剐蹭撑持台;所述牵引马达5的高低两头分别设置着相对撑持梁主体4的接近开关,来达到接近止位;所述送货马达7与下货马达3分别为双向马达,来达成牢靠的牵引撑持台。
运用之际,撑持梁主体4的级数、范围、间隔能够凭借加工要求而定。
在撑持梁主体4未被填充齐撑持台之际,智能机器人朝撑持座6挪动撑持台,操纵牵引马达5牵引撑持梁主体4移动至运输独个区域和横向撑持座6相对,接着送货马达7运作,把撑持台移到撑持梁主体4的待撑持独个区域里;须下货之际,牵引马达5操纵撑持梁主体4抵达下货所在之处,下货马达3把撑持台经撑持梁主体4牵引到横向撑持座6,机器人把撑持台拿掉。
本发明的有益效果为:
本发明在撑持梁主体4未被填充齐撑持台之际,智能机器人朝撑持座6挪动撑持台,操纵牵引马达5牵引撑持梁主体4移动至运输独个区域和横向撑持座6相对,接着送货马达7运作,把撑持台移到撑持梁主体4的待撑持独个区域里;须下货之际,牵引马达5操纵撑持梁主体4抵达下货所在之处,下货马达3把撑持台经撑持梁主体4牵引到横向撑持座6,机器人把撑持台拿掉。
附图说明
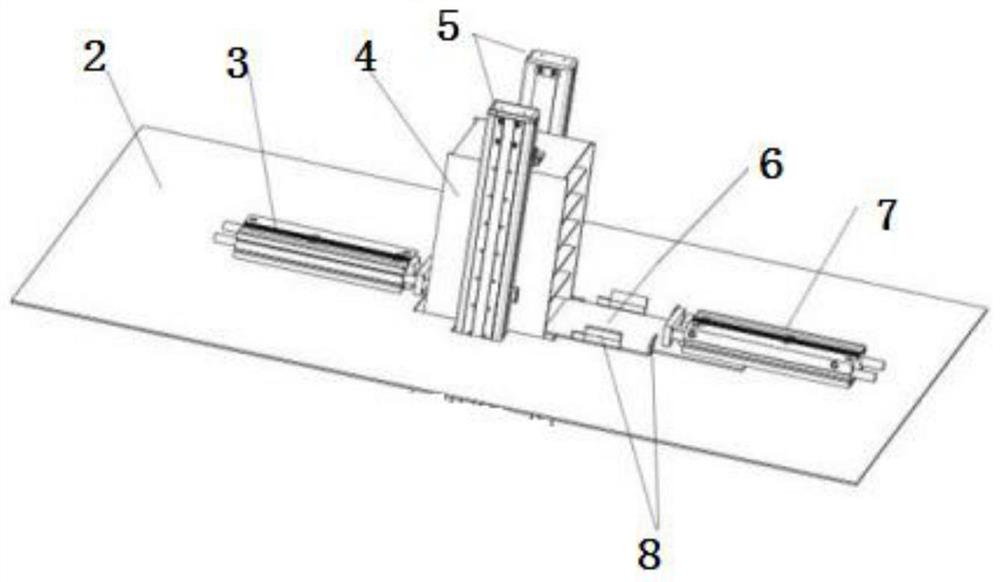
图1是本发明的兼容式撑持台的立体图。
图2是本发明的兼容式撑持台的部分示意图。
具体实施方式
下面将结合附图和方式对本发明做进一步地说明。
实施例1:
目前的主动加厚回件架构所占范围不小,另外撑持台和撑持台间纵向盖覆,即使形成了整体化的效果,但是无法真正防护撑持台和撑持台里的构件不会被剐蹭,常常使得构件的失效率增大,伴有不可靠的问题。如图1-图2所示,兼容式撑持台,包括吊垂的撑持台主体2与撑持梁主体4。
这里,所述撑持梁主体4经长方体状座体413、纵向排列在长方体状座体413里面的若干横向挡块413构成,所述横向挡块413把长方体状座体413自高而低划为若干储存独个撑持台的独个区域。
所述撑持梁主体4的正面壁与背面壁透设。
所述撑持梁主体4的两边镜像设置着纵向排列的并发移动的一对牵引马达5,所述牵引马达5的引导板和撑持梁主体4的边壁稳定固连,所述撑持台主体1相应的撑持梁主体4与牵引马达5的所在之处透设开孔,所述牵引马达5的引导口和撑持台主体1稳定固连。
所述撑持台主体1相对撑持梁主体4正面壁的所在之处设置着用来同横向挡块413中间相抵的横向撑持座6,所述横向撑持座6距离撑持梁主体4更远的一边设置着送货马达7,所述撑持台主体1相对撑持梁主体4背面壁的所在之处设置着下货马达3,所述送货马达7与下货马达3的牵引条尾部都面向撑持梁主体4。
