腕垫
文献发布时间:2023-06-19 12:25:57
技术领域
各种实施例总体涉及腕垫。特别地,各种实施例总体涉及具有触觉反馈的腕垫。
背景技术
近年来,具有内置触觉反馈的游戏输入设备,例如键盘、鼠标、游戏手柄、操纵杆等,已在游戏玩家中变得越来越流行,因为这些装置增强了游戏玩家与游戏环境互动的体验。随着用于游戏输入设备的内置触觉反馈的成功,制造商正朝着将内置触觉反馈引入其他游戏配件(例如腕垫)的方向发展。
举例而言,美国专利第US 7,106,305号揭示了一种腕垫,该腕垫包括用于向使用者提供触觉反馈的一个或多个致动器。然而,在该美国专利中,致动器耦接至腕垫的外壳,且致动器直接向外壳施加力,使得该力作为触觉反馈传递给与外壳接触的使用者。因此,腕垫的整个外壳将振动以产生触觉反馈。以这种原始且粗糙的方式在腕垫中提供触觉反馈可能并不理想,因为这可能会使使用者感到不适,或甚至可能干扰试图控制游戏输入设备的使用者。另外,在整个腕垫振动的情况下,腕垫可能会沿桌子的表面移动,且若无人看管,则腕垫可能从桌子上掉落。
另一方面,其他常见的触觉反馈技术涉及相对于外壳直接移动触觉元件(用户接触该触觉元件)以经由触觉元件传递触觉感觉,上述触觉反馈技术可能也不适用于腕垫,因为这需要使腕垫的整个垫子直接相对于腕垫的外壳移动。以这种基本且原始的方式在腕垫中产生触觉反馈将致使腕垫的垫子直接摩擦使用者的皮肤,这可能会引起不适并可能干扰试图控制游戏输入设备的使用者。因此,在腕垫中直接应用此类常见的触觉反馈技术也是不理想的。
因此,需要一种在腕垫中产生触觉反馈的精密且精细的解决方案,该解决方案可以使不适和/或对使用者动作的干扰最小化。
发明内容
根据各种实施例,提供了一种腕垫。所述腕垫可以包括基底结构。所述腕垫可以进一步包括从所述基底结构延伸的至少两个柔性支撑件。所述腕垫可以进一步包括振动总成,所述振动总成支撑于所述至少两个柔性支撑件上,使得所述振动总成可以通过所述至少两个柔性支撑件与所述基底结构间隔开。所述腕垫可以进一步包括垫子总成,所述垫子总成包括垫子,所述垫子设置于所述振动总成上方,以将所述振动总成隐藏于所述基底结构与所述垫子之间。所述垫子可以紧固至所述基底结构。所述至少两个柔性支撑件可以被配置成使所述基底结构与所述振动总成的振动运动相隔离。所述振动总成的所述振动运动可以致使所述振动总成的朝向所述垫子总成的表面相对于所述垫子总成的朝向所述振动总成的对应表面移动,以允许经由垫子总成的所述垫子感知到到所述振动总成的所述振动运动。
根据各种实施例,提供一种腕垫。所述腕垫可以包括基底结构。所述腕垫可以进一步包括从所述基底结构延伸的至少两个柔性支撑件。所述腕垫可以进一步包括振动总成,所述振动总成包括振动部件及致动器。所述振动部件可以支撑于所述至少两个柔性支撑件上,使得所述振动部件可以通过所述至少两个柔性支撑件与所述基底结构间隔开。所述致动器可以耦接于所述振动部件下方且在所述至少两个柔性支撑件之间,以从所述振动部件悬挂。所述腕垫可以进一步包括垫子总成,所述垫子总成包括垫子,所述垫子设置于所述振动总成上方,以将所述振动总成隐藏于所述基底结构与所述垫子之间。所述垫子可以紧固至所述基底结构。所述腕垫可以进一步包括在所述振动总成的所述振动部件与所述垫子总成的所述垫子之间的润滑层。所述至少两个柔性支撑件可以被配置成使所述基底结构与所述振动总成的所述振动运动相隔离。所述振动总成的所述振动部件的所述振动运动可以致使所述振动总成的所述振动部件的朝向所述垫子总成的表面相对于所述垫子总成的所述垫子的朝向所述振动总成的对应表面移动。所述润滑层可以被配置成最小化所述振动总成的所述振动部件的振动损失,并促进所述振动总成的所述振动部件与所述垫子总成的所述垫子之间的相对移动。
根据各种实施例,提供一种腕垫。所述腕垫可以包括基底结构。所述腕垫可以进一步包括从所述基底结构延伸的至少两个柔性支撑件。所述腕垫可以进一步包括振动总成,所述振动总成包括振动部件及致动器。所述振动部件可以支撑于所述至少两个柔性支撑件上,使得所述振动部件可以通过所述至少两个柔性支撑件与所述基底结构间隔开。所述致动器可以耦接于所述振动部件下方且在所述至少两个柔性支撑件之间,以从所述振动部件悬挂。所述腕垫可以进一步包括垫子总成,所述垫子总成包括垫子,所述垫子设置于所述振动总成上方,以将所述振动总成隐藏于所述基底结构与所述垫子之间。所述垫子可以紧固至所述基底结构。所述腕垫可以进一步包括润滑板,所述润滑板固定地附接至所述垫子总成的所述垫子的朝向所述振动板的一侧。所述振动总成的所述振动部件的振动运动可以致使所述振动总成的所述振动部件的朝向所述垫子总成的表面相对于所述润滑板的朝向所述振动总成的对应表面移动。所述至少两个柔性支撑件可以被配置成使所述基底结构与所述振动总成的所述振动运动相隔离。所述润滑板可以与所述振动总成的所述振动部件接触,以最小化所述振动总成的所述振动部件的振动损失,并促进所述振动总成的所述振动部件与所述垫子总成的所述垫子之间的相对移动。
附图说明
在附图中,贯穿不同的视图,相似的附图标记通常是指代相同的部件。附图不一定按比例绘制,而是通常将重点放在说明本发明的原理上。在以下描述中,将参考以下附图描述各种实施例,其中:
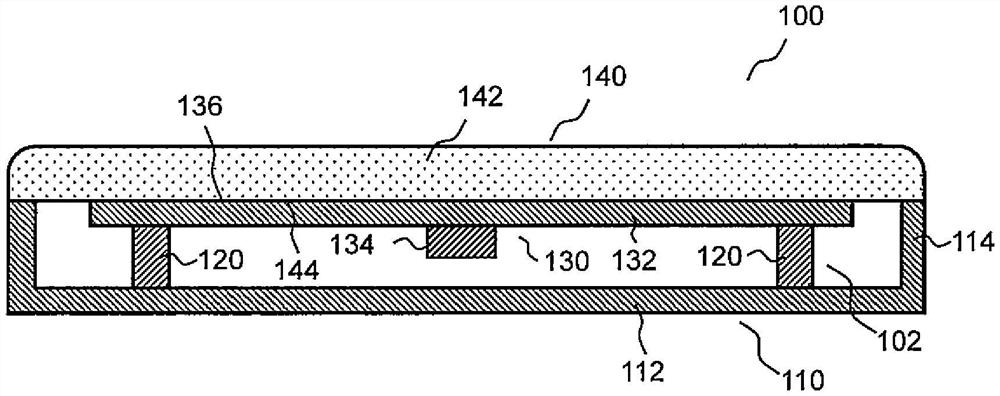
图1示出根据各种实施例的腕垫的前视截面图的示意图;
图2A示出根据各种实施例的腕垫的前视截面图的示意图;
图2B示出根据各种实施例的图2A的腕垫的移除基底结构后的仰视图;
图3示出根据各种实施例的腕垫的前视截面图的示意图;
图4示出根据各种实施例的腕垫的前视截面图的示意图;
图5示出根据各种实施例的腕垫的前视截面图的示意图,其中与图4的腕垫的振动总成的振动部件的表面(或顶表面)上的凸块或圆形凸出物有关的特征和/或限制与图3的腕垫相组合;
图6示出根据各种实施例的腕垫的前视截面图的示意图;
图7示出根据各种实施例腕垫的前视截面图的示意图,其中与图6的腕垫的振动总成的振动部件的表面(或顶表面)上的一个或多个润滑衬垫有关的特征和/或限制与图3的腕垫相组合;
图8示出根据各种实施例的腕垫的前视截面图的示意图;
图9A示出根据各种实施例的腕垫的前视截面图的示意图;
图9B示出根据各种实施例的图9A的腕垫的柔性支撑件的前视图;
图9C示出根据各种实施例的图9A的腕垫900的柔性支撑件的前视截面图;
图9D示出根据各种实施例的图9A的腕垫的振动总成的振动部件的立体图;
图10A示出根据各种实施例的在腕垫中点处的侧视截面图;
图10B示出根据各种实施例的在图10A的腕垫的端部处的侧视截面图;并且
图11示出根据各种实施例的在腕垫中点处的侧视截面图。
具体实施方式
以下在设备的上下文中描述的实施例对于相应的方法是类似有效的,反之也然。此外,应理解,以下描述的实施例可以组合,例如,一个实施例的一部分可以与另一个实施例的一部分组合。
应理解,在以下描述中使用时,术语“在…上”、“在…上方”、“顶部”、“底部”、“向下”、“侧”、“后方”、“左”、“右”、“前”、“侧向”、“侧”、“上”、“下”等是为了方便起见并用于帮助理解相对位置或方向,而并非要限制任何装置、结构或任何装置或结构的任何部分的定向。另外,除非上下文另外明确指出,否则单数术语“一”、“一个”及“该”包括复数形式。类似地,除非上下文另外明确指出,否则词语“或”旨在包括“和”。
