一种飞行器全域管理方法和系统
文献发布时间:2023-06-19 12:13:22
技术领域
本发明涉及飞行器领域,特别是一种飞行器全域管理方法和系统。
背景技术
近些年,无人机技术和无人机产品得到空前发展,并已渗透到百姓日常生 活和军事应用的方方面面。相对于无人机的发展,无人机空管技术却大大落后 于无人机技术发展,导致天上无人机黑飞,职能部门束手无策,这种现状反过 来影响和束缚了无人机的进一步普及和发展。目前航空器/飞行器都是通过 ADS-B进行位置播报,这种方式需要地面台站支持,只能起到近距监管或防撞 告警作用,对全程监管无能为力。
ADS-B是一种广播式自动相关监视系统,由机载端和地面站构成系统,机 载端机广播式的发送飞机位置经纬度高度速度航向等信息,地面站端机接收并 显示在空管屏幕上,再结合无线电话音方式完成对有人机的飞行引导与管理。 有些地区也尝试把ADS-B系统引入无人机空管管理,但推进效果不理想,原因 之一是ADS-B系统设备较昂贵,相比于几千元的无人机,一套ADS-B机载端 机一般要4~5万元,推广成本很高;同时ADS-B还有一个致命缺陷,就是他需 要地面站接收。而地面台站的布局是以民航机场为中心的布设,所以不能覆盖 无人机的广大飞机地区,这也是造成有人机的以ADS-B为核心的空管管理系统一直没有在无人机上普及的一个重要原因。
目前无人机厂商广泛采用公网监视管理方式;主要利用了移动网络技术和 GPS定位技术,但是目前移动网络做不到全覆盖,只是在城市和人口稠密地区 有较好的覆盖,而无人机作业的巡线、森林防护等广大地区做不到网络覆盖, 所以也无法据此进行无人机的空管管理。
发明内容
本发明针对上述现有技术存在的问题,提供了一种飞行器全域管理方法和 系统,实现对飞行器飞行信息采集获取,以及不受地域限制的广播发送,本发 明也不需ADS-B地面台站支持。
本发明公开了一种飞行器全域管理方法,包括:
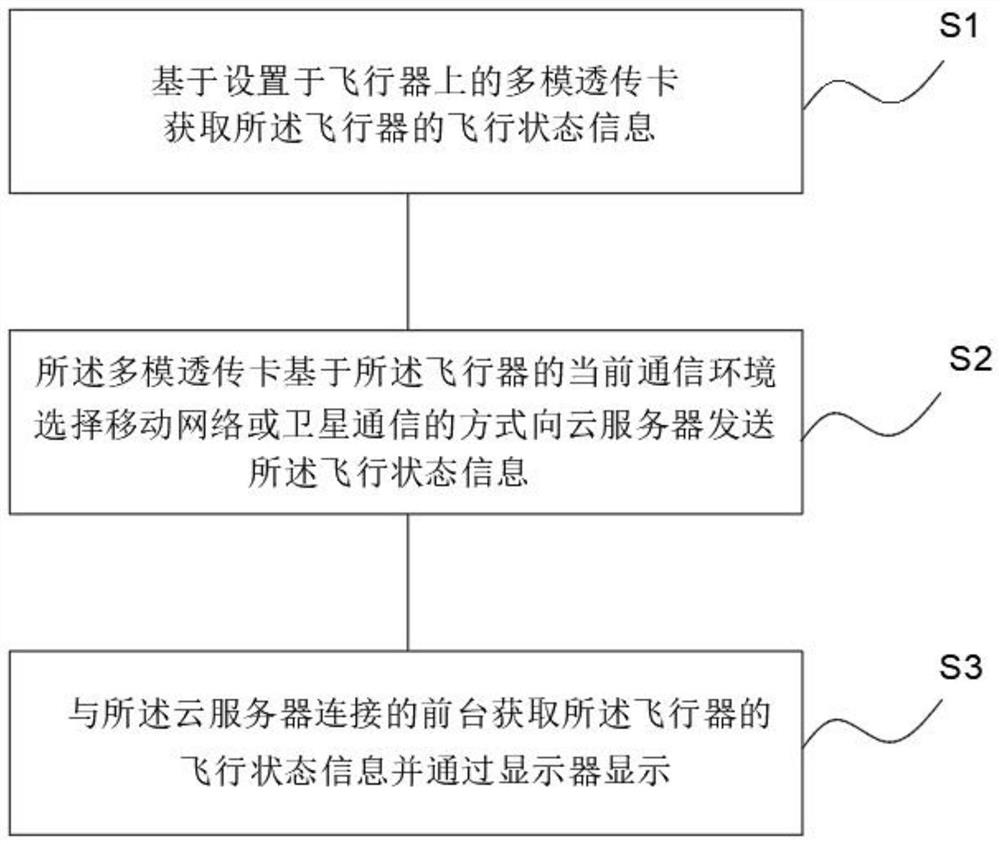
S1:基于设置于飞行器上的多模透传卡获取所述飞行器的飞行状态信息;
S2:所述多模透传卡基于所述飞行器的当前通信环境,选择移动网络或卫 星通信的方式向云服务器发送所述飞行状态信息;
S3:与所述云服务器连接的前台获取所述飞行器的飞行状态信息并通过显 示器显示。
进一步地,所述步骤S1中,所述飞行状态信息还包括:飞行器的自身状态 信息;
所述步骤S1还包括:
通过多模透传卡的上位机通信模块获取飞行器计算机传输的所述飞行器的 自身状态信息。
进一步地,所述步骤S1之前还包括:
通过串口对所述多模透传卡的Flash存储器设置反映所在所述飞行器的身 份且不可更改的所述飞行器号和ICAO号;
所述步骤S1包括:
通过所述多模透传卡的GPS/北斗模块检测所述飞行器的位置经纬度信息、 飞行高度信息、速度信息、航向信息;
通过所述多模透传卡的陀螺模块检测所述飞行器的姿态角、角速度和三轴 加速度信息;
所述多模透传卡的主控制器对包括所述GPS/北斗模块和所述陀螺模块检 测得到的信息在内的飞行状态信息以及所述飞行器号加密;
其中,所述多模透传卡还用于对来自云服务器的上行数据或指令进行解密。
进一步地,所述步骤S2包括:
判断所述飞行器是否连接移动网络;
若是,则通过所述多模透传卡的移动网络模块,向所述云服务器发送所述 飞行状态信息和所述飞行器号;若否,则通过所述多模透传卡的卫星模块,向 所述云服务器发送所述飞行状态信息和所述飞行器号;
所述步骤S2还包括:
所述云服务器对所述多模透传卡发送的所述飞行器号和飞行状态信息进行 解密并保存在数据库;
所述云服务器读取所述数据库并筛选所述飞行状态信息和所述飞行器号发 送至所述前台;
