一种基于边界盒模型的BFOA-Fang高精度定位方法
文献发布时间:2023-06-19 09:26:02
技术领域
本发明属于智慧物联与智慧交通领域,具体涉及一种基于边界盒模型的BFOA-Fang高 精度定位方法,该方法利用边界盒模型的BFOA-Fang高精度定位方法,以减速顶节点为案 例进行验证,实现了定位算法的优化和验证,实现对故障节点的快速精准定位。
背景技术
目前常见的室外技术主要有GPS定位和移动位置基站系统定位。GPS定位的优势是精 确,只要能接收到四颗卫星的定位信号,就可以进行误差在5-10米以内的定位。但GPS受天 气和位置的影响较大。当遇到天气不佳或位置受到遮挡的时候,定位精度较差。移动位置基 站系统定位,只要计算三个基站的信号差异,就可以判断出待测标签所在的位置,但是该技 术在物联网感知层终端上的应用较少,尚且缺乏针对低功耗感知层节点的定位技术研究。因 此,针对现有室外定位技术的不足,有必要提供一种功耗低、速度快,可以无线定位的定位 方法。
发明内容
为克服现有技术的短板,本发明提供了一种基于边界盒模型的BFOA-Fang高精度定位方 法,该方法基于物联网技术和室外定位技术,利用NB-IOT节点组网技术,探索感知层节点 的高精度定位方法,实现了对物联网感知层节点的高精度定位。
本发明采用如下技术方案来实现:
一种基于边界盒模型的BFOA-Fang高精度定位方法,包括如下步骤:
步骤1:建立边界盒模型:该定位方法采用三个通讯基站来完成,每个基站其通讯信号所 覆盖的圆形作外接正方形,构建出边界盒模型;
步骤2:采用Fang算法进行初步定位:利用TDOA原理和通讯基站的位置,完成对待求 解标签的初步定位;
步骤3:采用改进的果蝇算法进行高精度定位:步骤1缩小了果蝇算法的初始化区域, 步骤2提供了果蝇群体的初始化位置和味道浓度函数的构造参数,借助步骤1和步骤2,利 用果蝇算法进行高精度定位求解。
本发明进一步的改进在于,步骤1的具体实现方法如下:
101)以基站为中心,边长为2R作为新的通讯区域,构造出边界盒模型的覆盖区域,R 为基站的通讯半径;
102)假设待求解的标签位于边界盒模型覆盖范围内,定位的区域可用数学模型表示为:
[max(x
本发明进一步的改进在于,步骤2的具体实现方法如下:
201)假定待求目标的坐标为(x,y),三个基站的坐标为(x
202)取基站的数目为3,三个基站的坐标位置分别为:A(0,0)、B(0,300)、C(300,0),假设基站的信号覆盖范围为200m,定位标签的坐标为Q(150,150),利用Fang算法进行10次求解。
本发明进一步的改进在于,步骤3的具体实现方法如下:
301)利用公式
302)假设果蝇种群的规模为n,定义权重系数为:
303)利用误差函数
本发明的有益效果体现在:
本发明利用边界盒模型BFOA-Fang高精度定位算法对物联网设备的感知层节点进行高 精度定位,借助减速顶节点进行了算法验证,实现了对减速顶节点的高精度定位,为生产作 业中寻找故障节点奠定了基础,节约了人工作业,提高了生产效率。
该算法首先利用边界盒模型约束初始定位区域,并利用Fang算法计算出初始定位坐标, 显著提高了定位速度;然后采用果蝇算法计算精确的定位坐标,显著提高了定位精度。