各种实施例大致涉及腕垫。该腕垫可以被配置成响应于来自处理器的信号而产生触觉反馈。处理器可以是运行应用程序并将信号直接发送至腕垫的主计算机。该处理器还可以是腕垫中的本地控制器,该本地控制器从运行应用程序的主计算机接收触觉反馈指令。根据各种实施例,腕垫可以被配置成对使用例如键盘、鼠标、游戏手柄、操纵杆等输入设备的使用者的手腕提供舒适感及支撑。根据各种实施例,腕垫也可称为腕垫子、腕衬垫、腕护垫或腕支撑件。
在各种实施例中,腕垫中的触觉反馈可以以精密且精细的方式产生。根据各种实施例,当产生触觉反馈时,腕垫的外壳(或壳体、外部结构或基底结构)可以相对于置放腕垫的表面保持静止。根据各种实施例,当产生触觉反馈时,腕垫的垫子(或护垫)也可不相对于腕垫的外壳主动地(或直接地)移动。相反,根据各种实施例,振动以这样的方式在腕垫的内部产生,使得该振动可以作为触觉反馈的形式经由腕垫的垫子而感知到。因此,触觉感觉可以以优雅及精细的方式传递给使用者,而不会引起使用者过多的不适和/或不会干扰使用者对输入设备的使用。
图1示出根据各种实施例的腕垫100的前视截面图的示意图。如图所示,根据各种实施例,腕垫100可以包括基底结构110。根据各种实施例,基底结构110可以是腕垫100的底部外壳、底部壳体或底部外部结构。根据各种实施例,基底结构110可以包括底板部分112。根据各种实施例,基底结构110可以包括一个或多个侧壁114,所述侧壁在基底结构110的底板部分112的一个或多个对应边缘处从基底结构110的底板部分112向上延伸。根据各种实施例,基底结构110可以是细长形状。因此,基底结构110的底板部分112可以是细长的板状形状。另外,根据各种实施例,基底结构110可以包括至少两个侧壁114,每一侧壁从基底结构110的细长底板部分112的对应端边缘向上延伸。
如图所示,根据各种实施例,腕垫100可以进一步包括从基底结构110延伸的至少两个柔性支撑件120。根据各种实施例,至少两个柔性支撑件120中的每一者可以以成圆柱状或柱状的方式从基底结构110的底板部分112至少大体竖直或向上地延伸。因此,至少两个柔性支撑件120中的每一者可以至少大体垂直于基底结构110的底板部分112。根据各种实施例,至少两个柔性支撑件120可以在基底结构110的底板部分112的相应端边缘处的至少两个侧壁114内从基底结构110的底板部分112延伸。根据各种实施例,至少两个柔性支撑件120可以由柔性材料制成,例如橡胶、弹性体或致密发泡材料等,从而可以弯曲和/或易曲折。根据各种实施例,至少两个柔性支撑件可以是弹簧。根据各种实施例,至少两个柔性支撑件120可以包括两个、三个、四个或更多个柔性支撑件120。
如图所示,根据各种实施例,腕垫100可以包括振动总成130,该振动总成130以这样的方式支撑于至少两个柔性支撑件120上,使得振动总成130可以通过至少两个柔性支撑件120与基底结构110隔开。因此,至少两个柔性支撑件120可以用作振动总成130与基底结构110之间的间隔件,以将振动总成130保持或悬挂于距离基底结构110一定距离处(且在基底结构110上方)。根据各种实施例,至少两个柔性支撑件120可以在振动总成130与基底结构110之间。因此,至少两个柔性支撑件中的每一者的一端可以耦接至基底结构110,且至少两个柔性支撑件中的每一者的另一端可以耦接至振动总成130。因此,振动总成130可以不与基底结构110直接接触。
根据各种实施例,振动总成130可以包括振动部件132及致动器134。根据各种实施例,振动总成130的振动部件132可以由至少两个柔性支撑件120支撑。因此,至少两个柔性支撑件120可以将振动总成的振动部件132保持或悬挂于距离基底结构110一定距离处(且在基底结构110上方),使得振动部件132与基底结构110隔开。根据各种实施例,至少两个柔性支撑件中的每一者的一端可以耦接至基底结构110,且至少两个柔性支撑件中的每一者的另一端可以耦接至振动总成130的振动部件132。根据各种实施例,振动总成130的致动器134可以耦接于振动总成130的振动部件132下方且在至少两个柔性支撑件120之间,以从振动总成130的振动部件132悬挂。因此,振动总成130的致动器134可以附接至振动总成130的振动部件132的底表面133,使得振动总成130的致动器134可以从振动总成130的振动部件132悬挂。另外,振动总成130的致动器134可以位于至少两个柔性支撑件120之间。根据各种实施例,振动总成130可以包括耦接至振动部件132的一个或多个致动器134。另外,一个或多个致动器134可以位于至少两个柔性支撑件120之间。根据各种实施例,振动总成130的致动器134可以在至少两个柔性支撑件120之间的振动总成130的振动部件132的长度的中点处。根据各种实施例,振动部件132可以是细长形的振动板。
如图所示,根据各种实施例,腕垫100可以包括垫子总成140,垫子总成140包括垫子142,垫子142以这样的方式设置于振动总成130上方,以将振动总成130隐藏于基底结构110与垫子142之间,其中垫子总成140的垫子142可以紧固至基底结构110。因此,垫子总成140的垫子142可以附接至基底结构110,且可以以这样的方式覆盖基底结构110,以包围腕垫100的内部空间102。因此,振动总成130可以包含在由垫子总成140的垫子142及基底结构110界定的腕垫100的内部空间102内,使得振动总成140可以包围在腕垫100内。根据各种实施例,垫子可以由海绵、发泡体或聚酯制成。根据各种实施例,振动总成130的振动部件132可以松散地邻接垫子总成140。因此,振动总成130的振动部件132可以紧邻垫子总成140,使得振动总成130的振动部件132可以与垫子总成140接触或者可以触碰垫子总成140。振动总成130的振动部件132可以不扣紧、附接、固定或接合至垫子总成140。举例而言,振动总成130的振动部件132可以以这样的方式松散地邻接垫子总成140的垫子142,使得振动总成130的振动部件132可以接触或可以触碰垫子总成140的垫子142,而无需彼此扣紧、附接、固定或接合。
根据各种实施例,振动总成130可以设定成进入振动运动。根据各种实施例,振动总成130的振动运动可以是振动总成130的振动部件132的振动运动。因此,振动总成130的致动器134可以被配置成可操作以使振动总成130的振动部件132振动,以便响应于从处理器接收到的信号将振动总成130的振动部件132设定成进入振动运动,以在腕垫100中产生触觉反馈。因此,当腕垫100需要触觉反馈时,振动总成130的振动部件132可以由致动器134设定成进入振动运动。根据各种实施例,处理器可以是运行应用程序并将信号直接发送至振动总成130的致动器134以产生触觉反馈的主计算机。根据各种实施例,处理器还可以是腕垫100中的本地处理器,其从运行应用程序的主计算机接收触觉反馈指令,进而将信号发送至振动总成130的致动器134以产生触觉反馈。根据各种实施例,处理器可以理解为任何类型的逻辑实现实体,其可以是专用电路或执行储存于内存、固件或其任何组合中的软件的处理器。因此,处理器可以是硬接线逻辑电路或可以是可编程逻辑电路,例如可编程处理器(例如可编程逻辑控制器(Programmable Logic Controller;PLC)),例如微处理器(例如复杂指令集计算机(Complex Instruction Set Computer;CISC)处理器或精简指令集计算机(Reduced Instruction Set Computer;RISC)处理器)。处理器还可以是执行软件的处理器,例如任何类型的计算机程序,例如使用虚拟机代码(例如Java)的计算机程序。根据各种实施例,处理器可以集成或封装于腕垫100中,或者可以是连接至腕垫100的独立装置。