其中,所述云服务器还用于对发往多模透传卡的上行数据或指令进行加密。
进一步地,该方法还包括:
用户通过所述前台发送控制指令至所述云服务器;
云服务器通过移动网络和卫星通信方式同时向多模透传卡发送所述控制指 令;
所述多模透传卡基于所述飞行器的当前通信环境,自动选择移动网络或卫 星通信的方式接收所述云服务器发送所述控制指令;
所述多模透传卡通过上位机通信模块发送所述控制指令至所述飞行器计算 机,使得所述飞行器接收并实施所述控制指令。
本发明还公开了一种飞行器全域管理系统,包括机载端机、云服务器和前 台,所述云服务器和所述前台通信连接;
其中,设置于飞行器上的所述机载端机包括多模透传卡,所述多模透传卡 包括主控制器,以及分别与所述主控制器连接的:
GPS/北斗模块,用于检测包括所述飞行器的位置经纬度、飞行高度、速度、 航向;
陀螺模块,用于检测所述飞行器的姿态角、角速度和三轴加速度;
通信模块,包括分别与所述主控制器连接的移动网络模块和卫星模块,用 于根据所述飞行器当前的通信环境,通过移动网络或卫星通信的方式与云服务 器建立通信连接。
进一步地,所述多模透传卡还包括与所述主控制器连接的上位机通信模块, 用于与飞行器计算机建立通信连接,以获取所述飞行器的自身状态信息,或者, 向飞行器的计算机发送控制指令。
进一步地,所述上位机通信模块包括分别与所述主控制器连接的:485通 信单元、以太网通信单元和CAN总线通信单元。
进一步地,所述机载端机还包括:与所述多模透传卡连接的支持宽范围电 压9V~36V的电源模块,所述电源模块拥有三种天线,包括:卫星全向天线、 4G天线,GPS/北斗天线。
进一步地,所述前台包括分别通过有线/无线网络与所述云服务器连接的移 动终端和监控中心;
所述前台包括显示器,用于根据云服务器发送的数据在空管地图上或卫星 地图上显示所述飞行器的位置及相应的参数。
本发明至少具有以下有益效果:
本发明利用卫星电话和移动公网,并集成GPS和北斗芯片的自相关广播式 信息报告发布设备很好的解决了无人机飞行信息采集获取难、广播发送受地域 限制的问题,并且本发明不需要传统的地面台站支持,节约了成本。
本发明的其他有益效果将在具体实施方式部分详细说明。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施 例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述 中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付 出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本发明优选实施例公开飞行器全域管理方法的方法流程图。
图2是本发明优选实施例公开飞行器全域管理系统的独立型机载端机的结 构框图。
图3是本发明优选实施例公开飞行器全域管理系统的交联型机载端机的结 构框图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方 案进行详细的描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不 是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创 造性劳动的前提下所得到的所有其它实施方式,都属于本发明所保护的范围。
如图1所示,本发明公开了一种飞行器全域管理方法,包括:
S1:基于设置于飞行器上的多模透传卡获取所述飞行器的飞行状态信息。
S2:所述多模透传卡基于所述飞行器的当前通信环境,选择移动网络或卫 星通信的方式向云服务器发送所述飞行状态信息。
