多段组合式及翼展折叠式水下机器人与运动方式
文献发布时间:2023-06-19 11:30:53
技术领域
本发明属于水下机器人应用技术领域,具体涉及一种多段组合式及翼展折叠式水下机器人与运动方式,主要根据应用要求通过分段式结构对机器人灵活组合以及通过翼展段的折叠式翼展结构使机器人在高机动性模式和滑翔模式中自由切换,通过翼展上的压电材料与洋流作用实现自充电。
技术背景
近年来,随着各国对海洋资源的重视与利用,水下机器人得到了广泛的应用,在民用方面,以水下勘测、救援打捞以及数据收集为主;在军用方面,作为航母舰群和潜艇舰群连接的桥梁以扩大作战范围以及跟踪目标、侦察扫雷等。水下机器人包括水下无人遥控潜水器、水下自主机器人以及水下滑翔机,操作方式又分为有缆和无缆,对于带机械手的水下无人遥控潜水器大多采用有缆操控以完成定点任务,对于可远距离长时间高速航行的水下自主机器人大多采用无缆操控。
目前水下水下滑翔机工作时长为半年左右,水下自主机器人单次工作时长仅为几十小时,且每次投放和回收都需要专门装置,不利于水下机器人执行长期任务且容易暴露目标。若将水下滑翔机的优点引入到水下自主机器人上,使其依靠翼展上浮下潜而不消耗自身携带能量,若机器人能够通过翼展上的压电材料在洋流作用下自发电为其上浮下潜供能,将能实现长期在水下工作。
天津大学的研究者设计了一种具备浮力驱动和螺旋桨驱动系统的混合驱动水下滑翔器海燕(PETREL),其结合了水下滑翔机(Autonomous Underwater Glider,AUG)和水下自主机器人(Autonomous Underwater Vehicle,AUV)的优点,但是该翼展为不可折叠的固定式翼展,对其机动性能和灵活性有影响,依靠浮力和重心调节改变机身姿态速度太慢且抗干扰性能力低,且不利于高速航行,且一体式结构不利于自由组合(武建国.混合驱动水下滑翔器系统设计与性能分析[D].天津大学,2010.)。三亚学院的研究者对新型水下机器人结构进行了相关设计研究,其通过净浮力调节装置实现上浮下潜以及悬停,机身两侧增加固定式机翼,通过重心调节装置改变俯仰角,固定式翼展虽然在低速航行时可以增加平稳性,但对机动性能有很大影响,依靠浮力和重心调节改变机身姿态速度太慢且抗干扰性能力低(辛光红,周密,杨波,等.新型复合式水下机器人设计研究[J].现代电子技术,2020,43(17):180-186)。加拿大The Memorial University of Newfoundland (MUN) 、NationalResearch Council Canada和美国TWR的研究人员在美国Webb Research公司生产的Slocum水下滑翔机尾部加装可折叠螺旋桨推进器,以增强在浅海运行的机动能力并拓展应用范围和海域,但不可折叠式翼展降低机动性和灵活性,且一体式结构不利于自由组合(Claus B,Bachmayer R,Cooney L.Analysis and development of a buoyancy-pitch based depthcontrol algorithm for a hybrid underwater glider[C].Autonomous UnderwaterVehivles(AUV),2012 IEEE/OES.IEEE,2012:1-6.)。天津大学的研究者对可变翼混合驱动水下滑翔机变体机翼系统展开了研究,其通过连杆机构实现机翼的展开和收缩,但是该变形翼每侧需用两个电机驱动且为转动和直线运动混合的展开,结构复杂,且不能改变机翼俯仰角,机翼向位置收缩后仍占据很大空间,而本发明中的机翼只需一个电机和一个舵机即可绕定点展开收缩和改变俯仰角,收缩后的机翼向机身后部靠拢且刚度较大(张明明.可变翼混合驱动水下滑翔机变体机翼系统研究[D].天津大学,2015.)。
