X射线摄影装置和摄影位置校正方法
文献发布时间:2024-01-17 01:24:51
技术领域
本发明涉及一种X射线摄影装置和摄影位置校正方法。
背景技术
以往,已知一种X射线摄影装置。这种装置例如在日本特开2014-117368号公报中被公开。
在上述日本特开2014-117368号公报中公开了一种X射线摄影装置,其具备:X射线源,其照射X射线;X射线检测器,其检测X射线;以及显示装置,其显示将光学运动图像和引导图像进行合成而得到的合成运动图像。关于该X射线摄影装置,操作者一边观察控制室侧的显示装置中显示的合成运动图像,一边指示患者变更摄影位置。另外,患者一边观察摄影室侧的显示装置中显示的合成运动图像,一边变更自身的摄影位置。
在此,整形外科领域的X射线图像的摄影即使对于经验丰富的放射线技师而言也为难易程度高的摄影。例如,在为了诊断分离性骨软骨炎和变形性膝关节病等膝关节周边的疾病而拍摄膝关节侧面的X射线图像的情况下,需要调整摄影位置来对股骨的内侧髁(股骨膝侧的正中线侧的部分)的外缘与外侧髁(股骨膝侧的与正中线侧相反一侧的部分)的外缘发生了重叠的X射线图像进行摄影,以准确地进行疾病的诊断。然而,由于骨头的形状以及腿上的肉的附着方式存在个人差异,因此即使是经验丰富的放射线技师,根据被检体的外观调整摄影位置并以股骨的内侧髁的外缘与外侧髁的外缘重叠的方式进行X射线图像的摄影也是非常困难的。因此,为了拍摄股骨的内侧髁的外缘与外侧髁的外缘重叠那样的能够准确地进行诊断的X射线图像,需要在拍摄X射线图像之后基于拍摄到的X射线图像进行摄影位置的校正。而且,为了拍摄能够准确地进行诊断的X射线图像,需要反复进行X射线图像的摄影和摄影位置的校正。因而,会导致被检体的辐射量和摄影时间增加。因此,期望在抑制辐射量和摄影时间的增加的同时获取能够准确地进行诊断的X射线图像。
发明内容
本发明是为了解决如上所述的问题而完成的,本发明的一个目的在于提供一种能够在抑制辐射量和摄影时间的增加的同时获取能够准确地进行诊断的X射线图像的X射线摄影装置和摄影位置校正方法。
本发明的第一方面的X射线摄影装置具备:X射线照射部,其对被检体照射X射线;X射线检测部,其检测从X射线照射部照射并透过了被检体的X射线;以及校正信息获取部,其确定基于X射线检测部的检测信号拍摄到的X射线图像中的、被检体的一个摄影对象物的多个规定部分各自的外缘,并基于所确定的多个规定部分的外缘之间的位置关系来获取用于校正X射线照射部相对于被检体的摄影对象物的相对位置的位置校正信息,其中,位置校正信息包含用于将X射线照射部相对于被检体的摄影对象物的相对位置校正为能够拍摄到多个规定部分的外缘之间的位置关系以规定的位置关系映现的X射线图像的位置的相对移动方向和相对移动量。
本发明的第二方面的摄影位置校正方法包括以下步骤:照射步骤,从X射线照射部对被检体照射X射线;检测步骤,检测透过了被检体的X射线;以及校正信息获取步骤,确定基于检测步骤中的X射线的检测而拍摄到的X射线图像中的、被检体的一个摄影对象物的多个规定部分各自的外缘,并基于所确定的多个规定部分的外缘之间的位置关系来获取用于校正X射线照射部相对于被检体的摄影对象物的相对位置的位置校正信息,其中,位置校正信息包含用于将X射线照射部相对于被检体的摄影对象物的相对位置校正为能够拍摄到多个规定部分的外缘之间的位置关系以规定的位置关系映现的X射线图像的位置的相对移动方向和相对移动量。
在本发明的第一方面的X射线摄影装置和第二方面的摄影位置校正方法中,确定X射线图像中的、被检体的一个摄影对象物的多个规定部分各自的外缘,并基于所确定的多个规定部分的外缘之间的位置关系来获取用于校正X射线照射部相对于被检体的摄影对象物的相对位置的位置校正信息。而且,位置校正信息包含用于将X射线照射部相对于被检体的摄影对象物的相对位置校正为能够拍摄到多个规定部分的外缘之间的位置关系以规定的位置关系映现的X射线图像的位置的相对移动方向和相对移动量。由此,获取包含用于将X射线照射部相对于骨头或人工关节等被检体的摄影对象物的相对位置校正为能够拍摄到多个规定部分的外缘之间的位置关系以规定的位置关系映现的X射线图像的位置的相对移动方向和相对移动量的位置校正信息,因此通过使用获取到的位置校正信息通知校正所需的相对移动方向和相对移动量,放射线技师等用户能够基于通知结果高精度地进行摄影位置的校正。其结果,能够减少反复进行X射线图像的摄影和摄影位置的校正的次数。由此,能够提供一种能够在抑制辐射量和摄影时间的增加的同时获取能够准确地进行诊断的X射线图像的X射线摄影装置和摄影位置校正方法。另外,通过使用获取到的位置校正信息进行用于变更X射线照射部的相对位置的控制,能够将X射线照射部相对于骨头或人工关节等被检体的摄影对象物的相对位置高精度地校正为能够拍摄到多个规定部分的外缘之间的位置关系以适于诊断的规定的位置关系映现的X射线图像的位置。其结果,能够减少反复进行X射线图像的摄影和摄影位置的校正的次数。由此,能够提供一种能够在抑制辐射量和摄影时间的增加的同时获取能够准确地进行诊断的X射线图像的X射线摄影装置和摄影位置校正方法。
附图说明
图1是示出本发明的第一实施方式的X射线摄影装置的整体结构的示意图。
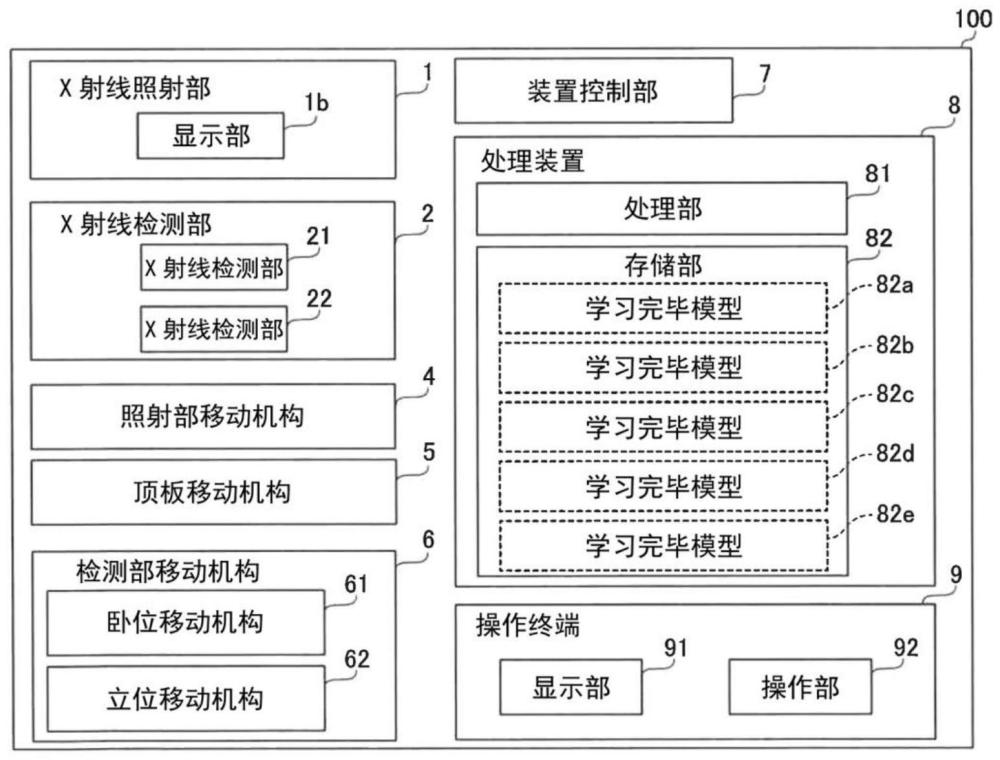
图2是示出本发明的第一实施方式的X射线摄影装置的结构的框图。
图3是示出拍摄膝关节侧面时的被检体的躺卧姿势的一例的图。
图4是示出从后侧看到的右膝的关节周边的骨头的构造的图。
图5是拍摄膝关节侧面而得到的正式拍摄图像的一例。
图6是拍摄膝关节侧面而得到的预拍摄图像的一例。
图7是示出由处理部使用学习完毕模型计算偏移量的一例的图。
图8是X射线管球位置x的函数f(x)的图表。
图9是示出膝关节周边的骨头的图。
图10是示出由操作终端的显示部进行的显示的一例的图。
图11是用于说明本发明的第一实施方式的X射线摄影装置的摄影位置的校正的第一图。
图12是用于说明本发明的第一实施方式的X射线摄影装置的摄影位置的校正的第二图。
图13是示出拍摄肱骨时的位置校正信息的获取方法的一例的图。
图14是示出位置校正前和位置校正后的肘关节周边的X射线图像的图。
图15是示出第一实施方式的X射线摄影装置的自动校正模式下的摄影位置校正的处理流程的图。
图16是示出第一实施方式的X射线摄影装置的手动校正模式下的摄影位置校正的处理流程的图。
图17是用于说明肩胛骨的摄影方向的图。
图18是示出本发明的X射线摄影装置的另一例的图。
图19是示出由图18所示的X射线摄影装置的操作终端的显示部进行的显示的一例的图。
图20是示出第二实施方式的X射线摄影装置的结构的框图。
图21是用于说明从预拍摄图像获取参数信息的图。
图22是示出第二实施方式的X射线摄影装置的摄影位置校正方法的处理流程的图。
图23是示出第三实施方式的X射线摄影装置的结构的框图。
图24是用于说明从外观图像获取参数信息的图。
图25是示出第四实施方式的X射线摄影装置的结构的框图。
图26是用于说明从与预拍摄图像不同的X射线图像获取参数信息的图。
具体实施方式
下面,基于附图来说明将本发明具体化的实施方式。
[第一实施方式]
参照图1~图14对第一实施方式的X射线摄影装置100的结构进行说明。
如图1所示,X射线摄影装置100具备X射线照射部1和检测部2。另外,X射线摄影装置100具备用于载置被检体201的顶板3、照射部移动机构4、顶板移动机构5、检测部移动机构6以及装置控制部7。X射线摄影装置100构成为通过由从顶棚悬垂下来的X射线照射部1照射的X射线进行摄影。此外,照射部移动机构4和顶板移动机构5是本公开的“移动机构”的一例。另外,装置控制部7是本公开的“移动控制部”的一例。
X射线照射部1构成为对被检体201照射X射线。另外,X射线照射部1包括对被检体201照射X射线的X射线源(X射线管球)和调整X射线的照射范围的准直器。另外,X射线照射部1具备把持部1a,该把持部1a是在用户202通过手动使X射线照射部1移动时为了供用户202把持而设置的。另外,X射线照射部1构成为具备显示部1b,并能够通过显示部1b显示用户202把持着把持部1a使X射线照射部1移动时的动力辅助量和摄影条件等。另外,显示部1b构成为还能够显示后述的位置校正信息。显示部1b例如由液晶显示器或有机EL显示器等构成。
检测部2构成为检测从X射线照射部1照射并透过了被检体201的X射线。如图1所示,检测部2包括X射线检测部21和X射线检测部22,其中,该X射线检测部21是为了在使被检体201躺卧在顶板3上的状态(卧位或侧位)下进行摄影而使用的,该X射线检测部22是为了在使被检体201站立的姿势(立位)下进行摄影而使用的。X射线检测部21和22例如是FPD(Flat Panel Detector:平板检测器),用于检测透过了被检体201的X射线。
照射部移动机构4构成为通过使X射线照射部1移动来变更X射线照射部1相对于被检体201的相对位置。在X射线摄影装置100中,X射线照射部1以从顶棚悬垂下来的方式被照射部移动机构4支承。而且,X射线照射部1以能够在摄影室内移动的方式被照射部移动机构4支承。照射部移动机构4与X方向、Y方向及Z方向分别对应地具备未图示的马达和电磁制动器。而且,X射线照射部1构成为能够通过照射部移动机构4沿X方向、Y方向以及Z方向各个方向移动。另外,照射部移动机构4与X方向、Y方向及Z方向分别对应地具备用于控制X射线照射部1的移动的未图示的编码器。另外,照射部移动机构4与X方向、Y方向及Z方向分别对应地具备未图示的电位计,构成为能够检测X射线照射部1在X方向、Y方向以及Z方向各个方向上的位置。
另外,X射线照射部1构成为能够绕Z轴线进行转动。而且,X射线照射部1构成为绕X轴线和Y轴线等与Z轴线垂直的轴线的各个轴线进行转动。在如图1那样的状态下,X射线照射部1能够绕Y轴线进行转动。X射线照射部1构成为能够通过绕与Z轴线垂直的轴线进行转动来变更X射线的照射方向和角度。另外,照射部移动机构4与X射线照射部1能够转动的两个轴线分别对应地具备未图示的马达和电磁制动器。另外,照射部移动机构4与X射线照射部1能够转动的两个轴线分别对应地具备未图示的编码器和未图示的电位计。另外,照射部移动机构4通过X射线照射部1的移动来电性地输出所拉出的线缆的长度,由此能够检测X射线照射部1在上下方向(Z方向)上的绝对位置。
