一种菱形柔性绳网的伞形折叠建模方法
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及绳网抓捕技术领域,特别是涉及一种菱形柔性绳网的伞形折叠建模方法。
背景技术
柔性绳网在渔业、航空航天、防护等领域应用广泛,如卫星捕捉、防护网等。柔性绳网由纤维绳索编织而成,具有质量轻、强度高、可折叠收纳并展开的特点。柔性拦截网系统是由拦截弹发射大尺寸柔性绳网来捕获在大气层内飞行的目标,主要由拦截弹、结构舱和柔性绳网组成。其中柔性绳网在抓捕过程中经历绳网展开,与目标碰撞和收口。该系统是一种对目标拦截的新型技术,其防御面积(垂向投影面积)的大小是影响其防御效能的关键指标,而分析该柔性绳网的防御面积通常需要进行动力学有限元仿真。为完成有限元分析并考察不同大小柔性绳网特性,第一步便是建立参数化柔性绳网折叠模型。
但是,绳网折叠前后形状变化极大,在提高折叠次数后模型复杂程度极高,难以进行参数化建模。为了完成有限元仿真,现有研究往往忽略了绳网由折叠态初步展开的过程,这种方法无法研究整个绳网展开过程,并且其选取的作为动力学仿真初始态的绳网初步展开形态难以与真实情况相对应,大大降低了动力学仿真结果的可靠性。另有一些研究建立了简单的柔性绳网折叠模型,但该模型为了便于建立,折叠次数很少,模型占用空间较大,无法安装入拦截弹结构舱中,与真实情况差异较大。同时并未考虑参数化建模,无法更改绳长等特定参数来快速生成模型,难以进行对比研究。
对于复杂折叠绳网参数化建模方法,目前鲜有研究。在实际应用中,研究人员大多跳过动力学仿真步骤,直接进行实物实验,从实验中获取绳网展开数据。或者是仅简单参考动力学仿真结果,然后进行实物实验。这都使得柔性拦截网系统研究开展难度大、成本高、进展缓慢。
发明内容
本发明实施例提供了一种菱形柔性绳网的伞形折叠建模方法,解决了现有技术中构造的绳网模型存在的模型占用空间较大、难度大、成本高、进展慢的问题。
本发明提供一种菱形柔性绳网的伞形折叠建模方法,包括以下步骤:
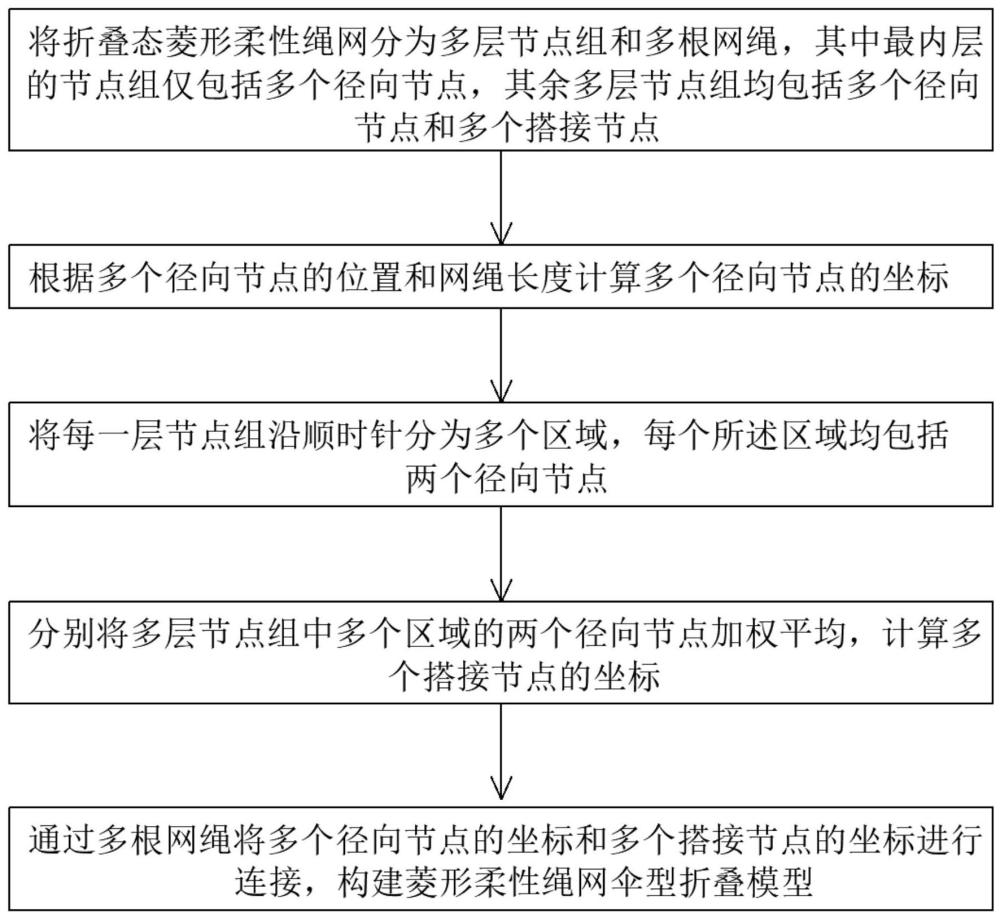
将折叠态菱形柔性绳网分解为多层节点组和多根网绳,其中最内层的节点组仅包括多个径向节点,其余多层节点组均包括多个径向节点和多个搭接节点;每层的多个径向节点围成一个六边形,多个搭接节点分别位于相邻的两个径向节点之间;
根据多个径向节点的位置和网绳长度计算多个径向节点的坐标;
将每一层节点组沿顺时针分为多个区域,每个所述区域均包括两个径向节点;
分别将多层节点组中多个区域的两个径向节点加权平均,计算多个搭接节点的坐标;
通过多根网绳将多个径向节点的坐标和多个搭接节点的坐标进行连接,构建菱形柔性绳网伞型折叠模型。
优选的,根据多个径向节点的位置和网绳长度计算多个径向节点的坐标,包括以下步骤:
测量网绳长度l;
获取多个径向节点与对应网绳的夹角α
获取多个径向节点对应的多个网绳长度l在xoy平面的投影距离r
根据长度l、夹角α
优选的,通过下式计算多个径向节点的坐标:
X
X
其中,
r
式中,X
优选的,通过下式计算多个搭接节点的坐标:
式中X