目前关于兼有水下自主机器人和水下滑翔机的多段组合式及翼展水平折叠和上下翻转的水下机器人的整体设计研究尚未有报道。
发明内容
本发明的目的是延长水下机器人工作时长,结合翼展和压电材料在洋流作用下实现自充电,同时适应高速定深航行、上浮下潜航行、垂直上浮下潜、左转右转航行、原地左转右转、滑翔上浮下潜以及自充电七种运动方式,实现水下机器人多种运动姿态和长期工作,提供一种多段组合式及翼展折叠式水下机器人与运动方式。
上述多段组合式及翼展折叠式水下机器人,其特征在于:由前向后依次包括艏段、左右泵推段、上下泵推段、配重段、翼展段、控制段以及螺旋桨推进段;其中相邻段之间通过橡胶圈进行密封防水;上述艏段包括艏段壳体,艏段壳体为透明材质,内部安装探照灯和摄像头;上述左右泵推段包括左右泵推段壳体,左右泵推段壳体上设置有左孔和右孔,左右泵推段壳体左、右两侧分别安装右转喷泵和左转喷泵;其中右转喷泵出水口与上述左孔连接,左转喷泵出水口与上述右孔连接,可实现原地或小半径快速转弯且避免水流扰动影响;上述上下泵推段包括上下泵推段壳体,上下泵推段壳体上设置顶孔和底孔,上下泵推段壳体上、下侧分别安装下潜喷泵和上浮喷泵;其中下潜喷泵出水口与上述顶孔连接,上浮喷泵出水口与上述底孔连接,可实现快速上浮下潜且避免水流扰动影响;上述翼展段包括翼展段壳体,翼展段壳体内部前方固定安装有电机支座转动底座,翼展段壳体内部后方还安装有翼展上下偏转导轨;翼展段内还安装有电机支座,该电机支座前部固定安装一上下偏转舵机,上下偏转舵机输出轴与电机支座转动底座相连,上下偏转舵机与其输出轴是相对运动的,输出轴固定则上下偏转舵机带动电机支座绕输出轴转动,实现翼展的上扬下落;上述电机支座后端具有与上述翼展上下偏转导轨配合的T形结构;上述翼展段壳体左右两侧还分别设置翼展槽,翼展槽处安装翼展,翼展槽满足翼展展缩和上扬下落空间运动要求;翼展内侧边缘设置有前安装孔和后安装孔;上述翼展段壳体内还安装有翼展展缩驱动机构,所述翼展展缩驱动机构包括固定于上述电机支座上的螺纹推杆电机,还包括与螺纹推杆电机配合的翼展推杆法兰,螺纹推杆电机的转动变为翼展推杆法兰的直线运动,还包括第一端通过转动副与对应翼展内侧边缘的后安装孔连接、第二端通过转动副与翼展推杆法兰连接的翼展推杆;而对应翼展内侧边缘的前安装孔与电机支座连接并可绕其转动;上述控制段包括控制段壳体,以及安装于控制段壳体内的电池、无线通信模块、GPS/北斗定位模块和陀螺仪,控制段壳体内还可安装其他控制模块;上述螺旋桨推进段包括螺旋桨推进段壳体,和两个对称安装于螺旋桨推进段壳体左、右两侧的正桨螺旋桨推进器和反桨螺旋桨推进器,双桨驱动避免了角动量不平衡问题,水下机器人在启动和航行时不会发生翻转。