顶板移动机构5构成为:使顶板3移动来变更被检体201相对于X射线照射部1的位置,由此变更X射线照射部1相对于被检体201的相对位置。顶板移动机构5与X方向、Y方向及Z方向分别对应地具备未图示的马达和电磁制动器。而且,顶板3构成为能够通过顶板移动机构5沿X方向、Y方向以及Z方向各个方向移动。
检测部移动机构6包括卧位移动机构61和立位移动机构62。X射线检测部21和22分别被卧位移动机构61和立位移动机构62以能够根据被检体201的摄影部位移动的方式保持。卧位移动机构61是使X射线检测部21移动的机构,构成为能够变更X射线检测部21相对于被检体201的位置。另外,立位移动机构62是使X射线检测部22移动的机构,构成为能够变更X射线检测部22相对于被检体201的位置。
装置控制部7构成为控制X射线摄影装置100整体。具体地说,装置控制部7构成为进行以下控制等:X射线照射的开始和停止等由X射线照射部1进行的X射线照射的控制;X射线照射部1的X射线照射范围的变更的控制;由检测部2(X射线检测部21和22)进行的检测的控制;通过照射部移动机构4使X射线照射部1进行的移动的控制;以及通过顶板移动机构5使顶板3进行的移动的控制。另外,装置控制部7构成为进行通过卧位移动机构61使X射线检测部21移动的控制以及通过立位移动机构62使X射线检测部22移动的控制。
装置控制部7包括CPU(Central Processing Unit:中央处理单元)或FPGA(field-programmable gate array:现场可编程门阵列)等处理器。另外,装置控制部7构成为能够接收照射部移动机构4所具备的编码器和电位计的检测信号。另外,装置控制部7构成为对照射部移动机构4所具备的马达和电磁制动器进行控制。
另外,如图2所示,X射线摄影装置100具备包括处理部81和存储部82的处理装置8。处理装置8例如是由放射线技师等用户202操作的PC(Personal Computer:个人计算机)。另外,处理装置8连接有键盘和鼠标等未图示的输入设备、以及液晶显示器或有机EL显示器等未图示的显示设备。处理装置8与装置控制部7以能够通信的方式进行连接。另外,处理装置8也可以与装置控制部7一体地构成。
处理部81构成为:确定基于检测部2(X射线检测部21和22)的检测信号拍摄到的X射线图像中的、被检体201的一个骨头的多个规定部分各自的外缘,并基于所确定的多个规定部分的外缘之间的位置关系来获取用于校正X射线照射部1相对于被检体201的骨头的相对位置的位置校正信息。处理部81包括CPU、GPU(Graphics Processing Unit:图形处理单元)、ROM(Read Only memory:只读存储器)以及RAM(Random Access Memory:随机存取存储器)等。此外,处理部81是本公开的“校正信息获取部”的一例。另外,骨头是本公开的“摄影对象物”的一例。
而且,位置校正信息包含用于将X射线照射部1相对于被检体201的骨头的相对位置校正为能够拍摄到多个规定部分的外缘之间的位置关系以规定的位置关系映现的X射线图像的位置的相对移动方向和相对移动量。
存储部82包括HDD(Hard Disk Drive:硬盘驱动器)或SSD(Solid State Drive:固态硬盘)等非易失性的存储介质。在存储部82中存储有将拍摄到骨头的X射线图像作为输入数据进行机器学习而得到的学习完毕模型(学习完毕模型82a、82b、82c、82d以及82e)。学习完毕模型82a、82b、82c、82d以及82e例如是使用了U-Net的模型。此外,将X射线图像作为输入数据的机器学习也可以是有监督学习、无监督学习以及强化学习中的任一种学习。在第一实施方式中,存储于存储部82的学习完毕模型是按摄影部位的多个规定部分的每个规定部分而存在的。存储于存储部82的学习完毕模型学习了摄影部位的多个规定部分的各个部分的特征点。学习完毕模型82a和82b是在拍摄被检体201的膝关节时使用的学习完毕模型。而且,学习完毕模型82c、82d以及82e是在拍摄被检体201的肘关节时使用的学习完毕模型。此外,学习完毕模型(学习完毕模型82a、82b、82c、82d以及82e)也可以被存储(保存)在经由网络与X射线摄影装置100连接的服务器中。另外,在存储部82中也可以存储有按每个摄影部位制作出的学习完毕模型。
另外,在第一实施方式中,在拍摄被检体201的膝关节时,处理部81构成为:对学习完毕模型82a和82b输入X射线图像,由此基于所输入的X射线图像来获取多个规定部分的外缘,并基于获取到的多个规定部分的外缘来计算位置校正信息。另外,在第一实施方式中,在拍摄被检体201的肘关节时,处理部81构成为:对学习完毕模型82c、82d以及82e输入X射线图像,由此基于所输入的X射线图像来获取多个规定部分的外缘,并基于获取到的多个规定部分的外缘来计算位置校正信息。
另外,X射线摄影装置100具备操作终端9。操作终端9是用于用户202进行X射线摄影装置100的操作的终端。操作终端9与装置控制部7及处理装置8以能够通信的方式进行连接。用户202能够使用操作终端9进行用于X射线照射部1的位置变更以及X射线图像拍摄的操作。操作终端9具备显示部91和操作部92。显示部91例如由液晶显示器或有机EL显示器等构成。另外,操作部92是用于进行X射线摄影装置100的操作的用户接口。操作部92例如包括开关或遥控器等。另外,操作部92也可以包括设置于显示部91的触摸面板。
X射线摄影装置100构成为进行由处理部81获取到的位置校正信息的通知。在第一实施方式中,X射线摄影装置100构成为通过由操作终端9的显示部91进行的显示来进行位置校正信息的通知。另外,在第一实施方式中,X射线摄影装置100也能够通过由X射线照射部1的显示部1b进行的显示来进行位置校正信息的通知。此外,由显示部91进行的显示的详细情况在后文叙述。
(拍摄膝关节时的校正)
如图3所示,在进行膝盖的摄影时,在被检体201被载置于顶板3的上方的状态下,利用缓冲垫203和204等调整被检体201的躺卧姿势,以使作为观察对象部位的膝盖的位置、大腿和小腿的回旋情况、小腿的抬起情况(膝盖的弯曲角度)等变得适当。然后,以调整后的躺卧姿势的状态对被检体201的观察对象部位进行X射线图像的摄影。
而且,X射线摄影装置100构成为:根据X射线图像来确定(估计)如图4所示的股骨31的多个规定部分,并获取用于校正X射线照射部1相对于被检体201的骨头的相对位置的位置校正信息。
另外,X射线摄影装置100构成为能够拍摄预拍摄图像24(参照图6),该预拍摄图像24是基于放射线量比拍摄正式拍摄图像23(参照图5)时的放射线量少的X射线的照射而生成的X射线图像,该正式拍摄图像23是在校正了X射线照射部1相对于被检体201的骨头的相对位置之后拍摄到的X射线图像。例如,拍摄预拍摄图像24时的放射线量是拍摄正式拍摄图像23时的放射线量的1/50~1/100左右。在第一实施方式中,正式拍摄图像23是用于诊断疾病的图像。此外,正式拍摄图像23是本公开的“位置校正后图像”的一例,预拍摄图像24是本公开的“位置校正前图像”的一例。
另外,在第一实施方式中,X射线摄影装置100的处理部81构成为基于预拍摄图像24中的被检体201的骨头的多个规定部分的外缘之间的位置关系来获取位置校正信息。
在第一实施方式中,X射线摄影装置100构成为:为了拍摄如图5所示那样的股骨31的内侧髁31a(参照图6)的外缘和外侧髁31b(参照图6)的外缘彼此重叠的X射线图像,由处理部81获取位置校正信息并校正X射线照射部1相对于被检体201的骨头的相对位置。此外,内侧髁31a和外侧髁31b是本公开的“多个规定部分”的一例。
处理部81基于X射线图像中的被检体201的一个骨头的多个规定部分的外缘之间的位置关系,来获取X射线图像中的多个规定部分的外缘之间的相对位置偏移。而且,处理部81构成为基于获取到的多个规定部分的外缘之间的相对位置偏移来获取位置校正信息。在第一实施方式中,在拍摄膝关节侧面时,X射线摄影装置100的处理部81构成为基于股骨31的内侧髁31a(股骨31膝侧的正中线侧的部分)的外缘与外侧髁31b(股骨31膝侧的与正中线侧相反一侧的部分)的外缘之间的位置偏移,来获取位置校正信息。
另外,处理部81构成为基于X射线图像中的被检体201的骨头的多个规定部分的外缘之间的重叠情况来获取多个规定部分的外缘之间的相对位置偏移。在第一实施方式中,处理部81如图7所示那样使用学习完毕模型82a和82b获取了被检体201的股骨31的膝侧的多个规定部分的外缘之间的相对位置偏移。具体地说,处理部81通过基于学习完毕模型82a的分割处理,来根据预拍摄图像24确定(估计)内侧髁31a的外缘。另外,处理部81通过基于学习完毕模型82b的分割处理,来根据预拍摄图像24确定(估计)外侧髁31b的外缘。而且,处理部81构成为基于根据预拍摄图像24确定(估计)出的内侧髁31a的外缘和外侧髁31b的外缘来计算股骨31的内侧髁31a的外缘与外侧髁31b的外缘之间的偏移(偏移量和偏移方向)。在由处理部81进行的偏移量和偏移方向的解析中,假设使内侧髁31a和外侧髁31b中的某一方移动,以使内侧髁31a的外缘和外侧髁31b的外缘的后缘一致的方式搜索使得由于移动后的内侧髁31a与外侧髁31b之间的偏移而产生的面积最小的位置,由此确定偏移量和偏移方向。另外,在由处理部81进行的偏移量和偏移方向的解析中,也可以在提取出内侧髁31a和外侧髁31b各自的外缘的图像中确定存在最大偏移幅度的部分。
而且,处理部81构成为:在拍摄被检体201的股骨31的膝侧时,基于计算出的股骨31的内侧髁31a的外缘与外侧髁31b的外缘之间的偏移,来计算用于将X射线照射部1相对于被检体201的骨头的相对位置校正为能够拍摄到多个规定部分的外缘彼此重叠地映现的X射线图像的位置的位置校正信息。具体地说,处理部81基于计算出的股骨31的内侧髁31a的外缘与外侧髁31b的外缘之间的偏移(移动向量),计算X射线照射部1的移动方向和移动量(移动距离)来作为位置校正信息。位置校正信息是利用如图8所示那样股骨31的内侧髁31a的外缘与外侧髁31b的外缘之间的偏移量f相对于X射线管球位置x(X射线照射点)线性地变化的情况而计算出的。在第一实施方式中,基于根据在X射线管球位置x