S3:与所述云服务器连接的前台获取所述飞行器的飞行状态信息并通过显 示器显示。
在本发明的一些实施例中,
所述步骤S1之前还包括:通过串口对所述多模透传卡的Flash存储器设置 反映所在所述飞行器的身份且不可更改的所述飞行器号和ICAO号,ICAO (International CivilAviation Organization)指国际民用航空组织。由于本发明能 够同时支持多个在飞的飞行器的管理,通过飞行器的唯一的飞行器号可以确定 飞行器的身份,这样云服务器便可以将接收到的飞行状态信息等与飞行器相匹 配,了解所接收到的数据具体属于哪一个飞行器。
所述步骤S1包括:
通过所述多模透传卡的GPS/北斗模块检测所述飞行器的位置经纬度信息、 飞行高度信息、速度信息、航向信息;
通过所述多模透传卡的陀螺模块检测所述飞行器的三轴加速度信息和角速 度信息;
所述多模透传卡的主控制器对包括所述GPS/北斗模块和所述陀螺模块检 测得到的信息在内的飞行状态信息加密。值得一提的是,所述多模透传卡的主 控制器还能用于对来自云服务器的上行数据和指令进行解密。
在本发明的一些实施例中,所述步骤S2包括:
判断所述飞行器是否连接移动网络;
若是,则通过所述多模透传卡的移动网络模块,向所述云服务器发送所述 飞行状态信息;若否,则通过所述多模透传卡的卫星模块,向所述云服务器发 送所述飞行状态信息。
值得一提的是,对于包括多飞行器同时在飞等其他可能出现的情况下,为 了更好的对飞行器进行管理,多模透传卡在使用移动网络或卫星通信方式发送 飞行状态信息的同时,还应当发送所述飞行器号和/或ICAO号。
所述步骤S2还包括:
所述云服务器对所述多模透传卡发送的所述飞行器号和所述飞行状态信息 进行解密并保存在数据库;
所述云服务器读取数据库并筛选所述飞行器号和所述飞行状态信息发送至 所述前台。其中,所述云服务器还能够用于对发往多模透传卡的上行数据或指 令进行加密。
在本发明的一些实施例中,该方法还包括:
用户通过所述前台发送控制指令至所述云服务器;
云服务器通过移动网络和卫星通信方式同时向多模透传卡发送所述控制指 令;
所述多模透传卡基于所述飞行器的当前通信环境,自动选择移动网络或卫 星通信的方式接收所述云服务器发送所述控制指令;
所述多模透传卡通过上位机通信模块发送所述控制指令至所述飞行器计算 机,使得所述飞行器接收并实施所述控制指令,实现了对飞行器的远程控制。
多模透传卡是机载端机的重要组成部分,机载端机设置于飞行器上,本发 明所采用的机载端机包括两种类型:独立型和交联型,上述各实施例公开了适 用于独立型机载端机的方法,本发明还公开了适用于交联型机载端机的方法, 其与独立型机载端机的方法的主要区别在于:所述步骤S1中,所述飞行状态信 息还包括:飞行器的自身状态信息,例如,无人机剩余电流等设备信息。所述 步骤S1还包括:通过多模透传卡的上位机通信模块获取飞行器计算机传输的所 述飞行器的自身状态信息。
本发明还公开了一种飞行器全域管理系统,能够适用于上述各实施例公开 的飞行器全域管理方法,该系统包括机载端机、云服务器和前台,所述云服务 器和所述前台通信连接。本发明公开的前台区别于传统的ADS-B地面接收站, 前台仅需能够数据处理设备即可,例如PC计算机、手机等,且对人工操作依 赖度较小,极大节约了经济成本和人力成本。
设置于飞行器上的所述机载端机包括多模透传卡,所述多模透传卡包括主 控制器,其可以采用现有型号的单片机,能够实现对数据转换、加密、解析、 打包以及其他的数据相关处理功能、接口通讯管理等。多模透传卡还包括分别 与所述主控制器连接的:
GPS/北斗模块,用于检测包括所述飞行器的位置经纬度、飞行高度、速度、 航向;该模块集成了北斗和GPS双系统导航定位功能,能够支持BDS-B1、 GPS-L1两个频点,可以单独切换使用或同时北斗以及GPS定位模式。