上述多段组合式及翼展折叠式水下机器人的运动方式,其特征在于包括以下过程:螺纹推杆电机正转,带动翼展推杆法兰向艉部移动,又通过直至翼展推杆带动翼展张开,称为翼展展开;螺纹推杆电机反转,带动翼展推杆法兰向艏部移动,又通过翼展推杆带动翼展收起,称为翼展收缩;上下偏转舵机正转,电机支座带动翼展的翼尖部位下落,称为翼展上扬;上下偏转舵机反转,电机支座带动翼展的翼尖部位上扬,称为翼展下落;第一种、高速定深航行:翼展处于收缩状态,水下机器人由待机状态切换为高速航行状态,高速定深前进航行时,螺旋桨推进段左端正桨螺旋桨推进器正转产生向后的推进力,右端反桨螺旋桨推进器反转转产生向后的推进力;正桨螺旋桨推进器和反桨螺旋桨推进器的转速在极短的时间内由零响应至最高,机器人前进航行速度在极短时间内由零响应至最大;高速定深后退航行时,螺旋桨推进段左端正桨螺旋桨推进器反转产生向前的推进力,右端反桨螺旋桨推进器正转产生向前的推进力;正桨螺旋桨推进器和反桨螺旋桨推进器的转速在极短的时间内由零响应至最高,机器人后退航行速度在极短时间内由零响应至最大;第二种、上浮下潜航行:翼展处于收缩状态,水下机器人由水平状态切换为艏段高于螺旋桨推进段状态,即为上浮状态,螺旋桨推进段左端正桨螺旋桨推进器正转产生向后的推进力,右端反桨螺旋桨推进器反转产生向后的推进力,上下泵推段的底部上浮喷泵启动产生向下的推力,上下泵推段受该推力反作用产生向上的力,机器人机身前半段向上倾斜至一定角度,正桨螺旋桨推进器正转和反桨螺旋桨推进器反转产生向后的推进力方向沿机器人机身侧线向后方向,机器人前高后低倾斜向上航行;水下机器人由水平状态切换为艏段低于螺旋桨推进段状态,即为下潜状态,螺旋桨推进段左端正桨螺旋桨推进器正转产生向后的推进力,右端反桨螺旋桨推进器反转产生向后的推进力,上下泵推段的顶部下潜喷泵启动产生向上的推力,上下泵推段受该推力反作用力产生向下的力, 机器人机身前半段向下倾斜至一定角度,正桨螺旋桨推进器正转和反桨螺旋桨推进器反转产生向后的推进力方向沿机器人机身侧线向后方向,机器人前高后低倾斜向下航行;第三种、垂直上浮下潜:翼展处于收缩状态,水下机器人由水平状态切换为艏段高于螺旋桨推进段状态,即为上浮状态,螺旋桨推进段左端正桨螺旋桨推进器和右端反桨螺旋桨推进器待机,上下泵推段的底部上浮喷泵启动产生向下的推力,上下泵推段受该推力反作用产生向上的力,机器人机身前半段向上倾斜至一定角度后开始以该姿态垂直上浮;水下机器人由水平状态切换为艏段低于螺旋桨推进段状态,即为下潜状态,螺旋桨推进段左端正桨螺旋桨推进器和右端反桨螺旋桨推进器待机,上下泵推段的上部下潜喷泵启动产生向上的推力,上下泵推段受该推力反作用产生向下的力,机器人机身前半段向下倾斜至一定角度后开始以该姿态垂直下潜;第四种、左转右转航行:翼展处于收缩状态,水下机器人由水平直线航行状态切换为艏段在螺旋桨推进段偏左状态,即为左转状态;螺旋桨推进段左端正桨螺旋桨推进器正转产生向后的推进力,右端反桨螺旋桨推进器反转产生向后的推进力,左右泵推段的右端左转喷泵启动产生向右的推力,左右泵推段受该推力反作用产生向左的力,机器人机身前半段向左偏转至一定角度,正桨螺旋桨推进器正转和反桨螺旋桨推进器反转产生向后的推进力方向沿机器人机身侧线向后方向,机器人前左后右倾斜向左航行;水下机器人由水平直线航行状态切换为艏段在螺旋桨推进段偏右状态,即为右转状态,螺旋桨推进段左端正桨螺旋桨推进器正转产生向后的推进力,右端反桨螺旋桨推进器反转产生向后的推进力