另外,也可以在确定内侧髁31a和外侧髁31b各自的外缘之前对预拍摄图像24进行预处理。例如,也可以进行通过高通滤波器去除噪声等不需要的信号的处理来作为预处理。另外,作为预处理,也可以进行使拍摄到的膝盖的X射线图像左右反转(将左膝右膝化或者将右膝左膝化)的处理。在该情况下,即使在存储部82中仅存储有与右膝及左膝中的一方对应的学习完毕模型的情况下,处理部81也能够计算右膝和左膝这两方的内侧髁31a的外缘与外侧髁31b的外缘之间的偏移量并且获取位置校正信息。
另外,也可以是,处理部81除了基于内侧髁31a和外侧髁31b的特征以外,还基于被检体201的图9所示的胫骨32、腓骨33、髌骨34以及籽骨35等除股骨31以外的骨头,来确定内侧髁31a和外侧髁31b各自的外缘以及计算内侧髁31a与外侧髁31b的重叠程度(位置关系)。
例如,在膝盖有外旋感(外八字感)的情况下,腓骨33向更后方(从髌骨34分离的方向)移动,从而近端胫腓关节变得更清晰。而且,籽骨35从股骨31的髁部(内侧髁31a和外侧髁31b)分离。另外,在膝盖有内旋感(内八字感)的情况下,腓骨33向更前方(靠近髌骨34的方向)移动,从而与胫骨32的重叠变大。而且,籽骨35靠近股骨31的髁部(内侧髁31a和外侧髁31b)。因而,能够基于腓骨33的位置或籽骨35的位置来判别膝盖是外旋感(外八字感)还是内旋感(内八字感)。
另外,在股骨31所延伸的上下方向上在股骨31的内侧髁31a与股骨31的外侧髁31b之间发生了位置偏移的情况下,在胫骨32的内侧平台32a与胫骨32的外侧平台32b之间发生位置偏移。因而,能够基于胫骨32的内侧平台32a与胫骨32的外侧平台32b的位置关系来判定在股骨31的内侧髁31a与股骨31的外侧髁31b之间是否存在上下方向上的位置偏移。
另外,操作终端9的显示部91显示用于校正为能够拍摄到多个规定部分的外缘之间的位置关系以规定的位置关系映现的X射线图像的位置的、X射线照射部1相对于被检体201的骨头的相对移动方向和相对移动量,来作为位置校正信息的通知。例如,如图10所示那样在操作终端9的显示部91中示出表示X射线照射部1相对于被检体201的骨头的相对移动量和相对移动方向的图表。由此,用户202能够根据显示部91的显示来掌握将X射线照射部1的位置相对于被检体201的骨头向哪个方向进行何种程度的校正。此外,关于由显示部91进行的显示,既可以是如“移动方向:10点钟方向、移动量:3cm”等那样仅通过文字进行的显示,也可以是组合了图像、图以及文字等的显示。
另外,X射线照射部1的显示部1b(参照图1)构成为与显示部91联动地显示。由此,用户202能够在把持着X射线照射部1的把持部1a(参照图1)的状态下通过显示部1b确认进行摄影位置的校正所需的X射线照射部1相对于被检体201的骨头的相对移动方向和相对移动量。
(X射线照射部的移动的控制)
X射线摄影装置100构成为基于位置校正信息来进行用于变更X射线照射部1相对于被检体201的骨头的相对位置的控制。另外,在第一实施方式中,X射线摄影装置100具备自动校正模式和手动校正模式来作为进行摄影位置的校正的模式,其中,在该自动校正模式下,通过装置控制部7的控制来自动地进行摄影位置的校正,在该手动校正模式下,通过用户202的手动操作来进行摄影位置的校正。而且,X射线摄影装置100构成为能够基于由用户202进行的切换操作来使进行摄影位置的校正的模式在自动校正模式与手动校正模式之间切换。
在第一实施方式中,在X射线摄影装置100的自动校正模式下,装置控制部7构成为基于位置校正信息进行自动校正,该自动校正是使X射线照射部1的位置移动来自动地变更X射线照射部1相对于被检体201的骨头的相对位置。另外,X射线摄影装置100构成为在手动校正(手动校正模式)时限制X射线照射部1的移动,该手动校正是通过基于用户202的操作使X射线照射部1移动来进行校正。
具体地说,装置控制部7在自动校正模式下基于由处理部81获取到的位置校正信息进行以下控制:使X射线照射部1自动地移动,以使X射线照射部1相对于被检体201的骨头的相对位置成为能够拍摄到多个规定部分的外缘之间的位置关系以规定的位置关系映现的X射线图像的位置。即,通过装置控制部7的基于位置校正信息进行的控制,照射部移动机构4使X射线照射部1移动到能够拍摄到多个规定部分的外缘之间的位置关系以规定的位置关系映现的X射线图像的位置。
另外,在X射线摄影装置100中,如图11和图12所示,根据从X射线照射部1照射的X射线的扇形波束特性来变更水平方向(XY方向)上的位置,由此能够不改变X射线照射部1的X射线照射角度地进行校正。例如,通过使X射线的照射点(X射线照射部1)从图11的左图的位置移动到图12的左图的位置,能够照射穿过股骨31的内侧髁31a的外缘和股骨31的外侧髁31b的外缘的X射线。由此,即使不改变X射线照射部1的X射线照射角度,也能够拍摄到股骨31的内侧髁31a的外缘和股骨31的外侧髁31b的外缘重叠地映现的状态(参照图12的右图)的X射线图像。此外,也可以在校正摄影位置时,除了变更水平方向(XY方向)上的位置以外,还变更X射线照射部1的X射线照射角度以及X射线照射部1在上下方向(Z方向)上的位置。另外,也可以在校正摄影位置时,除了通过照射部移动机构4使X射线照射部1移动以外,还通过顶板移动机构5使载置有被检体201的顶板3移动。
另外,在基于用户202的操作使X射线照射部1移动时,装置控制部7基于由处理部81获取到的位置校正信息来进行用于限制X射线照射部1的移动的控制。具体地说,装置控制部7构成为:在手动校正模式下,基于位置校正信息来控制由照射部移动机构4的电磁制动器进行的锁定,由此限制X射线照射部1的移动。
这样,在第一实施方式中,装置控制部7构成为基于由处理部81获取到的位置校正信息来进行用于照射部移动机构4变更X射线照射部1相对于被检体201的骨头的相对位置的控制。
(拍摄肘关节时的校正)
另外,在第一实施方式中,处理部81构成为:在拍摄被检体201的肱骨36的肘侧(肘关节)时,也基于X射线图像中的被检体201的骨头的多个规定部分的外缘之间的位置关系来获取多个规定部分的外缘之间的相对位置偏移。在第一实施方式中,处理部81使用学习完毕模型82c、82d以及82e来获取被检体201的肱骨36的肘侧的多个规定部分的外缘之间的相对位置偏移。此外,在拍摄被检体201的肘关节(肱骨36的肘侧)时,也可以使用X射线检测部21和22(参照图1)中的任一个。
在第一实施方式中,处理部81构成为:在拍摄被检体201的肱骨36的肘侧(肘关节)时,计算用于将X射线照射部1相对于被检体201的骨头的相对位置校正为能够拍摄到多个规定部分的外缘同心圆状地映现的X射线图像的位置的位置校正信息。具体地说,处理部81使用学习完毕模型82c、82d以及82e分别确定(估计)肱骨36的部分A、B以及C。然后,处理部81获取所确定的肱骨36的部分A、B以及C之间的相对位置偏移。进而,处理部81基于所得到的肱骨36的部分A、B以及C之间的相对位置偏移,来计算用于将X射线照射部1相对于被检体201的骨头的相对位置校正为能够拍摄到多个规定部分(部分A、B以及C)的外缘同心圆状地映现的X射线图像的位置的位置校正信息。在第一实施方式中,在拍摄肘关节时,处理部81计算用于将X射线管球位置x(X射线照射点)校正为能够拍摄到部分A和部分C的外缘重叠并且多个规定部分(部分A、B以及C)的外缘同心圆状地映现的X射线图像的位置的X射线照射部1的移动方向和移动量(移动距离),来作为位置校正信息。此外,位置校正信息的计算方法使用与上述的拍摄膝关节时的计算方法相同的方法。
具体地说,在如图13的上图所示那样从肱骨36的外侧朝向肱骨小头36a照射X射线来进行X射线图像的摄影的情况下,以肱骨36的肘侧的部分A与部分C的外缘重叠、并且肱骨36的肘侧的多个规定部分(部分A、B以及C)的外缘同心圆状地映现(参照图13的下图)的方式计算用于校正X射线照射部1相对于被检体201的骨头的相对位置的位置校正信息。部分A是肱骨小头36a的凸部。另外,部分B是肱骨36的滑车36b的凹部,部分C是肱骨36的滑车36b的凸部。此外,部分A、B以及C是本公开的“多个规定部分”的一例。此外,也可以基于桡骨37和尺骨38各自的外缘的位置关系中的至少一方以及肱骨36的肘侧的多个规定部分(部分A、B以及C)的位置关系来进行拍摄肘关节时的位置校正信息的计算。图13示出了以下例子:从肱骨36的部分C(滑车36b的凸部)以向上方偏移的方式映现的位置(参照图13的中央图)向部分A(肱骨小头36a的凸部)和部分C(滑车36b的凸部)各自的外缘同心圆状地重叠并且部分B(滑车36b的凹部)的外缘的位置同心圆状地映现在部分A和部分C的外缘的内侧(参照图13的下图)进行校正。基于位置校正信息,使上臂抬起、使载置有上臂的未图示的工作台上升、或者变更X射线照射部1的位置,由此根据从肱骨36的部分C(滑车36b)以向上方偏移的方式映现的位置(参照图13的中央图)起校正X射线照射部1相对于被检体201的骨头的相对位置。
另外,预拍摄图像24的摄影和摄影位置的校正也可以进行多次。例如,也可以如图14所示那样,在基于被检体201的肘关节的预拍摄图像24a进行了摄影位置的校正之后,再次进行预拍摄图像24b的摄影。而且,也可以基于第二次的预拍摄图像24(预拍摄图像24b)再次进行摄影位置的校正,并进行正式拍摄图像23的摄影。在图14所示的例子中,通过进行两次的预拍摄图像24的摄影和两次的位置校正,拍摄到能够在肱骨36与尺骨38之间观察到关节间隙的X射线图像(正式拍摄图像23)。
(位置校正处理)
接着,参照图15对第一实施方式的X射线摄影装置100的使用了自动校正模式的位置校正的处理流程进行说明。
首先,在步骤301中,从X射线照射部1对被检体201照射X射线。在步骤301中,如上所述那样照射放射线量比拍摄正式拍摄图像23时的放射线量少的X射线。此外,步骤301是本公开的“照射步骤”的一例。然后,在步骤301完成后,处理步骤转移到步骤302。
在步骤302中,检测透过了被检体201的X射线。在步骤302中,如上所述那样由检测部2(X射线检测部21或22)检测透过了被检体201的X射线。由此,在步骤302中拍摄预拍摄图像24。此外,步骤302是本公开的“检测步骤”的一例。然后,在步骤302完成后,处理步骤转移到步骤303。