所述横向撑持座6的横向跨度和撑持梁主体4独个区域的横向跨度适配,所述横向撑持座6的两边周沿与相对送货马达7两边的周沿分别设置着阻隔块8。
所述阻隔块8上朝上弯折为拱状,利于具体运作中的机器人的高低撑持台,来防止剐蹭撑持台;所述牵引马达5的高低两头分别设置着相对撑持梁主体4的接近开关,来达到接近止位;所述送货马达7与下货马达3分别为双向马达,来达成牢靠的牵引撑持台。
运用之际,撑持梁主体4的级数、范围、间隔能够凭借加工要求而定。
实施例2:
如图1-图2所示,兼容式撑持台,包括吊垂的撑持台主体2与撑持梁主体4。
这里,所述撑持梁主体4经长方体状座体413、纵向排列在长方体状座体413里面的若干横向挡块413构成,所述横向挡块413把长方体状座体413自高而低划为若干储存独个撑持台的独个区域。
所述撑持梁主体4的正面壁与背面壁透设。
所述撑持梁主体4的两边镜像设置着纵向排列的并发移动的一对牵引马达5,所述牵引马达5的引导板和撑持梁主体4的边壁稳定固连,所述撑持台主体1相应的撑持梁主体4与牵引马达5的所在之处透设开孔,所述牵引马达5的引导口和撑持台主体1稳定固连。
所述撑持台主体1相对撑持梁主体4正面壁的所在之处设置着用来同横向挡块413中间相抵的横向撑持座6,所述横向撑持座6距离撑持梁主体4更远的一边设置着送货马达7,所述撑持台主体1相对撑持梁主体4背面壁的所在之处设置着下货马达3,所述送货马达7与下货马达3的牵引条尾部都面向撑持梁主体4。
所述横向撑持座6的横向跨度和撑持梁主体4独个区域的横向跨度适配,所述横向撑持座6的两边周沿与相对送货马达7两边的周沿分别设置着阻隔块8。
所述阻隔块8上朝上弯折为拱状,利于具体运作中的机器人的高低撑持台,来防止剐蹭撑持台;所述牵引马达5的高低两头分别设置着相对撑持梁主体4的接近开关,来达到接近止位;所述送货马达7与下货马达3分别为双向马达,来达成牢靠的牵引撑持台。
运用之际,撑持梁主体4的级数、范围、间隔能够凭借加工要求而定。
在撑持梁主体4未被填充齐撑持台之际,智能机器人朝撑持座6挪动撑持台,操纵牵引马达5牵引撑持梁主体4移动至运输独个区域和横向撑持座6相对,接着送货马达7运作,把撑持台移到撑持梁主体4的待撑持独个区域里;须下货之际,牵引马达5操纵撑持梁主体4抵达下货所在之处,下货马达3把撑持台经撑持梁主体4牵引到横向撑持座6,机器人把撑持台拿掉。
以上以用方式说明的方式对本发明作了描述,本领域的技术人员应当理解,本公开不限于以上描述的方式,在不偏离本发明的范围的状态下,能够做出各种变化、变化和替换。
- 兼容式撑持台
- 用于火箭发动机的多型号兼容式高精度地面静止试验台