,左右泵推段的左端右转喷泵启动产生向左的推力,左右泵推段受该推力反作用产生向右的力,机器人机身前半段向右偏转至一定角度,正桨螺旋桨推进器正转和反桨螺旋桨推进器反转产生向后的推进力方向沿机器人机身侧线向后方向,机器人前右后左倾斜向右航行;第五种、原地左转右转:翼展处于收缩状态,水下机器人由水平待机状态切换为艏段绕螺旋桨推进段向左转动状态,即为原地左转状态,螺旋桨推进段左端正桨螺旋桨推进器正转产生向后的推进力,右端反桨螺旋桨推进器正转产生向前的推进力,左右螺旋桨推力方向相反,左右泵推段的右端左转喷泵启动产生向右的推力,左右泵推段受该推力反作用产生向左的力,机器人连续原地左转,水下机器人由水平待机状态切换为艏段绕螺旋桨推进段向右转动状态,即为原地右转状态,螺旋桨推进段左端正桨螺旋桨推进器反转产生向前的推进力,右端反桨螺旋桨推进器反转产生向后的推进力,左右螺旋桨推力方向相反,左右泵推段的左端右转喷泵启动产生向左的推力,左右泵推段受该推力反作用产生向左的力,机器人连续原地右转;第六种、滑翔上浮下潜:翼展处于展开状态,水下机器人由水平状态切换为艏段高于螺旋桨推进段状态,即为滑翔上浮状态,螺旋桨推进段左端正桨螺旋桨推进器间歇低功率正转产生间歇向后的推进力,右端反桨螺旋桨推进器间歇低功率反转产生间歇向后的推进力,翼展展开并上扬使得机器人在流体中运动时,机器人在水下受流体作用机身前半段向上倾斜至一定角度,正桨螺旋桨推进器间歇低功率正转和反桨螺旋桨推进器间歇低功率反转产生向后的推进力方向沿机器人机身侧线向后方向,机器人前高后低倾斜向上滑翔,水下机器人由水平状态切换为艏段低于螺旋桨推进段状态,即为滑翔下潜状态,螺旋桨推进段左端正桨螺旋桨推进器间歇低功率正转产生间歇向后的推进力,右端反桨螺旋桨推进器间歇低功率反转产生间歇向后的推进力,翼展展开并下落使得机器人在流体中运动时,机器人在水下受流体作用机身前半段向下倾斜至一定角度,正桨螺旋桨推进器间歇低功率正转和反桨螺旋桨推进器间歇低功率反转产生向后的推进力方向沿机器人机身侧线向后方向,机器人前低后高倾斜向下滑翔;
上述多段组合式及翼展折叠式水下机器人,其特征在于:上述机器人艏段中的所述摄像头为一个,位于艏段内中心位置,为机器人提供水下视野以及避障测距等要求;所述探照灯为两个,分别位于艏段内部左右两侧,为摄像头工作提供辅助照明。
上述多段组合式及翼展折叠式水下机器人,其特征在于:上述控制段中的所述无线通信模块和GPS/北斗定位模块固定于控制段顶部突起部位,便于信号的传输,电池和陀螺仪固定在控制段中间位置,陀螺仪初始状态须保持水平。
上述多段组合式及翼展折叠式水下机器人,其特征在于:上述翼展外侧边缘安装有压电材料。
上述多段组合式及翼展折叠式水下机器人的运动方式,其特征在于包括以下过程:上述翼展外侧边缘安装有压电材料,以实现自充电过程:该过程中翼展处于展开状态,水下机器人通过切换水平状态为艏段高于螺旋桨推进段状态和艏段低于螺旋桨推进段状态来适应洋流的变化,通过翼展的上扬下落摆动使得机器人在洋流中呈波浪式运动,翼展上的压电材料受洋流冲击和振动产生电流,通过压电材料收集的电量为滑翔上浮下潜提供动力。
所述的一种多段组合式及翼展折叠式水下机器人与运动方式,针对高速定深航行、上浮下潜航行、垂直上浮下潜、左转右转航行和原地左转右转运动姿态,通过螺旋桨和上下左右喷泵实现高机动性运动;针对滑翔上浮下潜和自充电运动姿态,通过翼展和压电材料实现上浮下潜滑翔。