在步骤303中,获取位置校正信息。在步骤303中,如上所述那样确定基于X射线的检测而拍摄到的X射线图像(预拍摄图像24)中的、被检体201的骨头的多个规定部分各自的外缘,并基于所确定的多个规定部分的外缘之间的位置关系来获取用于校正X射线照射部1相对于被检体201的骨头的相对位置的位置校正信息。此外,步骤303是本公开的“校正信息获取步骤”的一例。然后,在步骤303完成后,处理步骤转移到步骤304。此外,既可以自动地进行向步骤304的转移,也可以基于对操作终端9的操作部92进行的操作等由用户202进行的操作来进行向步骤304的转移。另外,在步骤303完成后,在显示部91或显示部1b中也可以显示位置校正信息。
然后,在步骤304中,进行自动位置校正。在步骤304中,基于位置校正信息进行用于变更X射线照射部1相对于被检体201的骨头的相对位置的控制。具体地说,装置控制部7如上所述那样基于位置校正信息来控制照射部移动机构4,从而使X射线照射部1移动。由此,校正X射线照射部1相对于被检体201(被检体201的骨头)的相对位置。然后,使用了X射线摄影装置100的位置校正的处理完成。此外,步骤304是本公开的“位置校正步骤”的一例。
然后,在步骤304完成后,用户202通过进行用于拍摄X射线图像的操作,来进行校正了摄影位置的状态下的X射线图像的摄影。另外,也可以在步骤304完成后自动地进行X射线图像的摄影。
接着,参照图16对第一实施方式的X射线摄影装置100的使用了手动校正模式的位置校正的处理流程进行说明。
首先,在步骤401、402及403中分别进行与自动校正模式下的步骤301、302及303相同的处理。然后,在步骤403完成后,处理步骤转移到步骤404。此外,步骤401是本公开的“照射步骤”的一例,步骤402是本公开的“检测步骤”的一例。另外,步骤403是本公开的“校正信息获取步骤”的一例。
在步骤404中,进行位置校正信息的显示。在步骤404中,如上所述那样由显示部91和显示部1b进行在步骤403中获取到的位置校正信息的显示。然后,在由显示部91和显示部1b显示了位置校正信息之后(步骤404完成后),处理步骤转移到步骤405。此外,步骤404是本公开的“位置校正步骤”的一例。
在步骤405中,进行手动位置校正。在步骤405中,用户202一边确认显示部91或显示部1b的显示一边使X射线照射部1移动,由此进行摄影位置的校正。在步骤405的摄影位置的校正中,既可以通过用户202的把持着X射线照射部1的把持部1a的手使X射线照射部1移动,也可以基于用户202对操作终端9的操作部92进行的操作来通过照射部移动机构4使X射线照射部1移动。
然后,在步骤405完成后,用户202进行用于拍摄X射线图像的操作,由此进行校正了摄影位置的状态下的X射线图像的摄影。
(第一实施方式的效果)
在第一实施方式中,能够得到如下效果。
在第一实施方式中,基于X射线图像中的被检体201的骨头的多个规定部分的外缘之间的位置关系来获取用于校正X射线照射部1相对于被检体201的骨头(摄影对象物)的相对位置的位置校正信息。而且,位置校正信息包含用于将X射线照射部1相对于被检体201的骨头的相对位置校正为能够拍摄到多个规定部分的外缘之间的位置关系以规定的位置关系映现的X射线图像的位置的相对移动方向和相对移动量。由此,获取到包含用于将X射线照射部1相对于被检体201的骨头的相对位置校正为能够拍摄到多个规定部分的外缘之间的位置关系以规定的位置关系映现的X射线图像的位置的相对移动方向和相对移动量的位置校正信息,因此通过使用获取到的位置校正信息显示(通知)校正所需的相对移动方向和相对移动量,放射线技师等用户202能够基于显示(通知)结果高精度地进行摄影位置的校正。其结果,能够减少反复进行X射线图像的摄影和摄影位置的校正的次数。由此,能够提供一种能够在抑制辐射量和摄影时间的增加的同时获取能够准确地进行诊断的X射线图像的X射线摄影装置100和摄影位置校正方法。另外,通过使用获取到的位置校正信息进行用于变更X射线照射部1的相对位置的控制,能够高精度地将X射线照射部1相对于被检体201的骨头的相对位置校正为能够拍摄到多个规定部分的外缘之间的位置关系以适于诊断的规定的位置关系映现的X射线图像的位置。其结果,能够减少反复进行X射线图像的摄影和摄影位置的校正的次数。由此,能够提供一种能够在抑制辐射量和摄影时间的增加的同时获取能够准确地进行诊断的X射线图像的X射线摄影装置100和摄影位置校正方法。
另外,上述第一实施方式的X射线摄影装置100通过如以下那样构成,能够得到如下述那样的进一步效果。
在第一实施方式中,X射线摄影装置100构成为进行由处理部81(校正信息获取部)获取到的位置校正信息的显示(通知)。由此,通过显示(通知)由处理部81获取到的位置校正信息,用户202能够掌握用于将X射线照射部1相对于被检体201的骨头(摄影对象物)的相对位置校正为能够拍摄到多个规定部分的外缘之间的位置关系以规定的位置关系映现的X射线图像的位置的相对移动方向和相对移动量。其结果,用户202能够容易地将X射线照射部1相对于被检体201的骨头的相对位置校正为能够拍摄到多个规定部分的外缘之间的位置关系以规定的位置关系映现的X射线图像的位置。另外,X射线摄影装置100构成为基于位置校正信息进行用于变更X射线照射部1相对于被检体201的骨头的相对位置的控制。由此,由X射线摄影装置100基于位置校正信息进行用于变更X射线照射部1相对于被检体201的骨头的相对位置的控制,因此能够容易地将X射线照射部1相对于被检体201的骨头的相对位置校正为能够拍摄到多个规定部分的外缘之间的位置关系以规定的位置关系映现的X射线图像的位置。
另外,在第一实施方式中,装置控制部7(移动控制部)构成为基于由处理部81(校正信息获取部)获取到的位置校正信息,进行用于照射部移动机构4(移动机构)变更X射线照射部1相对于被检体201的骨头(摄影对象物)的相对位置的控制。由此,由于由装置控制部7基于位置校正信息进行用于照射部移动机构4变更X射线照射部1相对于被检体201的骨头的相对位置的控制,因此与用户202基于位置校正信息通过手动操作进行校正的情况相比,能够更容易地进行摄影位置的校正。
另外,在第一实施方式中,装置控制部7(移动控制部)基于由处理部81(校正信息获取部)获取到的位置校正信息进行以下控制:使X射线照射部1的位置自动地移动,以使X射线照射部1相对于被检体201的骨头(摄影对象物)的相对位置成为能够拍摄到多个规定部分的外缘之间的位置关系以规定的位置关系映现的X射线图像的位置。由此,由于由装置控制部7自动地进行X射线照射部1的位置的校正,因此与通过用户202的手动操作进行X射线照射部1的位置的校正的情况相比,能够更容易地进行X射线照射部1的位置的校正。
另外,在第一实施方式中,在基于用户202的操作使X射线照射部1移动时,装置控制部7(移动控制部)基于由处理部81(校正信息获取部)获取到的位置校正信息来进行用于限制X射线照射部1的移动的控制。由此,即使在通过用户202以手动操作的方式使X射线照射部1移动来进行摄影位置的校正的情况下,也能够由装置控制部7基于位置校正信息限制X射线照射部1的移动。其结果,能够在通过用户202以手动操作的方式使X射线照射部1移动来进行摄影位置的校正的情况下,防止由于用户202的手动操作而使X射线照射部1以超过校正所需的移动量的方式移动以及X射线照射部1向需要校正的移动方向以外的方向移动。
另外,在第一实施方式中,显示部91显示用于校正为能够拍摄到多个规定部分的外缘之间的位置关系以规定的位置关系映现的X射线图像的位置的、X射线照射部1相对于被检体201的骨头(摄影对象物)的相对移动方向和相对移动量,来作为由处理部81(校正信息获取部)获取到的位置校正信息的通知。由此,用户202通过视觉识别显示部91中显示的X射线照射部1相对于被检体201的骨头的相对移动方向和相对移动量,能够容易地掌握需要将摄影位置向哪个方向进行何种程度的校正,从而手动地进行摄影位置的校正。
另外,在第一实施方式中,处理部81(校正信息获取部)构成为:基于X射线图像中的被检体201的一个骨头(摄影对象物)的多个规定部分的外缘之间的位置关系来获取X射线图像中的多个规定部分的外缘之间的相对位置偏移,并基于获取到的多个规定部分的外缘之间的相对位置偏移来获取位置校正信息。由此,由于从X射线图像获取到多个规定部分的外缘之间的相对位置偏移,因此能够基于X射线图像中的多个规定部分的外缘之间的相对位置偏移与使多个规定部分的外缘之间的位置关系成为规定的位置关系的状态下的多个规定部分的外缘之间的相对位置偏移的对比,来获取位置校正信息。
另外,在第一实施方式中,处理部81(校正信息获取部)基于X射线图像中的被检体201的骨头的多个规定部分的外缘之间的重叠情况,来获取多个规定部分的外缘之间的相对位置偏移。然后,在拍摄被检体201的股骨31的膝侧时,处理部81计算用于将X射线照射部1相对于被检体201的相对位置校正为能够拍摄到内侧髁31a的外缘和外侧髁31b的外缘(多个规定部分的外缘之间)重叠地映现的X射线图像的位置的位置校正信息。由此,在拍摄被检体201的股骨31的膝侧(膝关节周边)时,根据位置校正信息将X射线照射部1相对于被检体201的骨头的相对位置校正为能够拍摄到内侧髁31a的外缘和外侧髁31b的外缘(多个规定部分的外缘彼此)重叠地映现的X射线图像的位置。其结果,能够拍摄到能够用于准确地确定分离性骨软骨炎和变形性膝关节病等在膝关节周边发病的疾病的X射线图像。
另外,在第一实施方式中,处理部81(校正信息获取部)基于X射线图像中的被检体201的骨头的多个规定部分的外缘之间的位置关系来获取多个规定部分的外缘之间的相对位置偏移。然后,在拍摄被检体201的肱骨36的肘侧时,处理部81计算用于将X射线照射部1相对于被检体201的骨头的相对位置校正为能够拍摄到肱骨36的多个规定部分(部分A、B以及C)的外缘同心圆状地映现的X射线图像的位置的位置校正信息。由此,在拍摄被检体201的肱骨36的肘侧(肘关节周边)时,根据位置校正信息将X射线照射部1相对于被检体201的骨头的相对位置校正为能够拍摄到肱骨36的多个规定部分(部分A、B以及C)同心圆状地映现的X射线图像的位置。其结果,能够拍摄到能够用于准确地确定分离性骨软骨炎和变形性肘关节病等在肘关节周边发病的疾病的X射线图像。