根据各种实施例,至少两个柔性支撑件120可以被配置成使基底结构110与振动总成130的振动运动相隔离。根据各种实施例,至少两个柔性支撑件120可以使基底结构110与振动总成130的振动部件132的振动运动相隔离。因此,由柔性材料制成的至少两个柔性支撑件120可以用于吸收和/或衰减振动,从而防止振动从振动总成130的振动部件132传送至基底结构110,以使基底结构110与振动总成130的振动部件132的振动运动相隔离。根据各种实施例,当振动总成130的振动部件132的振动运动在相对于基底结构110的x-y平面中时,至少两个柔性支撑件120可以在一定程度上相应地弯曲、挠曲、摇摆、扭转或偏转,以吸收或衰减x-y平面中的振动运动。根据各种实施例,当振动总成130的振动部件132的振动运动在相对于基底结构110的z方向上时,至少两个柔性支撑件120可以在一定程度上相应地伸展、压缩、屈曲、挠曲、扭转、扭曲或变形,以吸收或衰减z方向上的振动运动。
根据各种实施例,至少两个柔性支撑件120还可以被配置成以这样的方式提供沿相应轴向方向的偏置力,使得当使用者的手腕搁置于腕垫100上时,至少两个柔性支撑件120可以朝着使用者的手腕推动或挤压,使得振动总成130的振动部件132的振动运动不会受到来自使用者的手腕的压力的影响或被前述压力减弱,且可以以触觉反馈的形式让使用者的手腕感知到。
根据各种实施例,振动总成130的振动运动可以致使振动总成130的朝向垫子总成140的表面(或振动总成130的最顶表面)相对于垫子总成140的朝向振动总成130的对应表面(或垫子总成140的最底表面)移动,以使得允许经由垫子总成140的垫子142感知到振动总成130的振动运动。根据各种实施例,振动总成130的朝向垫子总成140的表面(或振动总成130的最顶表面)可以是振动总成130的振动部件132的面向垫子总成140的表面136(或顶表面)。因此,振动总成130的振动部件132的表面136及垫子总成140的对应表面(或垫子总成140的最底表面)可以彼此相对且面向彼此。根据各种实施例,振动总成130的振动部件132的表面136可以松散地邻接垫子总成140的对应表面。因此,振动总成130的振动部件132的表面136可以紧邻垫子总成140的对应表面,使得振动总成130的振动部件132的表面136可以接触或触碰垫子总成140的对应表面。另外,振动总成130的振动部件132的表面136可以不扣紧、附接、固定或接合至垫子总成140的对应表面。因此,当振动总成130被设定成进入振动运动时,振动总成130的振动部件132的表面136可以相对于垫子总成140的对应表面移动,使得使用者搁置于腕垫100上的手腕可以感知到紧靠在垫子总成140的垫子142下方的振动总成130的振动部件132的振动运动。因此,可以由振动总成130产生间接触觉反馈,该间接触觉反馈可以经由腕垫100的垫子总成140被感知到。
根据各种实施例,垫子总成140的对应表面(或垫子总成140的最底表面)可以是垫子总成140的垫子142的朝向振动总成130的对应表面144(或底表面)。因此,振动总成130的振动部件132的表面136(或顶表面)可以以这样的方式松散地邻接垫子总成140的垫子142的对应表面144(或底表面),使得振动总成130的振动部件132的表面136可以接触或触碰垫子总成140的垫子142的对应表面144,而无需彼此扣紧、附接、固定或接合。因此,振动总成130的振动部件132的振动运动可以致使振动总成130的振动部件132的表面136相对于垫子总成140的垫子142的对应表面144移动,使得使用者搁置于腕垫100上的手腕可以经由与振动总成130的振动部件132接触的垫子总成140的垫子142感知到振动总成130的振动部件132的振动运动。因此,使用者可以经由垫子总成140的垫子142间接地感知到由振动总成130的振动部件132的振动运动产生的触觉反馈。
图2A示出根据各种实施例的腕垫200的前视截面图的示意图。图2B示出根据各种实施例的图2A的腕垫200移除了基底结构后的仰视图。根据各种实施例,图2A及图2B的腕垫200可以包括图1的腕垫100的所有特征。因此,适用于图1的腕垫100的所有特征、改变、修改及变型也可适用于图2A及图2B的腕垫200。根据各种实施例,图2A及图2B的腕垫200可以不同于图1的腕垫100,因为图2A的腕垫200可以包括以下额外特征和/或限制。
如图2A及图2B所示,根据各种实施例,垫子总成140的垫子142可以包括凹陷部分246。根据各种实施例,垫子142的凹陷部分246可以是垫子142的切口部分,其形成垫子142中的凹痕或沟槽。根据各种实施例,凹陷部分246可以在垫子总成140的垫子142的朝向振动总成130的对应表面144上。
根据各种实施例,垫子总成140的垫子142可以设置于振动总成130的振动部件132上方,其中振动部件132布置于垫子总成140的垫子142的凹陷部分246内。因此,当垫子总成的垫子142置放于振动总成130上方并紧固至基底结构110时,振动总成130的振动部件132(或振动总成130的振动部件132的至少一部分)可以配合至垫子总成140的垫子142的凹陷部分246中。因此,垫子总成140的垫子142可以环绕振动总成130的振动部件132的外围。
根据各种实施例,垫子总成140的垫子142的凹陷部分246可以大于振动总成130的振动部件132。根据各种实施例,垫子总成140的垫子142的凹陷部分246的平面区域可以大于振动总成130的振动部件132的对应平面区域,使得在振动部件132的外围与垫子总成140的垫子142的凹陷部分246的周界壁247之间的环状间隙248环绕振动总成130的振动部件132。因此,环状间隙248可以为振动总成130的振动部件132提供空间,以使振动部件132沿振动总成130的振动部件132的对应平面区域在所有方向上相对于垫子总成140的垫子142移动。
根据各种实施例,流体或凝胶可以填充于垫子142的凹陷部分246与振动总成130的振动部件132之间。因此,可以将流体或凝胶填充于垫子142的凹陷部分246与振动总成130的振动部件132之间的环状间隙248中。根据各种其他实施例,垫子142的凹陷部分246与振动总成130的振动部件132之间的环状间隙248可以是没有任何填料的气隙。环状间隙允许振动部件132在水平方向上移动。