本发明与现有技术相比有如下优点:
1.本发明能够实现水下机器人按功能要求多段自由组合,安装方便;
2.本发明能够实现水下机器人通过折叠式翼展在高机动性运动和滑翔运动中自由切换,可实现水下自主机器人和水下滑翔机的功能;
3.本发明能够实现水下机器人通过展开翼展上的压电材料在与洋流的作用下进行自充电,为滑翔上浮下潜供能;
4.本发明能够实现水下机器人在翼展收缩状态下通过上下左右喷泵实现高机动性精确灵活运动;
5.本发明采用艏部泵喷方式为机器人转向和上浮下潜提供泵推力,避免了艏部采用螺旋桨推进转向和上浮下潜产生角动量的影响;
6.本发明中的折叠式翼展在机器人低速航行时可起到增稳的作用。
附图说明
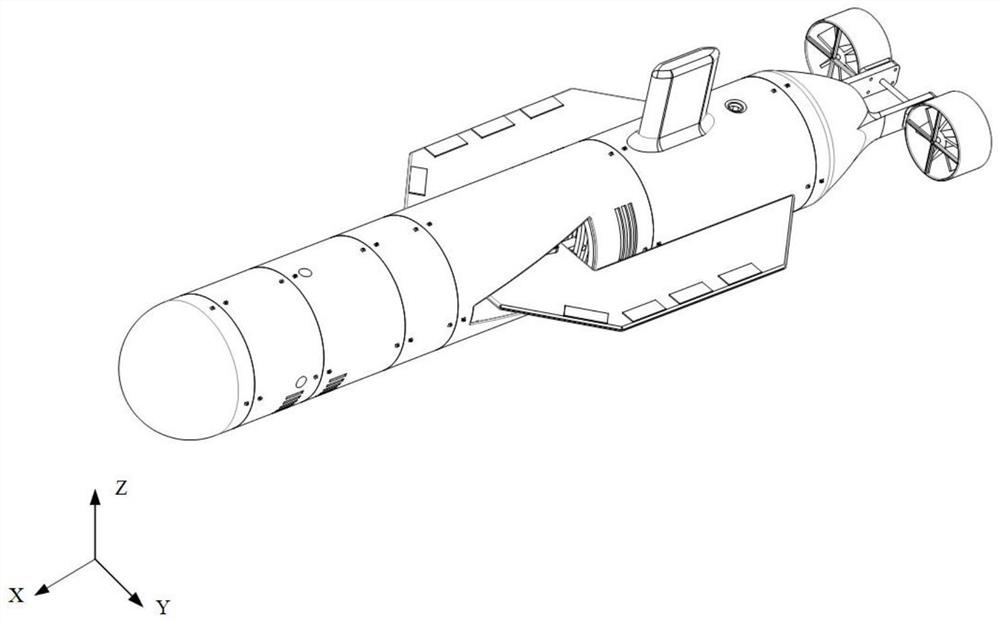
图1是本发明所述的一种多段组合式及翼展折叠式水下机器人翼展收缩状态下的三维视图;
图2是本发明所述的一种多段组合式及翼展折叠式水下机器人翼展展开状态下的三维视图;
图3是本发明所述的多段组合式及翼展折叠式水下机器人翼展展开状态下的爆炸图;
图4是本发明所述的机器人艏段的爆炸图;
图5是本发明所述的机器人左右泵推段的爆炸图;
图6是本发明所述的机器人上下泵推段的爆炸图;
图7是本发明所述的机器人翼展段的爆炸图;
图8是本发明所述的机器人控制段的爆炸图;
图9是本发明所述的机器人螺旋桨推进段的爆炸图;
图10是本发明所述的机器人在水下高速前进航行的三维视图;
图11是本发明所述的机器人在水下高速后退航行的三维视图;
图12是本发明所述的机器人在水下水平航行的三维视图;
图13是本发明所述的机器人在水下上浮航行的三维视图;
图14是本发明所述的机器人在水下水平航行的三维视图;
图15是本发明所述的机器人在水下下潜航行的三维视图;
图16是本发明所述的机器人在水下水平待机的三维视图;
图17是本发明所述的机器人在水下垂直上浮的三维视图;
图18是本发明所述的机器人在水下水平待机的三维视图;
图19是本发明所述的机器人在水下垂直下潜的三维视图;
图20是本发明所述的机器人在水下直线航行的三维视图;
图21是本发明所述的机器人在水下左转航行的三维视图;
图22是本发明所述的机器人在水下直线航行的三维视图;
图23是本发明所述的机器人在水下右转航行的三维视图;
图24是本发明所述的机器人在水下待机状态下的三维视图;
图25是本发明所述的机器人在水下原地左转的三维视图;
图26是本发明所述的机器人在水下待机状态下的三维视图;
图27是本发明所述的机器人在水下原地右转的三维视图;
图28是本发明所述的机器人在无动力状态下水平滑翔的三维视图;
图29是本发明所述的机器人在无动力状态下上浮滑翔的三维视图;
图30是本发明所述的机器人在无动力状态下上浮滑翔时翼展的三维视图;
图31是本发明所述的机器人在无动力状态下水平滑翔的三维视图;
图32是本发明所述的机器人在无动力状态下下潜滑翔的三维视图;
图33是本发明所述的机器人在无动力状态下下潜滑翔时翼展的三维视图;
图34是本发明所述的机器人在无动力状态下自充电运动的三维视图;