另外,在第一实施方式中,处理部81(校正信息获取部)构成为:基于预拍摄图像24(位置校正前图像)中的被检体201的骨头的多个规定部分的外缘之间的位置关系来获取位置校正信息,该预拍摄图像24是基于放射线量比拍摄正式拍摄图像23(位置校正后图像)时的放射线量少的X射线的照射而生成的X射线图像,该正式拍摄图像23是在校正了X射线照射部1相对于被检体201的骨头(摄影对象物)的相对位置之后拍摄到的X射线图像。由此,能够减少被检体201在摄影位置校正前的摄影中的辐射量,因此能够进一步抑制直到获取能够准确地进行诊断的X射线图像为止的被检体201的辐射量的增加。
另外,在第一实施方式中,处理部81(校正信息获取部)构成为:对学习完毕模型82a和82b(学习完毕模型82c、82d以及82e)输入X射线图像,由此基于所输入的X射线图像来获取多个规定部分的外缘,并基于获取到的多个规定部分的外缘来计算位置校正信息。由此,通过学习完毕模型82a和82b(学习完毕模型82c、82d以及82e)来获取多个规定部分的外缘,基于获取到的多个规定部分的外缘来计算位置校正信息,因此通过使用学习观察对象的部位的特征点所得到的学习完毕模型,能够高精度地获取多个规定部分的外缘。其结果,能够高精度地计算位置校正信息。
[第二实施方式]
参照图20和图21对第二实施方式进行说明。在该第二实施方式中,由处理部681基于从预拍摄图像24获取到的参数信息设定X射线管球位置x的函数f(x)的倾斜度α,并且计算位置校正信息。此外,在图中,对与上述第一实施方式相同的结构的部分标注相同的附图标记。
(第二实施方式的X射线摄影装置的结构)
如图20所示,X射线摄影装置600具备处理装置608。处理装置608包括处理部681。与第一实施方式的处理装置8同样地,处理装置608例如是由放射线技师等用户202操作的PC。与第一实施方式的处理部81同样地,处理部681包括CPU、GPU以及RAM等。处理部681是本公开的“校正信息获取部”的一例。在第二实施方式中,例如由X射线摄影装置600进行被检体201的膝盖的X射线摄影。
与第一实施方式的处理部81同样地,在拍摄被检体201的股骨31的膝侧时,处理部681根据预拍摄图像24计算股骨31的内侧髁31a的外缘与外侧髁31b的外缘之间的偏移(偏移量和偏移方向)。然后,处理部681基于计算出的股骨31的内侧髁31a的外缘与外侧髁31b的外缘之间的偏移,以在内侧髁31a和外侧髁31b的外缘彼此重叠的摄影位置处进行摄影的方式计算X射线照射部1的移动方向和移动量(移动距离),来作为位置校正信息。此时,与第一实施方式同样地,处理部681基于根据预拍摄图像24计算出的内侧髁31a的外缘与外侧髁31b的外缘之间的偏移量f
[数1]
在此,倾斜度α根据包含SID(Source to image receptor distance)等装置参数和在摄影时与被检体201(患者)相对应地设定的被检体固有参数在内的各种参数而发生变化。具体地说,通过下式(2)来计算出倾斜度α。
[数2]
在此,SID是作为装置参数的X射线管球的纵轴位置,是从检测部2(X射线检测部21和X射线检测部22)的检测面到X射线照射部1的距离。关于SID,既可以根据成为摄影对象的身体部位等而自动地设定推荐的值,也可以从装置控制部7获取实际的值。另外,b表示从检测面到外侧髁31b的高度。D表示被检体201的内侧髁31a与外侧髁31b的实际距离。θ表示将内侧髁31a与外侧髁31b连结的直线相对于从检测面引出的垂线的倾斜度。高度b、距离D以及角度θ是被检体固有参数。高度b和距离D是根据被检体201的体格(骨头的大小)而变化的源自体格的参数。角度θ是根据被检体201的姿势而变化的源自姿势的参数。第二实施方式的处理部681根据预拍摄图像24自动地计算源自体格的参数。即,基于预拍摄图像24自动地计算倾斜度α的值。
在第二实施方式中,处理部681基于同被检体201的骨头(摄影对象物)的内侧髁31a与外侧髁31b(多个规定部分)之间的实际距离对应的参数信息来计算位置校正信息,以计算倾斜度α。处理部681检测被检体201的检测对象部分在被检体201的X射线图像中的大小,来作为参数信息。具体地说,处理部681从为了获取位置校正信息而拍摄到的X射线图像即预拍摄图像24中检测被检体201的检测对象部分的大小,来作为参数信息。然后,处理部681基于所检测出的参数信息来计算高度b和距离D,由此计算位置校正信息。
如图21所示,被检体201的检测对象部分例如是被检体201的股骨31的部分31c、部分31d以及胫骨32的部分32c。在第二实施方式中,大小被检测为参数信息的被检体201的检测对象部分(部分31c、部分31d以及部分32c)是与以规定的位置关系拍摄到的对象即被检体201的摄影对象物中的多个规定部分(内侧髁31a和外侧髁31b)不同的部分。检测对象部分是与规定部分之间在大小或形状上具有相关性的部分。
处理部681例如通过预先存储的学习完毕模型等的算法来进行分割处理,由此从预拍摄图像24中检测被检体201的股骨31的部分31c、部分31d以及胫骨32的部分32c各自的大小(宽度),来作为参数信息。例如,处理部681使用学习完毕模型来检测股骨31和胫骨32各自在预拍摄图像24中的轮廓线。然后,处理部681通过根据所检测出的轮廓线检测部分31c、部分31d以及部分32c的宽度的大小(像素数),来检测被检体201的检测对象部分的大小。部分31c、部分31d以及部分32c在预拍摄图像24中的位置既可以从轮廓的形状或位置坐标等中提取,也可以基于由用户202进行的输入操作来获取。
然后,处理部681例如通过参照预先设定的数据表,来根据作为参数信息而被检测出的部分31c、部分31d以及部分32c的大小计算出用于计算位置校正信息的高度b和距离D的值。在预先设定的数据表中,将被检体201的股骨31的部分31c、部分31d及胫骨32的部分32c各自的大小、从检测面到外侧髁31b的高度b以及内侧髁31a与外侧髁31b的实际距离D相关联地存储。即,处理部681通过获取作为参数信息而被检测出的作为检测对象部分的被检体201的股骨31的部分31c、部分31d以及胫骨32的部分32c的大小,来计算作为被检体201所固有的源自体格的参数的高度b和距离D。
处理部681通过使用像这样获取到的高度b和距离D来利用上述式(2)计算倾斜度α的值。此外,关于作为源自姿势的参数的角度θ,既可以根据成为摄影对象的身体的部位等而自动地设定推荐的值,也可以通过使用光学摄像机等检测被检体201的姿势来检测出值。然后,处理部681使用反映了源自体格的参数的倾斜度α,通过上述式(1)来计算估计位置x’,由此计算与按每个被检体201而不同的骨头的大小及形状相应的位置校正信息。
此外,第二实施方式的X射线摄影装置600的其它结构与上述第一实施方式相同。即,预拍摄图像24的获取、从预拍摄图像24中的偏移量f
(第二实施方式的摄影位置校正方法)
接着,参照图22对第二实施方式的X射线摄影装置600的摄影位置校正方法的处理流程进行说明。在图22中,对使用了自动校正模式的位置校正的处理流程进行说明。
首先,在步骤701和步骤702中,分别进行与第一实施方式的步骤301及302相同的处理。然后,在步骤702完成后,处理步骤转移到步骤703。此外,步骤701是本公开的“照射步骤”的一例。另外,步骤702是本公开的“检测步骤”的一例。
在步骤703中,获取同被检体201的骨头(摄影对象物)的内侧髁31a与外侧髁31b(多个规定部分)之间的实际距离对应的参数信息。具体地说,作为参数信息,从在步骤702中拍摄到的预拍摄图像24中检测股骨31的部分31c、部分31d以及胫骨32的部分32c的各部分(检测对象部分)的大小。
然后,在步骤704中,基于参数信息来计算位置校正信息。具体地说,基于作为参数信息而获取到的股骨31的部分31c、部分31d以及胫骨32的部分32c的大小来获取高度b和距离D。然后,基于获取到的高度b和距离D来计算倾斜度α,由此基于从预拍摄图像24获取到的偏移(多个规定部分的外缘之间的位置关系)来获取位置校正信息。此外,步骤704是本公开的“校正信息获取步骤”的一例。
然后,在步骤705中,与第一实施方式的步骤304同样地进行自动位置校正。此外,步骤704是本公开的“位置校正步骤”的一例。
此外,在执行使用了手动校正模式的位置校正处理的情况下,与第一实施方式同样地,在通过进行与自动校正模式下的步骤701、702、703及704相同的处理来获取位置校正信息之后,与第一实施方式的步骤404同样地进行位置校正信息的显示,与步骤405同样地进行手动位置校正。
(第二实施方式的效果)
在第二实施方式中,能够得到如下效果。
处理部681(校正信息获取部)构成为基于与被检体201的骨头(摄影对象物)的多个规定部分(内侧髁31a和外侧髁31b)之间的实际距离对应的参数信息来计算位置校正信息。如果像这样构成,则即使在由于骨头的大小和形状按每个被检体201不同而导致被检体201的骨头的规定部分之间的实际距离不同的情况下,也能够通过基于与规定部分之间的实际距离对应的参数信息计算位置校正信息来更准确地计算位置校正信息。因此,能够使用获取到的位置校正信息更高精度地校正摄影位置,因此能够进一步减少反复进行X射线图像的摄影和摄影位置的校正的次数。其结果,能够进一步抑制X射线摄影中的辐射量和摄影时间的增加。
处理部681(校正信息获取部)检测被检体201的检测对象部分(股骨31的部分31c、部分31d以及胫骨32的部分32c)在被检体201的X射线图像中的大小,来作为参数信息。如果像这样构成,则通过从被检体201的X射线图像中检测出检测对象部分的大小来作为参数信息,能够以更准确地反映作为被检体201的体内构造的股骨31和胫骨32的大小和形状的差异的方式获取参数信息。因此,通过使用从被检体201的X射线图像中检测到的参数信息来获取位置校正信息,能够更准确地获取校正摄影位置所需的相对移动方向和相对移动量。其结果,能够更准确地进行摄影位置的校正。
处理部681(校正信息获取部)从为了获取位置校正信息而拍摄到的X射线图像即预拍摄图像24中检测被检体201的检测对象部分(股骨31的部分31c、部分31d以及胫骨32的部分32c)的大小,来作为参数信息。如果像这样构成,则能够使用为了获取位置校正信息而拍摄到的预拍摄图像24获取参数信息,因此与为了获取参数信息而与预拍摄图像24的摄影分开地进行X射线摄影的情况不同,能够抑制对被检体201照射的X射线的剂量增加。因此,通过从预拍摄图像24获取参数信息,能够更准确地进行摄影位置的校正,并且能够进一步抑制X射线摄影中的辐射量和摄影时间的增加。