图3示出根据各种实施例的腕垫300的前视截面图的示意图。根据各种实施例,图3的腕垫300可以包括图1的腕垫100的所有特征。因此,适用于图1的腕垫100的所有特征、改变、修改及变型也可适用于图3的腕垫300。根据各种实施例,图3的腕垫300可以不同于图1的腕垫100,因为图3的腕垫300可以包括以下额外特征和/或限制。应理解,尽管下文中参照图1的腕垫100描述了图3的腕垫300的额外特征和/或限制,但是根据各种实施例,图3的腕垫300的额外特征和/或限制也可与图2A及图2B的腕垫200组合。
如图3所示,根据各种实施例,图3的腕垫300可以包括振动总成130的振动部件132与垫子总成140的垫子142之间的润滑层350。根据各种实施例,润滑层350可以被配置成最小化振动总成130的振动部件132的振动损失,并促进振动总成130的振动部件132与垫子总成140的垫子142之间的相对移动。因此,润滑层350可以减少振动总成130的振动部件132与垫子总成140的垫子142之间的摩擦。
如图3所示,根据各种实施例,润滑层350可以是垫子总成140的润滑板352的形式,该润滑板以这样的方式固定地附接至垫子总成140的垫子142的朝向振动总成130的振动部件132的一侧,以相对于且面向振动总成130的振动部件132,使得润滑板352可以与振动总成130的振动部件132直接接触。根据各种实施例,润滑板352可以附接至垫子总成140的垫子142的对应表面144(或底表面),使得润滑板352可以朝向振动总成130的振动部件132。因此,润滑板352可以夹在振动总成130的振动部件132的表面136(或顶表面)与垫子总成140的垫子142的对应表面144(或底表面)之间。
根据各种实施例,由于润滑板352固定地附接至垫子总成140的垫子142,因此润滑板352可以视为是垫子总成140的一部分。因此,垫子总成140的对应表面(或垫子总成140的最底表面),其中振动总成130的振动部件132的表面136(或顶表面)可以松散地邻接润滑板352的对应表面354(或底表面)。因此,振动总成130的振动部件132的表面136(或顶表面)可以以这样的方式松散地邻接垫子总成140的润滑板352的对应表面354(或底表面),使得振动总成130的振动部件132的表面136可以接触或触碰润滑板352的对应表面354,而无需彼此扣紧、附接、固定或接合。因此,振动总成130的振动部件132的振动运动可以致使振动总成130的振动部件132的表面136相对于润滑板352的对应表面354移动,使得凭借垫子总成140的润滑板352与振动总成130的振动部件132接触,使用者搁置于腕垫300上的手腕可以经由垫子总成140的垫子142感知到振动总成130的振动部件132的振动运动。
根据各种实施例,润滑板352可以经由黏合剂或胶水固定地附接至垫子总成140的垫子142。因此,润滑板352可以经由黏合剂或胶水黏附到垫子总成140的垫子142的对应表面144(或底表面)。
图4示出根据各种实施例的腕垫400的前视截面图的示意图。根据各种实施例,图4的腕垫400可以包括图1的腕垫100的所有特征。因此,适用于图1的腕垫100的所有特征、改变、修改及变型也可适用于图4的腕垫400。根据各种实施例,图4的腕垫400可以不同于图1的腕垫100,不同之处在于图4的腕垫400可以包括以下额外特征和/或限制。应理解,尽管在下文中参照图1的腕垫100描述了图4的腕垫400的额外特征和/或限制,但是根据各种实施例,图4的腕垫400的额外特征和/或限制也可以任何组合方式与图2A及图2B的腕垫200和/或图3的腕垫300组合。
如图4所示,根据各种实施例,图4的腕垫400可以包括振动总成130的振动部件132与垫子总成140的垫子142之间的润滑层450。根据各种实施例,润滑层450可以被配置成最小化振动总成130的振动部件132的振动损失,并促进振动总成130的振动部件132与垫子总成140的垫子142之间的相对移动。因此,润滑层450可以减少振动总成130的振动部件132与垫子总成140的垫子142之间的摩擦。
如图4所示,根据各种实施例,润滑层450可以是从振动总成130的振动部件132的表面136(或顶表面)朝向垫子总成140突出的凸块或圆形凸出物454的形式。根据各种实施例,凸块或圆形凸出物454可以与振动总成130的振动部件132一体模制或一体形成,使得振动部件132与凸块或圆形凸出物454一起整体地形成单个一件式单元。根据各种实施例,凸块或圆形凸出物454可以沿振动总成130的振动部件132的长度以规则间隔排列。
根据各种实施例,振动总成130的表面(或振动总成130的最顶表面)及垫子总成140的对应表面(或垫子总成130的最底表面)可以彼此相对且面向彼此。在图4中,根据各种实施例,振动总成130的振动部件132的表面136(或顶表面)上的凸块或圆形凸出物454可以松散地邻接垫子总成140的对应表面。因此,振动总成130的振动部件132的表面136上的凸块或圆形凸出物454可以紧邻垫子总成140的对应表面,使得振动总成130的振动部件132的表面136上的凸块或圆形凸出物454可以接触或触碰垫子总成140的对应表面。另外,振动总成130的振动部件132的表面136上的凸块或圆形凸出物454可以不扣紧、附接、固定或接合至垫子总成140的对应表面。因此,当振动总成130被设定成进入振动运动时,振动总成130的振动部件132的表面136上的凸块或圆形凸出物454可以相对于垫子总成140的对应表面移动,使得使用者搁置于腕垫100上的手腕可以感知到紧靠在垫子总成140的垫子142下方的振动总成130的振动部件132的振动运动。
根据各种实施例,垫子总成140的对应表面(或垫子总成140的最底表面)可以是垫子总成140的垫子142的朝向振动总成130的对应表面144(或底表面)。因此,振动总成130的振动部件132的表面136(或顶表面)上的凸块或圆形凸出物454可以以这样的方式松散地邻接垫子总成140的垫子142的对应表面144(或底表面),使得振动总成130的振动部件132的表面136上的凸块或圆形凸出物454可以接触或触碰垫子总成140的垫子142的对应表面144,而无需彼此扣紧、附接、固定或接合。因此,振动总成130的振动部件132的振动运动可以致使振动总成130的振动部件132的表面136上的凸块或圆形凸出物454相对于垫子总成140的垫子142的对应表面144移动,使得使用者搁置于腕垫100上的手腕可以经由与振动总成130的振动部件132接触的垫子总成140的垫子142感知到振动总成130的振动部件132的振动运动。
根据各种实施例,振动总成130的振动部件132的表面136(或顶表面)上的凸块或圆形凸出物454可以最小化与垫子总成140的垫子142的对应表面144(或底表面)的接触,从而最小化摩擦,以最小化振动总成130的振动部件132的振动损失,并促进振动总成130的振动部件132与垫子总成140的垫子142之间的相对移动。