陀螺模块,用于检测所述飞行器的姿态角、角速度和三轴加速度。优选的, 采用六轴航姿芯片,使得机载端机能正确读取飞行姿态信息。
通信模块,包括分别与所述主控制器连接的移动网络模块和卫星模块,用 于根据所述飞行器当前的通信环境,通过移动网络或卫星通信的方式与云服务 器建立通信连接。多模透传卡集成了卫星和移动通讯,所在地区或区域无论是 否覆盖移动网络信号(2G、3G、4G、5G)的情况下都能正常将数据发到云服 务器。
在本发明的一些实施例中,所述上位机通信模块包括分别与所述主控制器 连接的:485通信单元、以太网通信单元和CAN总线通信单元。其分别通过 485通讯、以太网通讯和CAN总线通讯的方式实现与无人机(飞行器)计算机 通讯,完成上行和下行数据传输。
在本发明的一些实施例中,所述机载端机还包括:与所述多模透传卡连接 的支持宽范围电压9V~36V的电源模块,所述电源模块拥有三种天线,包括: 卫星全向天线、4G天线,GPS/北斗天线。
在本发明的一些实施例中,所述前台包括分别通过有线/无线网络与所述云 服务器连接的移动终端和监控中心。优选的,前台需要通过验证用户对应的账 号密码等相关方式来验证身份后登陆云服务器,用户的身份可以指定权限,来 确定可以查看那个或那些飞行器。
所述前台包括具有数据处理能力的主机和显示器(如PC计算机),用于 根据云服务器发送的数据在空管地图或卫星地图上显示所述飞行器的位置及相 应的参数。飞行器位置主要是根据多模透传卡检测的经纬度确定的,飞行器相 应的参数包括多模透传卡检测的高度、速度、航向等。
上述各实施例公开的结构适用于独立型机载端机,其结构如图2所示。具 体实施时,需要把独立型机载端机放置在无人机上,随着无人机的飞行,其所 在局域为有无公网任意空域,独立型机载端机的GPS/北斗模块实时给出无人机 位置经纬度、高度、速度、航向信息,通过多模透传卡发送到云服务器;同时 在地面控制中心或监控中心通过互联网前台访问服务器,在地图界面上实时显 示由多模透传卡传回的无人机参数。
如图3所示,本发明还公开了交联型机载端机,其与独立型机载端机的主 要区别在于,交联型机载端机的多模透传卡还包括与所述主控制器连接的上位 机通信模块,用于与飞行器的计算机建立通信连接,以获取所述飞行器的自身 状态信息,或者,向飞行器的计算机发送控制指令。
具体实施时,把交联型机载端机放置在无人机上,需与无人机载计算机完 成通讯互联。在无人机进入有无公网任意空域后,交联型机载端机通过交联串 口接收无人机载计算机发送的飞机余油或剩余电量及设备状态等信息;与自身 GPS/北斗模块实时给出无人机位置经纬度、高度、速度、航向信息打包,一起 通过多模透传卡发送到云服务器;在地面控制中心通过互联网前台访问服务器, 在地图界面上实时显示由多模透传卡传回的无人机参数和余油剩余电量等信 息;同时地面控制中心可以发送一次性控制指令通过云服务器到交联型机载端 机,交联型机载端机解析后通过串口发送给无人机载计算机,最终控制飞机执 行地面站发送的相关命令。
上述各实施例中,多模透传卡与服务器可以实现双向通信,并且所传输的 数据能够在源端加密,在另一端解密。值得一提的是,本发明中涉及到的对数 据的加密解密,均可以采用现有的加密解密方法,本文不再赘述。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于 此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到 变化或替换,都应涵盖在本发明的保护范围之内。
- 一种飞行器全域管理方法和系统
- 一种安全域管理方法、装置及系统