优选的,通过多根网绳将多个径向节点的坐标和多个搭接节点的坐标进行连接,包括以下步骤:
通过多根网绳将每一层的多个径向节点坐标分别与下一层距离最近的三个任意节点坐标进行连接;
通过多根网绳将每一层的多个搭接节点与下一层的距离最近的两个任意节点进行连接;
在最外层的节点组中相邻的两个任意节点之间引入额外节点,并计算多个额外节点的坐标,通过多根网绳依次将多个任意节点坐标和额外节点坐标进行首尾连接。
优选的,在最外层的节点组中相邻的两个任意节点之间引入额外节点,并计算多个额外节点的坐标,具体包括以下步骤:
计算相邻的两个任意节点之间的距离;
计算相邻的两个任意节点之间的高度差;
根据距离和高度差计算额外节点的坐标。
优选的,通过下式计算额外节点的坐标:
其中,
式中,X′
与现有技术相比,本发明的有益效果是:
本发明先对绳网结构进行简化,将折叠态菱形柔性绳网分为多层节点组和多根网绳,然后计算多个径向节点和多个搭接节点的坐标,通过多根网绳将多个径向节点的坐标和多个搭接节点的坐标进行连接,构建菱形柔性绳网伞型折叠模型。通过该方法,研究人员可以快速地构建出处于折叠状态的绳网的几何模型,从而提高仿真效率。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明的菱形柔性拦截网展开状态示意图;
图2为本发明的柔性拦截网伞形折叠状态侧面示意图;
图3为本发明的一种菱形柔性绳网的伞形折叠建模方法的流程图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参照图3,本发明提供了一种菱形柔性绳网的伞形折叠建模方法,柔性绳网由节点与网绳构成,本方法先确定折叠后节点的坐标位置,之后使用特定算法将节点之间使用网绳连接。
具体包括以下步骤:
第一步:将折叠态菱形柔性绳网分为多层节点组和多根网绳,其中最内层的节点组仅包括多个径向节点,其余多层节点组均包括多个径向节点和多个搭接节点。
参照图1,观察菱形柔性绳网可知,整个绳网节点是由从内到外一圈又一圈的节点构成,称最内圈为k=1,最外圈为k=k
第二步:根据多个径向节点的位置和网绳长度计算多个径向节点的坐标。
参照图2,在雨伞形折叠情况下,节点在z轴方向的大小取决于网绳长度l与网绳夹角α,而在x、y轴方向的大小则取决于网绳长度l在xoy平面的投影r
其径向绳上节点距原点的直线距离在xoy平面的投影距离r
那么对于k=1圈,节点坐标为:
X
在k>1时,观察柔性绳网可知,除了处于径向绳上的节点外,还有处于搭接绳上的节点。对于径向绳上的节点,当k为奇数时,通过下式进行计算:
X
当k为偶数时,通过下式进行计算:
X
式中,X
第三步:将每一层节点组沿顺时针分为多个区域,每个区域均包括两个径向节点;
对于搭接绳上的节点,观察可知,它的x、y坐标可以通过计算在它附近的同圈的径向绳上节点x、y坐标加权平均得出,而z方向坐标与径向绳上节点计算方法一致。具体方法便是对于第k圈,沿顺时针方向划分为p=1,2,…,6个区域,每个区域都是由处于两个径向绳节点连成的直线上的搭接绳节点构成,两个径向绳节点序号分别为(p-1)k+1和pk+1。那么这个区域上搭接绳节点x、y坐标便为该区域的两个径向绳节点坐标的加权平均。那么k>1圈的搭接绳节点坐标为:
式中X
第四步:通过多根网绳将多个径向节点的坐标和多个搭接节点的坐标进行连接,构建菱形柔性绳网伞型折叠模型。
对于方形绳网,只需要将所有节点与附近节点连接起来即可,但对于菱形柔性网,部分绳网不能连接且节点与节点之间不能重复连接,故需要采用特定算法。
对于网绳连接,观察得到对于非外环绳,无需连接同一圈内的节点。参考图1可知,存在两种连线方法,对于径向绳节点,其连接下一圈的3个节点,对于搭接绳节点,其连接下一圈的2个节点,且被连接节点的标号首尾相接。
具体的,对于第k圈的节点,其连接第k+1圈的节点分为两种情况,径向绳节点会连接3个节点,搭接绳节点会连接2个节点。同时,可以观察到被连接节点的标号是首尾相连的,例如:第k圈的i=1为径向绳节点,它会连接k+1圈的i
对于外环绳,难以处理的是同一圈节点之间的连接,随着折叠角度α的减小,柔性绳网最外圈所有节点所连成的封闭曲线长度会随之减小,会使得绳长不足,且绳网难以从折叠态展开,故不能将节点之间直接连接。为此本方法相邻外环绳节点插入额外节点以构成折线。
将外环绳分为六个区域,每个区域都是六边形拦截网的一条边。在xoy平面上,额外节点的位置取决于距离其最近的两个节点的坐标,以及网绳长度。在得出额外点位置后,将节点先与额外点连接,再将额外点与下一个节点连接。
具体计算方法如下:
(1)计算折叠态最外圈相邻两个节点的距离a;
(2)计算高度差
(3)则额外点坐标为:
式中,X′
在连线时,先将
综上所述,该方法能够快速有效地构建菱形柔性拦截网伞形折叠模型。并且通过改变绳长l、折叠角度α和k
本方法的有益效果:
1)提高动力学仿真效率与可靠性:通过该方法,研究人员可以快速地构建出处于折叠状态的绳网的几何模型,从而提高仿真效率。这将有助于减少仿真过程的时间和人力成本,并提高仿真的精度和可靠性。
2)增强柔性拦截网系统研究能力:通过该方法,通过改变模型参数,可以快速构建出不同大小和折叠程度的柔性绳网并开展仿真,提高了柔性拦截网系统仿真部分的研究深度和广度,提高仿真结果的可靠性,为研究人员提供重要参考。
3)降低研究成本并加快研究进展:通过该方法,柔性拦截网系统的一部分实物实验可以被替换为动力学仿真,通过改变仿真参数,即可得出不同工况下拦截网的运动状况,无需重复进行实物实验,节约了研究成本与时间。
4)启发柔性拦截网折叠建模:本方法针对六边形菱形柔性拦截网以伞形折叠形态进行参数化建模,但其方法较为通用。对于不同网格形状,仅需改动网绳连接算法。对于正方形或其他轮廓柔性绳网,主要改动节点坐标即可。对于不同折叠形态,其使用k和i两个参数确定一个节点的方法以及先计算节点坐标再连线的思路也值得参考。
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
- 一种弹体菱形刻槽有限元网格建模的方法
- 一种新型含柔性翅脉节点的昆虫翅膀有限元建模方法
- 一种基于磁悬浮轴承的柔性航天器动力学模型及建模方法
- 考虑失效卫星柔性帆板的绳网拖曳系统建模与控制方法
- 一种空间绳网机器人的逼近动力学建模方法