作为说明与图4的腕垫400的振动总成130的振动部件132的表面136(或顶表面)上的凸块或圆形凸出物454有关的特征和/或限制可以与其他实施例组合的示例,图5示出根据各种实施例的腕垫500的前视截面图的示意图,其中与图4的腕垫400的振动总成130的振动部件132的表面136(或顶表面)上的凸块或圆形凸出物454有关的特征和/或限制与图3的腕垫300组合。如图5所示,根据各种实施例,振动总成130的振动部件132的表面136(或顶表面)上的凸块或圆形凸出物454可以松散地邻接的垫子总成140的对应表面(或垫子总成140的最底表面)可以是垫子总成140的润滑板352的对应表面354(或底表面)。因此,振动总成130的振动部件132的表面136(或顶表面)上的凸块或圆形凸出物454可以以这样的方式松散地邻接垫子总成140的润滑板352的对应表面354(或底表面),使得振动总成130的振动部件132的表面136上的凸块或圆形凸出物454可以接触或触碰润滑板352的对应表面354,而无需彼此扣紧、附接、固定或接合。因此,振动总成130的振动部件132的振动运动可以致使振动总成130的振动部件132的表面136上的凸块或圆形凸出物454相对于润滑板352的对应表面354移动,使得凭借垫子总成140的润滑板352与振动总成130的振动部件132上的凸块或圆形凸出物454接触,使用者搁置于腕垫300上的手腕可以经由垫子总成140的垫子142感知到振动总成130的振动部件132的振动运动。
根据各种实施例,图5的腕垫500的润滑层550可以包括振动总成130的振动部件132的表面136(或顶表面)上的凸块或圆形凸出物454及垫子总成140的润滑板352。根据各种实施例,振动总成130的振动部件132的表面136(或顶表面)上的凸块或圆形凸出物454可以最小化与垫子总成140的润滑板352的对应表面354(或底表面)的接触,从而最小化摩擦,以最小化振动总成130的振动部件132的振动损失,并促进振动总成130的振动部件132与垫子总成140的垫子142之间的相对移动。
图6示出根据各种实施例的腕垫600的前视截面图的示意图。根据各种实施例,图6的腕垫600可以包括图1的腕垫100的所有特征。因此,适用于图1的腕垫100的所有特征、改变、修改及变型也可适用于图6的腕垫600。根据各种实施例,图6的腕垫600可以不同于图1的腕垫100,因为图6的腕垫600可以包括以下额外特征和/或限制。应理解,尽管在下文中参考图1的腕垫100描述了图6的腕垫600的额外特征和/或限制,但是根据各种实施例,图6的腕垫600的额外特征和/或限制也可以任何组合方式与图2A及图2B的腕垫200和/或图3的腕垫300组合。
如图6所示,根据各种实施例,图6的腕垫600可以包括振动总成130的振动部件132与垫子总成140的垫子142之间的润滑层650。根据各种实施例,润滑层650可以被配置成最小化振动总成130的振动部件132的振动损失,并促进振动总成130的振动部件132与垫子总成140的垫子142之间的相对移动。因此,润滑层650可以减少振动总成130的振动部件132与垫子总成140的垫子142之间的摩擦。
如图6所示,根据各种实施例,润滑层650可以是一个或多个润滑衬垫656的形式,该润滑衬垫656由自润滑材料制成,附接至振动总成130的振动部件132的朝向垫子总成140的表面136(或顶表面)。根据各种实施例,一个或多个润滑衬垫656可以经由胶水或黏合剂附接至振动总成130的振动部件132。根据各种实施例,一个或多个润滑衬垫656可以沿振动总成130的振动部件132的长度以规则间隔排列。根据各种实施例,一个或多个润滑衬垫656可以具有各种形状及尺寸。根据各种实施例,一个或多个润滑衬垫656可以是一细长条的形式。根据各种实施例,一个或多个润滑衬垫656可以包括沿振动总成130的振动部件132的长度以规则间隔分布的两个或两个以上的衬垫。
根据各种实施例,振动总成130的表面(或振动总成130的最顶表面)与垫子总成140的对应表面(或垫子总成130的最底表面)可以彼此相对且面向彼此。在图6中,根据各种实施例,振动总成130的振动部件132的表面136(或顶表面)上的一个或多个润滑衬垫656可以松散地邻接垫子总成140的对应表面。因此,振动总成130的振动部件132的表面136上的一个或多个润滑衬垫656可以紧邻垫子总成140的对应表面,使得振动总成130的振动部件132的表面136上的一个或多个润滑衬垫656可以接触或触碰垫子总成140的对应表面。另外,振动总成130的振动部件132的表面136上的一个或多个润滑衬垫656可以不扣紧、附接、固定或接合至垫子总成140的对应表面。因此,当振动总成130被设定成进入振动运动时,振动总成130的振动部件132的表面136上的一个或多个润滑衬垫656可以相对于垫子总成140的对应表面移动,使得使用者搁置于腕垫100上的手腕可以感知到紧靠在垫子总成140的垫子142下方的振动总成130的振动部件132的振动运动。
根据各种实施例,垫子总成140的对应表面(或垫子总成140的最底表面)可以是垫子总成140的垫子142的朝向振动总成130的对应表面144(或底表面)。因此,振动总成130的振动部件132的表面136(或顶表面)上的一个或多个润滑衬垫656可以以这样的方式松散地邻接垫子总成140的垫子142的对应表面144(或底表面),使得振动总成130的振动部件132的表面136上的一个或多个润滑衬垫656可以接触或触碰垫子总成140的垫子142的对应表面144,而无需彼此扣紧、附接、固定或接合。因此,振动总成130的振动部件132的振动运动可以致使振动总成130的振动部件132的表面136上的一个或多个润滑衬垫656相对于垫子总成140的垫子142的对应表面144移动,使得使用者搁置于腕垫100上的手腕可以经由与振动总成130的振动部件132接触的垫子总成140的垫子142感知到振动总成130的振动部件132的振动运动。
根据各种实施例,振动总成130的振动部件132的表面136(或顶表面)上的一个或多个润滑衬垫656可以是自润滑的,以使其可以减少与垫子总成140的垫子142的对应表面144(或底表面)的摩擦,从而最小化振动总成130的振动部件132的振动损失,并促进振动总成130的振动部件132与垫子总成140的垫子142之间的相对移动。
作为说明与图6的腕垫600的振动总成130的振动部件132的表面136(或顶表面)上的一个或多个润滑衬垫656有关的特征和/或限制可以与其他实施例组合的示例,图7示出根据各种实施例的腕垫700的前视截面图的示意图,其中与图6的腕垫600的振动总成130的振动部件132的表面136(或顶表面)上的一个或多个润滑衬垫656有关的特征和/或限制与图3的腕垫300组合。如图7所示,根据各种实施例,振动总成130的振动部件132的表面136(或顶表面)上的一个或多个润滑衬垫656可以松散地邻接的垫子总成140的对应表面(或垫子总成140的最底表面)可以是垫子总成140的润滑板352的对应表面354(或底表面)。因此,振动总成130的振动部件132的表面136(或顶表面)上的一个或多个润滑衬垫656可以以这样的方式松散地邻接垫子总成140的润滑板352的对应表面354(或底表面),使得振动总成130的振动部件132的表面136上的一个或多个润滑衬垫656可以接触或触碰润滑板352的对应表面354,而无需彼此扣紧、附接、固定或接合。因此,振动总成130的振动部件132的振动运动可以致使振动总成130的振动部件132的表面136上的一个或多个润滑衬垫656相对于润滑板352的对应表面354移动,使得凭借垫子总成140的润滑板352与振动总成130的振动部件132上的一个或多个润滑衬垫656接触,使用者搁置于腕垫300上的手腕可以经由垫子总成140的垫子142感知到振动总成130的振动部件132的振动运动。