图1-34中标号名称:A、艏段;B、左右泵推段;C、上下泵推段;D、翼展段;E、控制段;F、螺旋桨推进段;1、橡胶圈;2、配重段;3、探照灯;4、摄像头;5、艏段壳体;6、右转喷泵;7、左右泵推段壳体;8、左转喷泵;9、上浮喷泵;10、上下泵推段壳体;11、下潜喷泵;12、压电材料;13、翼展;14、翼展推杆;15、翼展上下偏转导轨;16、翼展段壳体;17、翼展推杆法兰;18、螺纹推杆电机;19、电机支座;20、上下偏转舵机;21、电机支座转动底座;22、控制段壳体;23、GPS/北斗定位模块;24、无线通信模块;25、陀螺仪;26、电池;27、正桨螺旋桨推进器;28、反桨螺旋桨推进器;29、螺旋桨推进段壳体。
具体实施方式
下面结合附图和具体实施案例对本发明作进一步详细说明:
结合图1-34,本发明的目的在于提供一种多段组合式及翼展折叠式水下机器人,其特征在于:由前向后依次包括艏段A、左右泵推段B、上下泵推段C、配重段2、翼展段D、控制段E以及螺旋桨推进段F;其中相邻段之间通过橡胶圈1进行密封防水;
上述艏段A包括艏段壳体5,艏段壳体5为透明材质,内部安装探照灯3和摄像头4;
上述左右泵推段B包括左右泵推段壳体7,左右泵推段壳体7上设置有左孔和右孔,左右泵推段壳体7左、右两侧分别安装右转喷泵6和左转喷泵8;其中右转喷泵6出水口与上述左孔连接,左转喷泵8出水口与上述右孔连接;
上述上下泵推段C包括上下泵推段壳体10,上下泵推段壳体10上设置顶孔和底孔,上下泵推段壳体10上、下侧分别安装下潜喷泵11和上浮喷泵9;其中下潜喷泵11出水口与上述顶孔连接,上浮喷泵9出水口与上述底孔连接;
上述翼展段D包括翼展段壳体16,翼展段壳体16内部前方固定安装有电机支座转动底座21,翼展段壳体16内部后方还安装有翼展上下偏转导轨15;翼展段D内还安装有电机支座19,该电机支座19前部固定安装一上下偏转舵机20,上下偏转舵机20输出轴与电机支座转动底座21相连;上述电机支座19后端具有与上述翼展上下偏转导轨15配合的T形结构;上述翼展段壳体16左右两侧还分别设置翼展槽,翼展槽处安装翼展13;翼展13内侧边缘设置有前安装孔和后安装孔;上述翼展段壳体16内还安装有翼展展缩驱动机构,所述翼展展缩驱动机构包括固定于上述电机支座19上的螺纹推杆电机18,还包括与螺纹推杆电机18配合的翼展推杆法兰17,还包括第一端通过转动副与对应翼展13内侧边缘的后安装孔连接、第二端通过转动副与翼展推杆法兰17连接的翼展推杆14;而对应翼展13内侧边缘的前安装孔与电机支座19连接并可绕其转动;
上述控制段E包括控制段壳体22,以及安装于控制段壳体22内的电池26、无线通信模块24、GPS/北斗定位模块23和陀螺仪25;
上述螺旋桨推进段F包括螺旋桨推进段壳体29,和两个对称安装于螺旋桨推进段壳体29左、右两侧的正桨螺旋桨推进器27和反桨螺旋桨推进器28。
本发明的目的在于提供一种多段组合式及翼展折叠式水下机器人,其特征在于:上述机器人艏段A中的所述摄像头4为一个,位于艏段A内中心位置;所述探照灯3为两个,分别位于艏段A内部左右两侧。
本发明的目的在于提供一种多段组合式及翼展折叠式水下机器人,其特征在于:上述控制段E中的所述无线通信模块24和GPS/北斗定位模块23固定于控制段E顶部突起部位,电池26和陀螺仪25固定在控制段E中间位置。
本发明的目的在于提供一种多段组合式及翼展折叠式水下机器人,其特征在于:上述翼展13外侧边缘安装有压电材料12。