此外,第二实施方式的其它效果与上述第一实施方式相同。
[第三实施方式]
参照图23和图24对第三实施方式进行说明。在该第三实施方式中,与构成为由处理部681从预拍摄图像24中检测被检体201的检测对象部分(股骨31的部分31c、部分31d以及胫骨32的部分32c)的大小来作为用于设定倾斜度α的参数信息的第二实施方式不同,基于外观图像25来获取用于设定倾斜度α的参数信息。此外,在图中,对与上述第一实施方式及第二实施方式相同的结构的部分标注相同的附图标记。
(第三实施方式的X射线摄影装置的结构)
如图23所示,X射线摄影装置800具备处理装置808。处理装置808包括处理部881。与第二实施方式的处理装置608同样地,处理装置808例如是由放射线技师等用户202操作的PC。与第二实施方式的处理部681同样地,处理部881包括CPU、GPU以及RAM等。处理部881是本公开的“校正信息获取部”的一例。与第二实施方式的处理部681同样地,处理部881通过上述式(2)自动地计算倾斜度α。在第三实施方式中,例如由X射线摄影装置800进行被检体201的膝盖的X射线摄影。
在第三实施方式中,X射线摄影装置800具备摄像部811和图像处理部812。摄像部811拍摄被检体201的外观。摄像部811例如配置于X射线照射部1。摄像部811沿着从X射线照射部1照射的X射线的照射方向拍摄躺卧在顶板3上的被检体201。另外,摄像部811例如包括CCD(Charge Coupled Device:电荷耦合元件)或CMOS(Complementary Metal OxideSemiconductor:互补金属氧化物半导体)等图像传感器(摄像元件)。图像处理部812例如包括CPU或FPGA等处理器。另外,图像处理部812包括用于存储各种参数和程序的HDD或SSD等非易失性的存储介质。图像处理部812通过获取来自摄像部811的信号,来获取拍摄被检体201的外观而得到的外观图像25(参照图24)。图像处理部812是与处理部881分开设置的模块。图像处理部812例如与摄像部811一起配置于X射线照射部1。而且,图像处理部812构成为能够与处理部881进行通信。
然后,如图24所示,在第三实施方式中,图像处理部812根据通过由摄像部811进行的摄像而获取到的被检体201的外观图像25,计算表示被检体201的体格大小的体格信息,来作为用于计算上述式(2)中的倾斜度α的参数信息。具体地说,图像处理部812计算被检体201的腿部的长度来作为体格信息。图像处理部812从基于来自摄像部811的信号获取到的外观图像25中检测被检体201的腿部的部分201a和部分201b的长度。部分201a是从被检体201的腿部的根部到膝盖的部分。部分201b是从被检体201的腿部的膝盖到脚尖的部分。图像处理部812例如使用预先存储在存储介质中的学习完毕模型,从外观图像25中提取被检体201的腿部的部分201a和部分201b,由此对部分201a和部分201b的长度进行检测。由此,图像处理部812从外观图像25中检测出表示被检体201的腿部的长度的体格信息来作为参数信息。
然后,与第二实施方式的处理部681同样地,图像处理部812例如通过参照在存储介质中预先设定的数据表,来根据作为参数信息而被检测出的表示被检体201的腿部的长度的体格信息计算出用于计算位置校正信息的高度b和距离D的值。在预先设定的数据表中,将体格信息、从检测面到外侧髁31b的高度b以及内侧髁31a与外侧髁31b的实际距离D相关联地存储。即,在第三实施方式中,图像处理部812通过获取作为参数信息的体格信息,来计算作为被检体201所固有的源自体格的参数的高度b和距离D。而且,在第三实施方式中,由图像处理部812计算出的高度b和距离D被输出到处理装置808的处理部881。
通过使用像这样获取到的高度b和距离D,处理部881与第二实施方式的处理部681同样地通过上述式(2)来计算倾斜度α的值,并通过上述式(1)来计算估计位置x’,由此计算出与按每个被检体201而不同的骨头的大小及形状相应的位置校正信息。即,在第三实施方式中,处理部881构成为基于由图像处理部812根据外观图像25计算出的体格信息即参数信息来计算位置校正信息。
此外,第三实施方式的X射线摄影装置800的其它结构与上述第一实施方式及第二实施方式相同。
(第三实施方式的效果)
在第三实施方式中,能够得到如下效果。
在第三实施方式中,具备拍摄被检体201的外观的摄像部811。而且,处理部881(校正信息获取部)基于根据通过摄像部811进行的摄像而获取到的被检体201的外观图像25计算出的表示被检体201的体格大小的体格信息即参数信息,来计算位置校正信息。如果像这样构成,则能够基于外观图像25获取表示被检体201的体格大小的体格信息即参数信息,因此能够获取与被检体201的体格大小对应的位置校正信息。因此,能够以与被检体201的体格大小对应的方式更准确地获取校正摄影位置所需的相对移动方向和相对移动量,因此能够更准确地进行摄影位置的校正。
此外,第三实施方式的其它效果与上述第一实施方式及第二实施方式相同。
[第四实施方式]
参照图25和图26对第四实施方式进行说明。在该第四实施方式中,与构成为由处理部681从预拍摄图像24获取参数信息的第二实施方式不同,由处理部981获取用于基于正面图像26设定倾斜度α的参数信息,该正面图像26是与预拍摄图像24分开地预先获取到的X射线图像。此外,在图中,对与上述第一实施方式~第三实施方式相同结构的部分标注相同的附图标记。
(第四实施方式的X射线摄影装置的结构)
如图25所示,X射线摄影装置900具备处理装置908。处理装置908包括处理部981。与第二实施方式的处理装置608同样地,处理装置908例如是由放射线技师等用户202操作的PC。与第二实施方式的处理部681同样地,处理部981包括CPU、GPU以及RAM等。与第二实施方式的处理部681同样地,处理部981通过上述式(2)自动地计算倾斜度α。此外,处理部981是本公开的“校正信息获取部”的一例。在第四实施方式中,例如由X射线摄影装置900进行被检体201的膝盖的X射线摄影。
如图26所示,在第四实施方式中,处理部981获取以与作为用于获取位置校正信息的X射线图像的预拍摄图像24不同的摄影角度预先拍摄到的X射线图像即正面图像26。然后,处理部981从正面图像26中检测被检体201的检测对象部分的大小,来作为用于计算倾斜度α的参数信息。具体地说,正面图像26是与从侧面侧拍摄被检体201的膝盖而得到的预拍摄图像24分开地预先从正面侧拍摄被检体201的膝盖所得到的X射线图像。在比预拍摄图像24靠前的定时拍摄正面图像26并将其预先存储于存储部82。而且,从正面图像26中检测到的被检体201的检测对象部分是被检体201的股骨31的从内侧髁31a到外侧髁31b为止的部分31e以及从外侧髁31b到被检体201的与正中线侧相反一侧的皮肤为止的部分31f。因而,在第四实施方式中,大小被检测为参数信息的被检体201的检测对象部分是作为以规定的位置关系拍摄到的对象的、被检体201的摄影对象物的多个规定部分。
处理部981在进行预拍摄图像24的摄影之前,从预先拍摄到的正面图像26中检测内侧髁31a和外侧髁31b的位置。例如,处理部981通过基于预先存储的学习完毕模型进行的分割处理来提取股骨31的轮廓,并且将所提取出的股骨31的轮廓线中的、在内侧髁31a处最靠近胫骨32侧的部分和在外侧髁31b处最靠近胫骨32侧的部分分别检测为内侧髁31a的位置和外侧髁31b的位置。然后,处理部981将从内侧髁31a的位置到外侧髁31b的位置的大小(距离)检测为被检体201的检测对象部分即部分31e的大小。另外,同样地,处理部981通过检测被检体201的皮肤在正面图像26中的位置,来将从外侧髁31b的位置到皮肤的位置的大小(距离)检测为被检体201的检测对象部分即部分31f的大小。在此,部分31e的大小相当于内侧髁31a与外侧髁31b的实际距离D。另外,部分31f的大小相当于从检测面到外侧髁31b的高度b。即,在第四实施方式中,处理部981从在与预拍摄图像24不同的摄影角度下分开地拍摄到的正面图像26中直接检测高度b和距离D的值来作为参数信息。
然后,与第二实施方式的处理部681同样地,处理部981通过使用作为参数信息而被检测出的从检测面到外侧髁31b的高度b(部分31f的大小)以及内侧髁31a与外侧髁31b的实际距离D(部分31e的大小),来利用上述式(2)计算倾斜度α的值,并利用上述式(1)计算估计位置x’,从而计算与按每个被检体201而不同的骨头的大小及形状相应的位置校正信息。
此外,第四实施方式的X射线摄影装置900的其它结构与上述第一实施方式~第三实施方式相同。
(第四实施方式的效果)
在第四实施方式中,能够得到如下效果。
处理部981(校正信息获取部)从正面图像26中检测被检体201的检测对象部分(部分31e和部分31f)的大小来作为参数信息,该正面图像26是以与作为用于获取位置校正信息的X射线图像的预拍摄图像24不同的摄影角度预先拍摄到的X射线图像。如果像这样构成,则通过从以与用于校正位置的X射线图像(预拍摄图像24)不同的摄影角度拍摄到的X射线图像(正面图像26)中检测检测对象部分的大小,能够检测从与预拍摄图像24不同的摄影角度来看的多个规定部分(内侧髁31a与外侧髁31b)之间的位置关系。因此,能够基于从与预拍摄图像24不同的摄影角度来看的多个规定部分之间的位置关系获取更准确的位置校正信息。
此外,第四实施方式的其它效果与上述第一实施方式~第三实施方式相同。
[变形例]
此外,应该认为本次公开的实施方式在所有方面均为例示,而非限制性的。本发明的范围不是通过上述实施方式的说明而是通过权利要求书来示出。还包括与权利要求书等同的意义及范围内的所有变更(变形例)。
例如,在上述第一实施方式~第四实施方式中示出了以下例子:处理部81、681、881、981(校正信息获取部)构成为基于X射线图像中的被检体201的骨头的多个规定部分的外缘之间的位置关系,来获取用于校正X射线照射部1相对于被检体201的骨头的相对位置的位置校正信息,但本发明不限于此。在本发明中,校正信息获取部也可以构成为基于X射线图像中的被检体的一个人工关节的多个规定部分的外缘之间的位置关系来获取用于校正X射线照射部相对于被检体的人工关节的相对位置的位置校正信息。另外,X射线摄影装置的校正信息获取部也可以构成为无论在拍摄骨头时还是在拍摄人工关节时都获取位置校正信息。此外,人工关节是本公开的“摄影对象物”的一例。