根据各种实施例,图7的腕垫700的润滑层750可以包括振动总成130的振动部件132的表面136(或顶表面)上的一个或多个润滑衬垫656及垫子总成140的润滑板352。根据各种实施例,振动总成130的振动部件132的表面136(或顶表面)上的一个或多个润滑衬垫656为自润滑,使得其可以减少与垫子总成140的润滑板352的对应表面354(或底表面)的摩擦,从而最小化振动总成130的振动部件132的振动损失,并促进振动总成130的振动部件132与垫子总成140的垫子142之间的相对移动。
图8示出根据各种实施例的腕垫800的前视截面图的示意图。根据各种实施例,图8的腕垫800可以包括图1的腕垫100的所有特征。因此,适用于图1的腕垫100的所有特征、改变、修改及变型也可适用于图8的腕垫800。根据各种实施例,图8的腕垫800可以不同于图1的腕垫100,因为图8的腕垫800可以包括以下额外特征和/或限制。应理解,尽管在下文中参照图1的腕垫100描述了图8的腕垫800的额外特征和/或限制,但是根据各种实施例,图8的腕垫800的额外特征和/或限制也可以任何组合方式与图2A及图2B的腕垫200和/或图3的腕垫300和/或图4的腕垫400和/或图5的腕垫500和/或图6的腕垫600和/或图7的腕垫700组合。
如图8所示,根据各种实施例,腕垫800可以进一步包括传感器860,传感器860被配置成检测身体是否在腕垫800的预定邻近区域内,以便在检测到身体时将振动总成130从休眠模式切换至作业模式,以便准备产生振动运动。根据各种实施例,传感器860可以用作“存在传感器”,以感测使用者是否正在使用腕垫800。因此,若使用者没有在使用腕垫800,则腕垫800的触觉反馈功能可以保持关闭,使得当腕垫800无人看管时,不会产生振动总成130的振动运动。因此,可以仅在传感器860检测到使用者时才打开腕垫800的触觉反馈功能。
根据各种实施例,传感器860可以电耦接至振动总成130的致动器134。因此,传感器860可以在检测到使用者时向振动总成130的致动器134发送信号,以将振动总成130的致动器134从休眠模式切换至作业模式。根据各种实施例,传感器860可以电耦接至电力调节电路(未示出),该电力调节电路控制对振动总成130的致动器134的电力供应。电力调节电路可以被配置成仅在传感器860向电力调节电路发送检测到用户的信号时向振动总成130的致动器134供应电力,且当未接收到该信号时切断电力供应。根据各种实施例,传感器860也可电耦接至与振动总成130的致动器134进行电通信的处理器。因此,传感器860可以向处理器发送指示是否检测到用户的信号,使得处理器可以确定是否向振动总成130的致动器134发送信号以产生触觉反馈。
根据各种实施例,传感器860可以包括接近式传感器和/或接触式传感器。根据各种实施例,接近式传感器可以是非接触式传感器,其被配置成检测对象的存在。根据各种实施例,接近式传感器可以包括电容传感器、光学传感器、红外传感器、激光传感器、光传感器、超声传感器、霍尔效应传感器等。根据各种实施例,接触式传感器可以包括压力传感器、触碰传感器、力传感器、应变传感器、压电传感器、开关等。
根据各种实施例,取决于传感器860的类型,传感器860可以相对于腕垫800适当地设置。根据各种实施例,传感器860可以嵌入垫子总成140的垫子142中,传感器860可以设置于垫子总成140及振动总成130之间,传感器860可以设置于振动总成130的振动部件132下方,传感器860可以设置于基底结构110上,传感器860可以设置于腕垫800的内部空间102中,或者传感器860可以设置于腕垫800的外部。
举例而言,在图8中,示出了传感器860可以是接近式传感器,其可以设置于振动总成130的振动部件132的下方。应理解,图8仅作为示例提供,且各种实施例不限于所示的示例。
图9A示出根据各种实施例的腕垫900的前视截面图的示意图。根据各种实施例,图9A的腕垫900可以包括图1的腕垫100的所有特征。因此,适用于图1的腕垫100的所有特征、改变、修改及变型也可适用于图9A的腕垫900。根据各种实施例,图9A的腕垫900可以不同于图1的腕垫100,因为图9A的腕垫900可以包括以下额外功能和/或限制。应理解,尽管下文中参照图1的腕垫100来描述图9A的腕垫900的额外特征和/或限制,但是根据各种实施例,图9A的腕垫900的额外特征和/或限制也可以任何组合方式与图2A及图2B的腕垫200和/或图3的腕垫300和/或图4的腕垫400和/或图5的腕垫500和/或图6的腕垫600和/或图7的腕垫700和/或图8的腕垫800组合。
图9B示出根据各种实施例的图9A的腕垫900的柔性支撑件120的前视图。图9C示出根据各种实施例的图9A的腕垫900的柔性支撑件120的前视截面图。如图所示,根据各种实施例,柔性支撑件120可以包括中空柱状结构922。柔性支撑件120的中空柱状结构922可以包括底部凸缘924、顶部凸缘926及沿中空柱状结构922的在底部凸缘924与顶部凸缘926之间的周向突起928。根据各种实施例,柔性支撑件120的中空柱状结构922的侧壁可以具有均匀厚度,使得内通道921的轮廓可以至少大体是直的,其中在柔性支撑件120的中空柱状结构922的周向突起928的区域处具有变宽的周向空腔927。根据各种实施例,柔性支撑件120的总体形状及配置,特别是柔性支撑件120的周向突起928,可以促进柔性支撑件120弯曲和/或曲折,使得柔性支撑件120可以相应地弯曲、挠曲、摇摆、扭转或偏转,以吸收或衰减相对于振动总成130的振动部件132的x-y平面中的振动运动,且柔性支撑件120还可以相应地伸展、压缩、屈曲、挠曲、扭转、扭曲或变形,从而吸收或衰减相对于振动总成130的振动部件132的在z方向上的振动运动。
根据各种实施例,柔性支撑件120的顶部凸缘926及周向突起928可以被配置成夹持振动总成130的振动部件132的对应部分。因此,柔性支撑件120可以配合至振动总成130的振动部件132,其中柔性支撑件120的顶部凸缘926在振动部件132的一侧,并且周向突起928在振动部件132的另一侧。因此,柔性支撑件120的在柔性支撑件120的顶部凸缘926与周向突起928之间的颈部925可以延伸通过振动总成130的振动部件132的对应部分,使得顶部凸缘926可以在振动部件132的对应部分的一侧,且周向突起928可以在振动部件132的对应部分的另一侧。
根据各种实施例,底部凸缘924可以被配置成固定至基底结构110。根据各种实施例,底部凸缘924可以经由黏合剂或胶水固定至基底结构110。