本发明的目的在于提供一种多段组合式及翼展折叠式水下机器人的运动方式,其特征在于包括以下过程:
螺纹推杆电机18正转,带动翼展推杆法兰17向艉部移动,又通过直至翼展推杆14带动翼展13张开,称为翼展展开;
螺纹推杆电机18反转,带动翼展推杆法兰17向艏部移动,又通过翼展推杆14带动翼展13收起,称为翼展收缩;
上下偏转舵机20正转,电机支座19带动翼展13的翼尖部位下落,称为翼展上扬;
上下偏转舵机20反转,电机支座19带动翼展13的翼尖部位上扬,称为翼展下落;
第一种、高速定深航行:翼展13处于收缩状态,水下机器人由待机状态切换为高速航行状态,高速定深前进航行时,螺旋桨推进段F左端正桨螺旋桨推进器27正转产生向后的推进力,右端反桨螺旋桨推进器28反转转产生向后的推进力;正桨螺旋桨推进器27和反桨螺旋桨推进器28的转速在极短的时间内由零响应至最高,机器人前进航行速度在极短时间内由零响应至最大;高速定深后退航行时,螺旋桨推进段F左端正桨螺旋桨推进器27反转产生向前的推进力,右端反桨螺旋桨推进器28正转产生向前的推进力;正桨螺旋桨推进器27和反桨螺旋桨推进器28的转速在极短的时间内由零响应至最高,机器人后退航行速度在极短时间内由零响应至最大;
第二种、上浮下潜航行:翼展13处于收缩状态,水下机器人由水平状态切换为艏段A高于螺旋桨推进段F状态,即为上浮状态,螺旋桨推进段F左端正桨螺旋桨推进器27正转产生向后的推进力,右端反桨螺旋桨推进器28反转产生向后的推进力,上下泵推段C的底部上浮喷泵9启动产生向下的推力,上下泵推段C受该推力反作用产生向上的力, 机器人机身前半段向上倾斜至一定角度,正桨螺旋桨推进器27正转和反桨螺旋桨推进器28反转产生向后的推进力方向沿机器人机身侧线向后方向,机器人前高后低倾斜向上航行;水下机器人由水平状态切换为艏段A低于螺旋桨推进段F状态,即为下潜状态,螺旋桨推进段F左端正桨螺旋桨推进器27正转产生向后的推进力,右端反桨螺旋桨推进器28反转产生向后的推进力,上下泵推段C的顶部下潜喷泵11启动产生向上的推力,上下泵推段C受该推力反作用力产生向下的力, 机器人机身前半段向下倾斜至一定角度,正桨螺旋桨推进器27正转和反桨螺旋桨推进器28反转产生向后的推进力方向沿机器人机身侧线向后方向,机器人前高后低倾斜向下航行;
第三种、垂直上浮下潜:翼展13处于收缩状态,水下机器人由水平状态切换为艏段A高于螺旋桨推进段F状态,即为上浮状态,螺旋桨推进段F左端正桨螺旋桨推进器27和右端反桨螺旋桨推进器28待机,上下泵推段C的底部上浮喷泵9启动产生向下的推力,上下泵推段C受该推力反作用产生向上的力,机器人机身前半段向上倾斜至一定角度后开始以该姿态垂直上浮;水下机器人由水平状态切换为艏段A低于螺旋桨推进段F状态,即为下潜状态,螺旋桨推进段F左端正桨螺旋桨推进器27和右端反桨螺旋桨推进器28待机,上下泵推段C的上部下潜喷泵11启动产生向上的推力,上下泵推段C受该推力反作用产生向下的力,机器人机身前半段向下倾斜至一定角度后开始以该姿态垂直下潜;