另外,在上述第一实施方式~第四实施方式中示出了显示由处理部81、681、881、981(校正信息获取部)获取到的位置校正信息以及基于位置校正信息进行用于变更X射线照射部1相对于被检体201的骨头的相对位置的控制的例子,但本发明不限于此。在本发明中,X射线摄影装置也可以仅进行由校正信息获取部获取到的位置校正信息的通知。在该情况下,放射线技师等用户基于所通知的位置校正信息,通过手动方式进行摄影位置的校正。另外,X射线照射部相对于被检体的骨头或人工关节(摄影对象物)的相对位置的校正也可以通过用户使被检体移动或者通过被检体进行移动来进行。另外,X射线摄影装置也可以构成为不进行由校正信息获取部获取到的位置校正信息的通知而自动地进行摄影位置的校正。
另外,在上述第一实施方式~第四实施方式中示出了以下例子:装置控制部7(移动控制部)基于由处理部81、681、881、981(校正信息获取部)获取到的位置校正信息使X射线照射部1的位置自动地移动,以使X射线照射部1相对于被检体201的骨头的相对位置成为能够拍摄到多个规定部分的外缘之间的位置关系以规定的位置关系映现的X射线图像的位置,但本发明不限于此。在本发明中,也可以在对X射线照射部相对于被检体的骨头或人工关节(摄影对象物)的相对位置进行校正时,使X射线照射部和载置有被检体的顶板这两方自动地移动来进行摄影位置的校正。另外,在对X射线照射部相对于被检体的骨头或人工关节(摄影对象物)的相对位置进行校正时,也可以仅使载置有被检体的顶板自动地移动来进行摄影位置的校正。
另外,在上述第一实施方式~第四实施方式中示出了以下例子:在基于用户202的操作使X射线照射部1移动时,装置控制部7(移动控制部)基于由处理部81、681、881、981(校正信息获取部)获取到的位置校正信息来进行用于限制X射线照射部1的移动的控制,但本发明不限于此。在本发明中,X射线摄影装置也可以构成为在用户正进行操作时不进行X射线照射部的移动限制。另外,X射线摄影装置也可以构成为基于用户的操作来限制X射线照射部的移动和解除移动的限制。另外,在本发明中,移动控制部也可以在基于用户的操作而使载置有被检体的顶板移动时,基于由校正信息获取部获取到的位置校正信息进行用于限制载置有被检体的顶板的移动的控制。例如,移动控制部也可以通过进行由制动器对顶板的移动施加锁定的控制来限制通过移动机构进行的顶板的移动。由此,即使在通过用户以手动操作的方式使载置有被检体的顶板移动来进行摄影位置的校正的情况下,也能够由移动控制部基于位置校正信息限制载置有被检体的顶板的移动。其结果,能够在通过用户以手动操作方式使载置有被检体的顶板移动来进行摄影位置的校正的情况下,防止由于用户的手动操作而使载置有被检体的顶板以超过校正所需的移动量的方式移动以及载置有被检体的顶板向需要校正的移动方向以外的方向移动。
另外,在上述第一实施方式~第四实施方式中示出了以下例子:显示部91构成为显示基于由处理部81、681、881、981(校正信息获取部)获取到的多个规定部分的外缘之间的相对位置偏移的、X射线照射部1相对于被检体201的骨头的相对移动方向和相对移动量,来作为由处理部81(681、881、981)获取到的位置校正信息的通知,但本发明不限于此。在本发明中,显示部也可以显示X射线照射部相对于被检体的骨头的相对移动方向和相对移动量中的仅X射线照射部的相对移动方向。在该情况下,在通过用户的手动操作而移动的X射线照射部到达基于位置校正信息获取到的恰当的摄影位置时,X射线摄影装置通过对X射线照射部的移动进行限制(施加锁定)来完成摄影位置的校正。
另外,在上述第一实施方式~第四实施方式中示出了以下例子:在拍摄膝关节(股骨31的膝侧)时,根据位置校正信息将X射线照射部1相对于被检体201的骨头或人工关节(摄影对象物)的相对位置校正为能够拍摄到多个规定部分的外缘彼此重叠地映现的X射线图像的位置,但本发明不限于此。在本发明中,也可以如图17所示,在将肩胛骨39拍摄为Y字形的被称为肩胛骨Y(Scapula Y)的拍摄时,获取用于将摄影位置校正为能够拍摄到肩胛骨39的多个规定部分的外缘彼此重叠且肩胛骨39映现为Y字形的X射线图像的位置的位置校正信息。而且,也可以基于获取到的位置校正信息来校正X射线照射部相对于被检体的相对位置。由此,能够拍摄到能够用于高精度地确定前方脱臼、肩峰下骨刺及钙化等肩胛骨39周边的疾病的X射线图像。
另外,在上述第一实施方式~第四实施方式中示出了以下例子:X射线摄影装置100(600、800、900)在拍摄膝关节(股骨31的膝侧)和拍摄肘关节(肱骨36的膝侧)时,计算位置校正信息并且基于位置校正信息进行摄影位置的校正,但本发明不限于此。在本发明中,X射线摄影装置也可以构成为:在拍摄股关节、指关节、手腕关节以及脚踝关节等其它关节以及其它部位时,计算位置校正信息并且基于位置校正信息进行摄影位置的校正。
另外,在上述第一实施方式~第四实施方式中示出了以下例子:X射线摄影装置100(600、800、900)在拍摄膝关节(股骨31的膝侧)和肘关节(肱骨36的肘侧)时获取位置校正信息,显示(通知)所获取到的位置校正信息并且基于获取到的位置校正信息进行用于变更X射线照射部1的相对位置的控制,但本发明不限于此。在本发明中,X射线摄影装置也可以构成为:仅在拍摄膝关节(股骨的膝侧)时和拍摄肘关节(肱骨的肘侧)时中的任一方,获取位置校正信息,并通知所获取到的位置校正信息或者基于获取到的位置校正信息进行用于变更X射线照射部的相对位置的控制。即,X射线摄影装置也可以仅针对特定的摄影部位获取位置校正信息,并通知所获取到的位置校正信息或者基于获取到的位置校正信息进行用于变更X射线照射部的相对位置的控制。
另外,在上述第一实施方式~第四实施方式中示出了以下例子:处理部81、681、881、981(校正信息获取部)构成为基于预拍摄图像24(位置校正前图像)中的被检体201的骨头的多个规定部分的外缘之间的位置关系来获取位置校正信息,该预拍摄图像24是基于放射线量比拍摄正式照射图像23(位置校正后图像)时的放射线量少的X射线的照射而生成的图像,该正式照射图像23是在校正了X射线照射部1相对于被检体201的骨头的相对位置之后拍摄到的图像,但本发明不限于此。在本发明中,校正信息获取部获取位置校正信息所使用的图像也可以是基于放射线量为拍摄在校正了X射线照射部的相对位置之后拍摄到的位置校正后图像时的放射线量以上的X射线的照射而生成的X射线图像。另外,校正信息获取部获取位置校正信息所使用的图像也可以是对基于放射线量为拍摄在校正了X射线照射部的相对位置之后拍摄到的位置校正后图像时的放射线量以上的X射线的照射而生成的X射线图像进行了如上述第一实施方式~第四实施方式所示的预处理之后的图像。
另外,在上述第一实施方式~第四实施方式中示出了以下例子:处理部81、681、881、981(校正信息获取部)构成为对学习完毕模型82a和82b输入X射线图像,由此基于所输入的X射线图像获取多个规定部分的外缘,并基于获取到的多个规定部分的外缘来计算位置校正信息,但本发明不限于此。在本发明中,关于股骨的内侧髁和外侧髁等用于计算偏移量的多个规定部分的外缘的获取(确定),也可以通过如提取多个规定部分的外缘的特征点那样的图像处理算法来获取(确定)。另外,在获取用于获取被检体所固有的源自体格的参数的参数信息的情况下,也可以不使用学习完毕模型,而使用如提取特征点那样的图像处理算法。
另外,在上述第一实施方式~第四实施方式中示出了以下例子:处理部81、681、881、981(校正信息获取部)构成为基于所输入的X射线图像来获取多个规定部分的外缘,并基于获取到的多个规定部分的外缘来计算位置校正信息,但本发明不限于此。在本发明中,校正信息获取部也可以在获取被检体的骨头或人工关节(摄影对象物)的多个规定部分的外缘以及计算位置校正信息时,除了使用X射线图像以外,还使用由检测可见光的光学摄像机拍摄到的被检体的可见光图像。
另外,在上述第一实施方式~第四实施方式中示出了X射线摄影装置100(600、800、900)构成为能够基于用户202的切换操作使进行摄影位置的校正的模式在自动校正模式与手动校正模式之间切换的例子,但本发明不限于此。在本发明中,使用了X射线摄影装置的摄影位置校正也可以仅进行自动校正和手动校正中的某一方。
另外,在上述第一实施方式~第四实施方式中示出了X射线摄影装置100(600、800、900)构成为通过由从顶棚悬垂下来的X射线照射部1照射的X射线来进行X射线图像的摄影的例子,但本发明不限于此。本发明也可以应用于如图18所示那样具备沿着与地面交叉的方向(Z方向)延伸的照射部支承机构504和被照射部支承机构504支承的X射线照射部501的X射线摄影装置500。即,X射线摄影装置也可以构成为通过从安装在沿着与地面交叉的方向(Z方向)延伸的照射部支承机构504的X射线照射部501照射的X射线来进行X射线图像的摄影。另外,在使用了X射线摄影装置500的摄影位置校正中,如图19所示那样在操作终端509的显示部591中显示位置校正信息,通过用户202的手动操作进行摄影位置的校正。此外,在操作终端509的显示部591中设置有用于接受用户202的输入操作的触摸面板。
另外,在上述第二实施方式~第四实施方式中示出了基于自动获取到的参数信息来计算作为用于计算位置校正信息的系数的倾斜度α的例子,但本发明不限于此。在本发明中,也可以基于由用户进行的输入操作来获取参数信息。另外,也可以由与计算位置校正信息的处理部681、881、981(校正信息获取部)不同的处理装置根据X射线图像或外观图像等计算参数信息。另外,也可以从服务器等外部装置获取预先设定(存储)的参数信息。另外,参数信息也可以包含用于计算位置校正信息的被检体固有参数的值(高度b和距离D等)。
另外,在上述第二实施方式中示出了以下例子:作为参数信息,将被检体201的股骨31的部分31c、部分31d以及胫骨32的部分32c的大小检测为被检体201的检测对象部分的大小,但本发明不限于此。在本发明中,也可以获取股骨31的部分31c、31d以及胫骨32的部分32c中的至少一个部分的大小来作为参数信息。另外,也可以在进行膝盖的X射线摄影的情况下,将除部分31c、部分31d以及部分32c以外的部分的大小检测为被检体的检测对象部分的大小。