图9D示出根据各种实施例的图9A的手腕900的振动总成130的振动部件132的立体图。如图所示,振动总成130的振动部件132可以在振动部件132的每一端131、133处包括叉状元件938。根据各种实施例,每一叉状元件938可以包括两个尖头939。根据各种实施例,叉状元件938的在两个尖头939之间的根部937可以具有对应于柔性支撑件120的颈部925的一半横截面轮廓的形状,使得柔性支撑件120的颈部925可以在叉状元件938的两个尖头939之间滑动,以坐落在叉状元件938的根部937中,其中柔性支撑件120的顶部凸缘926在叉状元件938的一侧,且柔性支撑件120的周向突起928在叉状元件938的另一侧。根据各种实施例,柔性支撑件120的颈部925的横截面轮廓可以是圆形的,叉状元件938的根部937可以是半圆形的。
根据各种实施例,振动总成130的振动部件132可以在每一端包括至少一个叉状元件938。根据各种实施例,振动总成130的振动部件132可以在每一端包括两个叉状元件938。因此,振动总成130的振动部件132可以包括四个叉状元件938。因此,图9A的腕垫900可以包括四个柔性支撑件120,其将振动总成130的振动部件132支撑于基底结构110上方。应理解,根据各种实施例的振动总成130的振动部件132可以包括至少两个叉状元件938,由此在振动总成130的振动部件132的每一端存在至少一个叉状元件938。因此,振动总成130的振动部件132可以包括两个或两个以上叉状元件938,其中在振动总成130的振动部件132的每一端具有至少一个叉状元件938。
图10A示出根据各种实施例的在腕垫1000的中点处的侧视截面图。图10B示出根据各种实施例的在腕垫1000的端部处的侧视截面图。根据各种实施例,图10A及图10B的腕垫1000可以包括图1的腕垫100的所有特征以及图2A及图2B的腕垫200和/或图4的腕垫400和/或图7的腕垫700和/或图8的腕垫800和/或图9A至图9D的腕垫900的额外特征和/或限制的组合。因此,适用于图1的腕垫100和/或图2A及图2B的腕垫200和/或图4的腕垫400和/或图7的腕垫700和/或图8的腕垫800和/或图9A至图9D的腕垫900的所有特征、改变、修改及变型也可适用于图10A及图10B的腕垫1000。
如图10A及图10B所示,根据各种实施例,类似于图1的腕垫100,图10A及图10B的腕垫1000可以包括基底结构110。根据各种实施例,类似于图1的腕垫100,图10A及图10B的腕垫1000可以包括至少两个柔性支撑件120。根据各种实施例,图10A及图10B的腕垫1000可以包括四个柔性支撑件120。根据各种实施例,类似于图1的腕垫100,图10A及图10B的腕垫1000可以包括具有振动部件132及致动器134的振动总成130。根据各种实施例,类似于图1的腕垫100,图10A及图10B的腕垫1000可以包括具有垫子142的垫子总成140。根据各种实施例,类似于图2A及图2B的腕垫200,图10A及图10B的腕垫1000可以包括:垫子总成140的垫子142可以包括凹陷部分246。根据各种实施例,类似于图9A至图9D的腕垫900,图10A及图10B的腕垫1000可以包括:至少两个柔性支撑件120中的每一者包括中空柱状结构922,该中空柱状结构922具有底部凸缘924、顶部凸缘926及沿中空柱状结构922在底部凸缘924与顶部凸缘926之间的周向突起928。根据各种实施例,类似于图9A至图9D的腕垫900,图10A及图10B的腕垫1000可以包括:振动总成130的振动部件132可以包括叉状元件938,每一叉状元件938具有两个尖头939。
根据各种实施例,类似于图4的腕垫400,图10A及图10B的腕垫1000可以包括振动总成130的具有凸块或圆形凸出物454(图10A或图10B中未图示)的振动部件132。根据各种实施例,类似于图6的腕垫600,图10A及图10B的腕垫1000可以包括振动总成130的具有由自润滑材料制成的一个或多个润滑衬垫656(图10A或图10B中未图示)的振动部件132。根据各种实施例,类似于图8的腕垫800,图10A及图10B的腕垫1000可以包括传感器860(图10A或图10B中未图示)。
如图10A及图10B所示,根据各种实施例,腕垫1000的垫子总成140可以进一步包括垫子座1041及垫子包覆件1043。根据各种实施例,垫子总成140的垫子142可以置放于垫子座1041上,其中垫子包覆件1043以这样的方式包覆于垫子142上方且固定至垫子座1041,以将垫子142捆束至垫子座1041。根据各种实施例,垫子座1041可以附接至基底结构110。因此,垫子总成140的垫子142可以经由垫子座1041紧固至基底结构110。另外,在垫子包覆件1043覆盖垫子142且垫子包覆件1043固定至垫子座1041的情况下,垫子包覆件1043可以使垫子142的形状平滑。根据各种实施例,垫子包覆件1043可以是皮革包覆件。根据各种实施例,垫子座1041可以包括被配置成附接至基底结构110的附接元件1045。根据各种实施例,垫子座1041可以包括至少两个插入元件1049,每一插入元件被配置成松散地插入至柔性支撑件120的内通道921中。
图11示出根据各种实施例的在腕垫1100的中点处的侧视截面图。根据各种实施例,图11的腕垫1100可以包括图10A及图10B的腕垫1000的所有特征。因此,适用于图10A及图10B的腕垫1000的所有特征、改变、修改及变型也可适用于图11A及图11B的腕垫1100。根据各种实施例,类似于图3的腕垫300,图11的腕垫1100还可以包括:垫子总成140可以包括润滑板352。
图12示出根据各种实施例的腕垫的振动部件132的变体的立体图。如图所示,振动部件132可以在振动部件132的每一端131、133处包括叉状元件938。根据各种实施例,每一叉状元件938可以包括两个尖头939。根据各种实施例,每一叉状元件938可以包括两个尖头939之间的根部937。根据各种实施例,振动部件132可以包括从振动部件132的表面136(或顶表面)突出的凸块或圆形凸出物454。根据各种实施例,图12的振动部件132可以并入图1的腕垫100、图2A的腕垫200、图3的腕垫300、图4的腕垫400、图5的腕垫500、图8的腕垫800、图9A的腕垫900、图10A及图10B的腕垫1000,及图11的腕垫1100中。
以下示例涉及各种实施例。
示例1是一种腕垫,包括:
基底结构;
至少两个柔性支撑件,其从基底结构延伸;
振动总成,其以这样的方式支撑于至少两个柔性支撑件上,使得振动总成通过至少两个柔性支撑件与基底结构间隔开;
垫子总成,其包括垫子,所述垫子以这样的方式设置于振动总成上方,以将振动总成隐藏于基底结构与垫子之间,其中垫子紧固至基底结构,
其中至少两个柔性支撑件被配置成将基底结构与振动总成的振动运动相隔离;且
其中振动总成的振动运动致使振动总成的朝向垫子总成的表面以这样的方式相对于垫子总成的朝向振动总成的对应表面移动,以允许经由垫子总成的垫子感知到振动总成的振动运动。
在示例2中,示例1的主题可以可选地包括:振动总成可以包括振动部件及致动器。振动部件可以由至少两个柔性支撑件支撑,且致动器可以耦接于振动部件下方并且在至少两个柔性支撑件之间,以从振动部件悬挂。
在示例3中,示例2的主题可以可选地包括:振动部件包括振动板。
在示例4中,示例1至3中任何一者的主题可以可选地包括:至少两个柔性支撑件由橡胶制成。
在示例5中,示例1至4中任何一者的主题可以可选地包括:至少两个柔性支撑件中的每一者包括中空柱状结构,该中空柱状结构具有底部凸缘、顶部凸缘及沿中空柱状结构在底部凸缘与顶部凸缘之间的周向突起。