第四种、左转右转航行:翼展13处于收缩状态,水下机器人由水平直线航行状态切换为艏段A在螺旋桨推进段F偏左状态,即为左转状态;螺旋桨推进段F左端正桨螺旋桨推进器27正转产生向后的推进力,右端反桨螺旋桨推进器28反转产生向后的推进力,左右泵推段B的右端左转喷泵8启动产生向右的推力,左右泵推段B受该推力反作用产生向左的力,机器人机身前半段向左偏转至一定角度,正桨螺旋桨推进器27正转和反桨螺旋桨推进器28反转产生向后的推进力方向沿机器人机身侧线向后方向,机器人前左后右倾斜向左航行;水下机器人由水平直线航行状态切换为艏段A在螺旋桨推进段F偏右状态,即为右转状态,螺旋桨推进段F左端正桨螺旋桨推进器27正转产生向后的推进力,右端反桨螺旋桨推进器28反转产生向后的推进力,左右泵推段B的左端右转喷泵6启动产生向左的推力,左右泵推段B受该推力反作用产生向右的力,机器人机身前半段向右偏转至一定角度,正桨螺旋桨推进器27正转和反桨螺旋桨推进器28反转产生向后的推进力方向沿机器人机身侧线向后方向,机器人前右后左倾斜向右航行;
第五种、原地左转右转:翼展13处于收缩状态,水下机器人由水平待机状态切换为艏段A绕螺旋桨推进段F向左转动状态,即为原地左转状态,螺旋桨推进段F左端正桨螺旋桨推进器27正转产生向后的推进力,右端反桨螺旋桨推进器28正转产生向前的推进力,左右螺旋桨推力方向相反,左右泵推段B的右端左转喷泵8启动产生向右的推力,左右泵推段B受该推力反作用产生向左的力,机器人连续原地左转,水下机器人由水平待机状态切换为艏段A绕螺旋桨推进段F向右转动状态,即为原地右转状态,螺旋桨推进段F左端正桨螺旋桨推进器27反转产生向前的推进力,右端反桨螺旋桨推进器28反转产生向后的推进力,左右螺旋桨推力方向相反,左右泵推段B的左端右转喷泵6启动产生向左的推力,左右泵推段B受该推力反作用产生向左的力,机器人连续原地右转;
第六种、滑翔上浮下潜:翼展13处于展开状态,水下机器人由水平状态切换为艏段A高于螺旋桨推进段F状态,即为滑翔上浮状态,螺旋桨推进段F左端正桨螺旋桨推进器27间歇低功率正转产生间歇向后的推进力,右端反桨螺旋桨推进器28间歇低功率反转产生间歇向后的推进力,翼展展开并上扬使得机器人在流体中运动时,机器人在水下受流体作用机身前半段向上倾斜至一定角度,正桨螺旋桨推进器27间歇低功率正转和反桨螺旋桨推进器28间歇低功率反转产生向后的推进力方向沿机器人机身侧线向后方向,机器人前高后低倾斜向上滑翔,水下机器人由水平状态切换为艏段A低于螺旋桨推进段F状态,即为滑翔下潜状态,螺旋桨推进段F左端正桨螺旋桨推进器27间歇低功率正转产生间歇向后的推进力,右端反桨螺旋桨推进器28间歇低功率反转产生间歇向后的推进力,翼展展开并下落使得机器人在流体中运动时,机器人在水下受流体作用机身前半段向下倾斜至一定角度,正桨螺旋桨推进器27间歇低功率正转和反桨螺旋桨推进器28间歇低功率反转产生向后的推进力方向沿机器人机身侧线向后方向,机器人前低后高倾斜向下滑翔;
本发明的目的在于提供一种多段组合式及翼展折叠式水下机器人的运动方式,其特征在于包括以下过程:
上述翼展13外侧边缘安装有压电材料12,以实现自充电过程:
该过程中翼展13处于展开状态,水下机器人通过切换水平状态为艏段A高于螺旋桨推进段F状态和艏段A低于螺旋桨推进段F状态来适应洋流的变化,通过翼展13的上下摆动使得机器人在洋流中呈波浪式运动,翼展13上的压电材料12受洋流冲击和振动产生电流,通过压电材料12收集的电量为滑翔上浮下潜提供动力。
- 多段组合式及翼展折叠式水下机器人与运动方式
- 一种基于电缆段运动状态的水下机器人定位方法