另外,在上述第三实施方式中,示出了获取表示被检体201的腿部的长度的体格信息来作为参数信息的例子,但本发明不限于此。在本发明中,也可以检测被检体的整个身体的身高,并且获取表示所检测出的被检体的身高的体格信息来作为参数信息。另外,也可以在进行肘关节的X射线摄影的情况下,获取表示手臂的长度的体格信息来作为参数信息。另外,也可以获取表示肩宽、体厚等的体格信息来作为参数信息。另外,在上述第三实施方式中示出了由与进行位置校正信息的计算的处理部881(校正信息获取部)不同的模块即图像处理部812进行从外观图像25获取参数信息的处理的例子,但也可以将由摄像部得到的外观图像输出到校正信息获取部,由此校正信息获取部从外观图像中检测体格信息来获取参数信息。
另外,在上述第三实施方式中示出了由配置于X射线照射部1的摄像部811拍摄躺卧在顶板3上的被检体201的例子,但本发明不限于此。在本发明中,摄像部也可以不配置于X射线照射部,而配置于检查室的顶棚部分等。另外,也可以不拍摄躺卧在顶板上的被检体,而通过拍摄站立状态的被检体来获取参数信息。
另外,在上述第一实施方式~第四实施方式中,为了便于说明,使用按照处理流程依次进行处理的流程驱动型的流程图对使用了本发明的X射线摄影装置的摄影位置校正(自动校正和手动校正)的处理进行了说明,但本发明不限于此。在本发明中,也可以通过以事件为单位执行处理的事件驱动型(event-driven type)处理来进行使用了X射线摄影装置的摄影位置校正处理。在该情况下,既可以完全以事件驱动型来进行,也可以将事件驱动与流程驱动组合来进行。
[项目]
本领域技术人员能够理解的是,上述例示性的实施方式是以下方式的具体例。
(项目1)
一种X射线摄影装置,具备:
X射线照射部,其对被检体照射X射线;
X射线检测部,其检测从所述X射线照射部照射并透过了所述被检体的X射线;以及
校正信息获取部,其确定基于所述X射线检测部的检测信号拍摄到的X射线图像中的、所述被检体的一个摄影对象物的多个规定部分各自的外缘,并基于所确定的所述多个规定部分的外缘之间的位置关系来获取用于校正所述X射线照射部相对于所述被检体的所述摄影对象物的相对位置的位置校正信息,
其中,所述位置校正信息包含用于将所述X射线照射部相对于所述被检体的所述摄影对象物的相对位置校正为能够拍摄到所述多个规定部分的外缘之间的位置关系以规定的位置关系映现的所述X射线图像的位置的相对移动方向和相对移动量。
(项目2)
根据项目1所述的X射线摄影装置,其中,
所述X射线摄影装置构成为进行以下处理中的至少一方:通知由所述校正信息获取部获取到的所述位置校正信息;以及基于所述位置校正信息进行用于变更所述X射线照射部相对于所述被检体的所述摄影对象物的相对位置的控制。
(项目3)
根据项目2所述的X射线摄影装置,其中,还具备:
移动机构,其使所述X射线照射部相对于所述被检体的相对位置变更;以及
移动控制部,其进行用于所述移动机构变更所述X射线照射部相对于所述被检体的相对位置的控制,
其中,所述移动控制部构成为:基于由所述校正信息获取部获取到的所述位置校正信息来进行用于所述移动机构变更所述X射线照射部相对于所述被检体的所述摄影对象物的相对位置的控制。
(项目4)
根据项目3所述的X射线摄影装置,其中,
还具备用于载置所述被检体的顶板,
所述移动控制部基于由所述校正信息获取部获取到的所述位置校正信息来进行用于使所述X射线照射部和所述顶板中的至少一方的位置自动地移动的控制,以使所述X射线照射部相对于所述被检体的所述摄影对象物的相对位置成为能够拍摄到所述多个规定部分的外缘之间的位置关系以所述规定的位置关系映现的所述X射线图像的位置。
(项目5)
根据项目3所述的X射线摄影装置,其中,
还具备用于载置所述被检体的顶板,
在基于用户的操作使所述X射线照射部和所述顶板中的一方移动时,所述移动控制部基于由所述校正信息获取部获取到的所述位置校正信息来进行用于限制所述X射线照射部和所述顶板中的一方的移动的控制。
(项目6)
根据项目2~5中的任一项所述的X射线摄影装置,其中,
还具备显示部,所述显示部显示用于校正为能够拍摄到所述多个规定部分的外缘之间的位置关系以所述规定的位置关系映现的所述X射线图像的位置的、所述X射线照射部相对于所述被检体的所述摄影对象物的相对移动方向和相对移动量中的至少所述X射线照射部的相对移动方向,来作为由所述校正信息获取部获取到的所述位置校正信息的通知。
(项目7)
根据项目2~6中的任一项所述的X射线摄影装置,其中,
所述校正信息获取部构成为:基于所述X射线图像中的所述被检体的一个所述摄影对象物的多个规定部分的外缘之间的位置关系,来获取所述X射线图像中的所述多个规定部分的外缘之间的相对位置偏移,并基于获取到的所述多个规定部分的外缘之间的相对位置偏移来获取所述位置校正信息。
(项目8)
根据项目2~7中的任一项所述的X射线摄影装置,其中,
所述校正信息获取部构成为:确定所述X射线图像中的、作为所述被检体的一个所述摄影对象物的骨头或人工关节的所述多个规定部分各自的外缘,并基于所确定的骨头或人工关节的所述多个规定部分的外缘之间的位置关系来获取用于校正所述X射线照射部相对于所述被检体的骨头或人工关节的相对位置的所述位置校正信息。
(项目9)
根据项目8所述的X射线摄影装置,其中,
所述校正信息获取部构成为:基于所述X射线图像中的所述被检体的骨头或人工关节各自的所述多个规定部分的外缘之间的重叠情况来获取所述多个规定部分的外缘之间的相对位置偏移,并且计算用于将所述X射线照射部相对于所述被检体的骨头或人工关节的相对位置校正为能够拍摄到所述多个规定部分的外缘彼此重叠地映现的所述X射线图像的位置的所述位置校正信息。
(项目10)
根据项目9所述的X射线摄影装置,其中,
所述校正信息获取部构成为:在拍摄所述被检体的股骨的膝侧和肩胛骨中的至少一方时,计算用于将所述X射线照射部相对于所述被检体的骨头或人工关节的相对位置校正为能够拍摄到所述多个规定部分的外缘彼此重叠地映现的所述X射线图像的位置的所述位置校正信息。
(项目11)
根据项目8~10中的任一项所述的X射线摄影装置,其中,
所述校正信息获取部构成为:基于所述X射线图像中的所述被检体的骨头或人工关节各自的所述多个规定部分的外缘之间的位置关系来获取所述多个规定部分的外缘之间的相对位置偏移,并且计算用于将所述X射线照射部相对于所述被检体的骨头或人工关节的相对位置校正为能够拍摄到所述多个规定部分的外缘同心圆状地映现的所述X射线图像的位置的所述位置校正信息。
(项目12)
根据项目11所述的X射线摄影装置,其中,
所述校正信息获取部构成为:在拍摄所述被检体的肱骨的肘侧时,计算用于将所述X射线照射部相对于所述被检体的骨头或人工关节的相对位置校正为能够拍摄到所述多个规定部分的外缘同心圆状地映现的所述X射线图像的位置的所述位置校正信息。
(项目13)
根据项目1~12中的任一项所述的X射线摄影装置,其中,
所述校正信息获取部构成为基于位置校正前图像中的所述被检体的所述摄影对象物的所述多个规定部分的外缘之间的位置关系来获取所述位置校正信息,所述位置校正前图像是基于放射线量比拍摄位置校正后图像时的放射线量少的X射线的照射而生成的,所述位置校正后图像是在校正了所述X射线照射部相对于所述被检体的所述摄影对象物的相对位置之后拍摄到的所述X射线图像。
(项目14)
根据项目1~13中的任一项所述的X射线摄影装置,其中,
所述校正信息获取部构成为:对将拍摄所述摄影对象物得到的所述X射线图像作为输入数据进行机器学习所得到的学习完毕模型输入所述X射线图像,由此基于所输入的所述X射线图像来获取所述多个规定部分的外缘,并基于获取到的所述多个规定部分的外缘来计算所述位置校正信息。
(项目15)
根据项目1~14中的任一项所述的X射线摄影装置,其中,
所述校正信息获取部构成为:基于与所述被检体的所述摄影对象物的所述多个规定部分之间的实际距离对应的参数信息来计算所述位置校正信息。
(项目16)
根据项目15所述的X射线摄影装置,其中,
所述校正信息获取部检测所述被检体的检测对象部分在所述被检体的所述X射线图像中的大小,来作为所述参数信息。
(项目17)
根据项目16所述的X射线摄影装置,其中,
所述校正信息获取部从为了获取所述位置校正信息而拍摄到的所述X射线图像中检测所述被检体的所述检测对象部分的大小,来作为所述参数信息。
(项目18)
根据项目16所述的X射线摄影装置,其中,
所述校正信息获取部从以与用于获取所述位置校正信息的所述X射线图像不同的摄影角度预先拍摄到的所述X射线图像中检测所述被检体的所述检测对象部分的大小,来作为所述参数信息。
(项目19)
根据项目15所述的X射线摄影装置,其中,
还具备拍摄所述被检体的外观的摄像部,
所述校正信息获取部构成为基于作为体格信息的所述参数信息来计算所述位置校正信息,所述体格信息是根据通过由所述摄像部进行的摄像而获取到的所述被检体的外观图像计算出的、表示所述被检体的体格的大小的信息。
(项目20)
一种摄影位置校正方法,包括以下步骤:
照射步骤,从X射线照射部对被检体照射X射线;
检测步骤,检测透过了所述被检体的X射线;以及
校正信息获取步骤,确定基于所述检测步骤中的X射线的检测而拍摄到的X射线图像中的、所述被检体的一个摄影对象物的多个规定部分各自的外缘,并基于所确定的所述多个规定部分的外缘之间的位置关系来获取用于校正所述X射线照射部相对于所述被检体的所述摄影对象物的相对位置的位置校正信息,
其中,所述位置校正信息包含用于将所述X射线照射部相对于所述被检体的所述摄影对象物的相对位置校正为能够拍摄到所述多个规定部分的外缘之间的位置关系以规定的位置关系映现的所述X射线图像的位置的相对移动方向和相对移动量。
(项目21)
根据项目20所述的摄影位置校正方法,其中,
还包括位置校正步骤,在所述位置校正步骤中,进行以下处理中的至少一方:通知在所述校正信息获取步骤中获取到的所述位置校正信息、以及基于所述位置校正信息进行用于变更所述X射线照射部相对于所述被检体的所述摄影对象物的相对位置的控制。
(项目22)
根据项目20或21所述的摄影位置校正方法,其中,
所述校正信息获取步骤包括基于与所述被检体的所述摄影对象物的所述多个规定部分之间的实际距离对应的参数信息来计算所述位置校正信息的所述校正信息获取步骤。