在示例6中,示例5的主题(包括示例2的主题)可以可选地包括:顶部凸缘及周向突起可以被配置成夹持振动部件的对应部分,且其中底部凸缘可以被配置成固定至基底结构。
在示例7中,示例1至6中任何一者的主题(包括示例2的主题)可以可选地包括:垫子总成的垫子可以包括凹陷部分,其中垫子可以设置于振动总成的振动部件上方,且振动部件布置于凹陷部分内,其中垫子的凹陷部分可以大于振动总成的振动部件。
在示例8中,任何示例7的主题可以可选地包括:流体或凝胶可以填充于垫子的凹陷部分与振动总成的振动部件之间。
在示例9中,上述示例中的任何一者的主题(包括示例2的主题)可以选择性地包括:垫子总成可以包括润滑板,所述润滑板以这样的方式固定地附接至垫子总成的垫子的朝向振动总成的振动部件的一侧,以与振动总成的振动部件相对且面向振动总成的振动部件,使得润滑板可以与振动总成的振动部件直接接触。
在示例10中,上述示例中的任何一者的主题(包括示例2的主题)可以可选地包括:振动总成的振动部件的朝向垫子总成的表面可以包括从其突出的凸块或圆形凸出物。
在示例11中,上述示例中的任何一者的主题(包括示例2的主题)可以可选地包括:振动总成的振动部件的朝向垫子总成的表面可以包括附接至其上的一个或多个润滑衬垫,其中一个或多个润滑衬垫由自润滑材料制成。
在示例12中,示例1至11中任何一者的主题可以可选地包括:该垫子总成可以进一步包括垫子座及垫子包覆件,其中该垫子可以置放于该垫子座上,该垫子包覆件包覆于该垫子上方并以这样的方式固定至该垫子座以将该垫子捆束至该垫子座,且其中垫子座可以附接至基底结构。
在示例13中,示例1至12中的任何一者的主题可以可选地包括传感器,其被配置成检测身体是否在腕垫的预定邻近区域内,以便在检测到身体时将振动总成从休眠模式切换至作业模式,以便准备产生振动运动。
示例14是一种腕垫,包括:
基底结构;
至少两个柔性支撑件,其从基底结构延伸;
振动总成,其包括振动部件及致动器,其中振动部件以这样的方式支撑于至少两个柔性支撑件上,使得振动部件通过至少两个柔性支撑件与基底结构间隔开,且其中致动器耦接于振动部件下方且在两个柔性支撑件之间,以从振动部件悬挂;
垫子总成,其包括垫子,所述垫子以这样的方式设置于振动总成上方,以将振动总成隐藏于基底结构与垫子之间,其中垫子紧固至基底结构;及
在振动总成的振动部件与垫子总成的垫子之间的润滑层,
其中至少两个柔性支撑件被配置成将基底结构与振动总成的振动运动相隔离,
其中振动总成的振动部件的振动运动致使振动总成的振动部件的朝向垫子总成的表面相对于垫子总成的垫子的朝向振动总成的对应表面移动,且
其中润滑层被配置成最小化振动总成的振动部件的振动损失,并促进振动总成的振动部件与该垫子总成的垫子之间的相对移动。
在示例15中,示例14的主题可以可选地包括:振动部件包括振动板。
在示例16中,示例14或15的主题可以可选地包括:至少两个柔性支撑件由橡胶制成。
在示例17中,示例14至16中任何一者的主题可以可选地包括:至少两个柔性支撑件中的每一者可以包括中空柱状结构,该中空柱状结构具有底部凸缘、顶部凸缘及沿中空柱状结构在底部凸缘与顶部凸缘之间的周向突起。
在示例18中,示例17的主题可以可选地包括:顶部凸缘及周向突起可以被配置成夹持振动部件的对应部分,且其中底部凸缘可以被配置成固定至基底结构。
在示例19中,示例14至18中任何一者的主题可以可选地包括:润滑层包括润滑板,该润滑板以这样的方式固定地附接至该垫子总成的垫子的对应表面,以与振动总成的振动部件的表面相对且面向振动总成的振动部件的表面,使得润滑板与振动总成的振动部件直接接触。
在示例20中,示例14至19中的任何一者的主题可以可选地包括:润滑层可以包括沿振动总成的振动部件的表面的凸块或圆形凸出物。
在示例21中,示例14至19中任何一者的主题可以可选地包括:润滑层可以包括由自润滑材料制成的一个或多个润滑衬垫,其附接至振动总成的振动部件的表面。
在示例22中,示例14至21中的任何一者的主题可以可选地包括垫子座及垫子包覆件,其中垫子可以置放于垫子座上,垫子包覆件包覆于垫子上方且以这样的方式固定至垫子座以将垫子捆束至垫子座,其中该垫子座可以附接至该基底结构。
在示例23中,示例14至22中的任何一者的主题可以可选地包括传感器,其可以被配置成检测身体是否在腕垫的预定邻近区域内,以便在检测到身体时将振动总成从休眠模式切换至作业模式,以准备产生振动运动。
示例24是一种腕垫,包括:
基底结构;
至少两个柔性支撑件,其从基底结构延伸;
振动总成,其包括振动部件及致动器,其中振动部件以这样的方式支撑于至少两个柔性支撑件上,使得振动部件通过至少两个柔性支撑件与基底结构间隔开,且其中致动器耦接于振动部件下方且在至少两个柔性支撑件之间,以从振动部件悬挂;
垫子总成,其包括垫子,所述垫子以这样的方式设置于该振动总成上方,以将该振动总成隐藏于该基底结构与该垫子之间,其中该垫子紧固至该基底结构;及
润滑板,其固定地附接至垫子总成的垫子的朝向振动板的一侧,
其中振动总成的振动部件的振动运动致使振动总成的振动部件的朝向垫子总成的表面相对于润滑板的朝向振动总成的对应表面移动,
其中至少两个柔性支撑件被配置成将基底结构与振动总成的振动运动相隔离,且
其中润滑板与振动总成的振动部件接触,以最小化振动总成的振动部件的振动损失,并促进振动总成的振动部件与垫子总成的垫子之间的相对移动。
在示例25中,示例24的主题可以可选地包括:至少两个柔性支撑件由橡胶制成。
在示例26中,示例24或25中的主题可以可选地包括:至少两个柔性支撑件中的每一者包括中空柱状结构,所述中空柱状结构具有底部凸缘、顶部凸缘及沿中空柱状结构在底部凸缘与顶部凸缘之间的周向突起。
在示例27中,示例26的主题可以可选地包括:顶部凸缘及周向突起可以被配置成夹持振动总成的对应部分,且其中底部凸缘可以被配置成固定至基底结构。
在示例28中,示例24至27中任何一者的主题可以可选地包括:振动总成的振动部件的朝向垫子总成的垫子的表面可以包括凸块、或圆形凸出物、或由自润滑材料制成的一个或多个润滑衬垫。
在示例29中,示例24至28中的任何一者的主题可以可选地包括:垫子总成可以进一步包括垫子座及垫子包覆件,其中该垫子可以置放于垫子座上,该垫子包覆件包覆于该垫子上方并以这样的方式固定至该垫子座以将该垫子捆束至该垫子座,且其中该垫子座可以附接至该基底结构。
在示例30中,示例24至29中的任何一者的主题可以可选地包括传感器,其可以被配置成检测身体是否在腕垫的预定邻近区域内,以便在检测到身体时将振动总成从休眠模式切换至作业模式,以准备产生振动运动。
各种实施例提供了一种腕垫,该腕垫可以以精密且精细的方式产生触觉反馈。各种实施例提供了一种腕垫,该腕垫可以以优雅及精细的方式将触觉传递给使用者,而不会引起使用者过多的不适和/或不会干扰使用者对输入设备的使用。
尽管已经参照具体实施例特定地示出及描述了本发明,但本领域技术人员应当理解,在不脱离由所附权利要求限定的本发明的范围的情况下,可以在形式及细节上进行各种改变、修改、变化。本发明的范围因此由所附权利要求指示,且因此旨在涵盖在权利要求的等同含义及范围内的所有改变。
- 手腕支架和手腕支架垫
- 一种设有护腕垫文件包式鼠标垫