附图说明
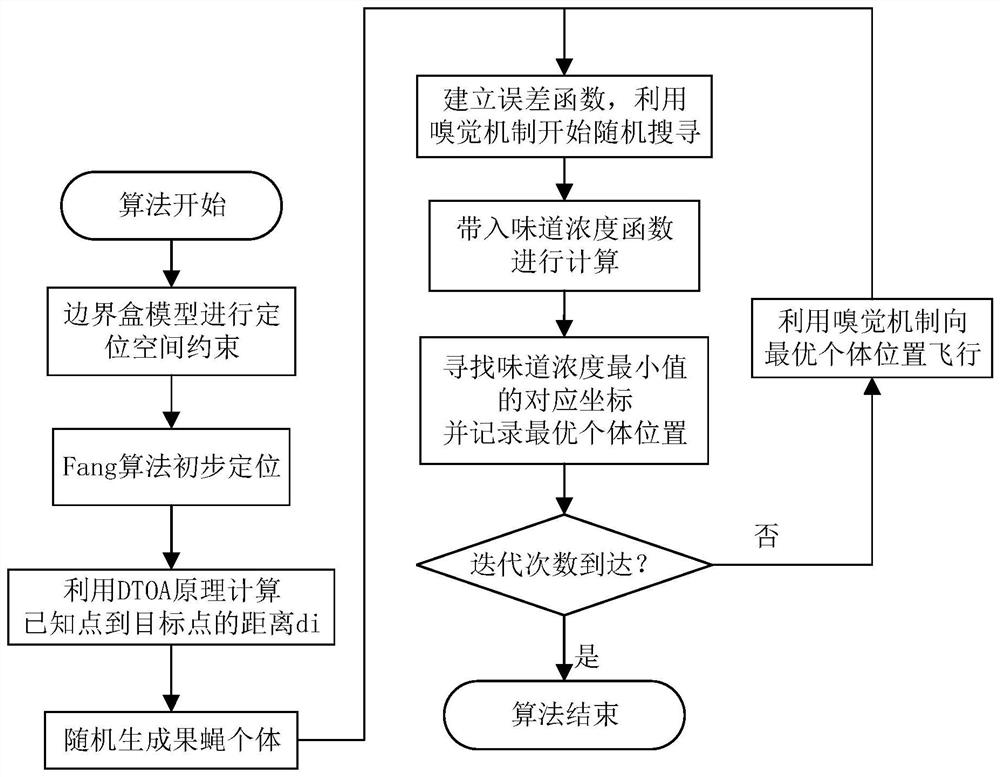
图1为本发明专利定位算法流程图;
图2为本发明的边界盒模型;
图3为本发明的Fang算法定位误差曲线图;
图4为本发明的果蝇算法种群迁移图。
具体实施方式
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图, 对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明 一部分的实施例,不是全部的实施例,而并非要限制本发明公开的范围。此外,在以下说明 中,省略了对公知结构和技术的描述,以避免不必要的混淆本发明公开的概念。基于本发明 中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例, 都应当属于本发明保护的范围。
在附图中示出了根据本发明公开实施例的各种示意图。这些图并非是按比例绘制的,其 中为了清楚表达的目的,放大了某些细节,并且可能省略了某些细节。图中所示出的各种区 域、层的形状及它们之间的相对大小、位置关系仅是示例性的,实际中可能由于制造公差或 技术限制而有所偏差,并且本领域技术人员根据实际所需可以另外设计具有不同形状、大小、 相对位置的区域/层。
下面结合附图和实施例进一步阐明本发明:
参考图1,为本发明专利定位算法流程图。边界盒模型的BFOA-Fang高精度定位算法总 共有三个关键步骤:边界盒模型对定位空间进行约束、Fang算法初步定位和果蝇算法(FOA) 优化定位精度。
参考图2,为本发明专利的边界盒模型。A、B、C三点为边界盒模型的基站位置,三个圆为基站的通讯距离示意,当ABC覆盖范围内有一待测目标时,能定位出目标的位置。为了提高定位速度,以基站为中心,边长为2R(R为基站的通讯半径)作为新的通讯区域。其中,A1-A2-A3-A4为基站A的覆盖范围,B1-B2-B3-B4为基站B的覆盖范围,C1-C2-C3-C4为基 站C的覆盖范围。
参考图3,为本发明的Fang算法定位误差曲线图。取基站的数目为3,三个基站的坐标 位置分别为:A(0,0)、B(0,300)、C(300,0),假设基站的信号覆盖范围为200m且存 在一定的干扰噪声,定位标签的坐标为Q(150,150)。利用Fang算法进行10次求解,可知其 定位误差在5~16m之内,具有较好的初步定位效果。
参考图4,果蝇算法种群迁移图。算法中将种群规模随机设定为25,迭代次数设定成30 次,通过果蝇算法求解,种群迁移后的中心位置坐标为(150.5,148.8),定位精度提高了18.4m。
本发明经过实验仿真和验证具有以下结果:边界盒模型的BFOA-Fang高精度定位方法具 有快速定位标签区域的作用,极大的降低定位速度,算法的最佳种群规模为20~25,最佳迭代 次数为8~10次,将参数设定为最佳后,定位平均误差控制在1-5m之内,具有较好的实际工 程应用价值。
- 一种基于边界盒模型的BFOA-Fang高精度定位方法
- 一种基于边界盒模型的BFOA-Fang高精度定位方法