一种土木建筑智能成型设备
文献发布时间:2023-06-19 10:30:40
技术领域
本发明涉及一种智能成型设备,更具体的说是一种土木建筑智能成型设备。
背景技术
进几年内国内都在大兴土木建设自己的家园,但是随着发展的进行也伴随着大量的建筑垃圾,为了尽可能的减少垃圾造成的污染和对能量的利用,让后对建筑垃圾进行特殊处理在进行压块处理,所以发明了一种土木建筑智能成型设备。
发明内容
本发明涉及一种土木建筑智能成型设备,更具体的说是一种土木建筑智能成型设备,通过给料装置持续的向上述提供需要加工的混合材料,动力传递装置提供设备工作时的动力,物料传送装置将需要成型的材料推到指定的位置,脱模装置和挤压成型装置将材料成型后并脱模等功能。
为解决上述技术问题,一种土木建筑智能成型设备,包括安装板、给料装置、动力传递装置、物料传送装置、脱模装置、挤压成型装置,通过给料装置持续的向上述提供需要加工的混合材料,动力传递装置提供设备工作时的动力,物料传送装置将需要成型的材料推到指定的位置,脱模装置和挤压成型装置将材料成型后并脱模等功能,其特征在于:给料装置安装固定在安装板上,动力传递装置安装固定在安装板上,物料传送装置安装固定在动力传递装置上,物料传送装置滑动安装在脱模装置上,脱模装置安装固定在安装板上,挤压成型装置安装固定在安装板上。
作为本技术方案的进一步优化,本发明一种土木建筑智能成型设备所述的给料装置包括支撑腿、出料嘴,支撑腿安装固定在安装板上,出料嘴安装固定在支撑腿上。
作为本技术方案的进一步优化,本发明一种土木建筑智能成型设备所述的动力传递装置包括安装架、滑动柱、滑动块、固定轴、安装杆、主动轴、输出带轮、推动滑动杆、传动皮带、安装座、传动轴、接收带轮、齿轮、安装座一、传动轴一、传动齿轮、齿轮一,滑动柱滑动安装在安装架上,滑动块滑动安装在滑动柱内部,固定轴安装固定在滑动块上,安装杆安装固定在安装板上,主动轴转动安装在安装杆上,输出带轮安装固定在主动轴上,推动滑动杆安装固定在主动轴上,传动皮带安装在输出带轮和接收带轮上,安装座安装固定在安装板上,传动轴转动安装在安装座上,接收带轮安装固定在传动轴上,齿轮安装固定在传动轴上,安装座一安装固定在滑动柱上,传动轴一转动安装在安装座一上,传动齿轮和齿轮啮合,传动齿轮安装固定在传动轴一上,齿轮一安装固定在传动轴一上。
作为本技术方案的进一步优化,本发明一种土木建筑智能成型设备所述的物料传送装置包括模具箱、挡板、连接杆、配合槽孔、固定杆、固定板、弹簧、移动齿条板、齿条顶板、连接板一、限位杆、弹簧一,模具箱安装固定在连接杆上,挡板安装固定在模具箱上,连接杆安装固定在滑动柱上,配合槽孔设置在模具箱上,固定杆安装固定在模具箱内部,固定板安装固定在固定杆上,弹簧设置在移动齿条板内部,移动齿条板滑动安装在固定板上,齿条顶板安装固定在连接板一上,连接板一滑动安装在限位杆上,限位杆安装固定在模具箱内部,弹簧一套装在,限位杆上。
作为本技术方案的进一步优化,本发明一种土木建筑智能成型设备所述脱模装置包括支撑板、配合槽板、限位孔、配合孔缸、弹簧二、滑动板二、连接方柱、托板、弹簧三、滑动板二、推动杆二、限位斜面块、配合斜面槽,支撑板安装固定在安装板上,配合槽板安装固定在支撑板上,限位孔设置在配合槽板上,配合孔缸安装固定在安装板上,弹簧二安装在配合孔缸内部,滑动板二滑动安装在配合孔缸内部,连接方柱安装固定在滑动板二上,托板安装固定在连接方柱上,弹簧三安装在托板内部,滑动板二滑动安装在托板内部,推动杆二安装固定在滑动板二上,限位斜面块安装固定在推动杆二上,配合斜面槽设置在限位斜面块上。
作为本技术方案的进一步优化,本发明一种土木建筑智能成型设备所述的挤压成型装置包括安装架二、传动轴二、带轮一传动皮带一、接收带轮、往复变向装置、输出齿轮、推动齿轮、固定滑块、滑动齿条、连接板二、推动杆二、传动齿桶、传动齿桶一、推动齿板一、连接板二、弹簧六、挤压板,安装架二安装固定在安装板上,传动轴二转动安装在安装架二上,带轮一安装固定在传动轴二上,传动皮带一安装在带轮一和接收带轮上,接收带轮安装固定在往复变向装置上,往复变向装置安装固定在安装板上,输出齿轮安装固定在往复变向装置上,输出齿轮和齿轮一啮合,推动齿轮安装固定在传动轴二上,固定滑块安装固定在安装架二上,滑动齿条滑动安装在固定滑块上,连接板二安装固定在滑动齿条上,推动杆二安装固定在连接板二上,传动齿桶转动安装在推动杆二内部,传动齿桶一转动安装在推动杆二内部,传动齿桶一分别于传动齿桶和推动齿板一啮合,推动齿板一固定在连接板二上,连接板二滑动安装在推动杆二内部,弹簧六安装固定在连接板二上和推动杆二内部,挤压板安装固定在滑动齿条上。
作为本技术方案的进一步优化,本发明一种土木建筑智能成型设备所述给料装置的出料嘴上端设有给料装置。
作为本技术方案的进一步优化,本发明一种土木建筑智能成型设备所述动力传递装置主动轴设有配套电机。
作为本技术方案的进一步优化,本发明一种土木建筑智能成型设备所述挤压成型装置的往复变向装置为市面上已经公布的课调控往复换向装置。
本发明一种土木建筑智能成型设备有益效果为:
本发明涉及一种土木建筑智能成型设备,更具体的说是一种土木建筑智能成型设备,实现了通过给料装置持续的向上述提供需要加工的混合材料,动力传递装置提供设备工作时的动力,物料传送装置将需要成型的材料推到指定的位置,脱模装置和挤压成型装置将材料成型后并脱模等功能。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
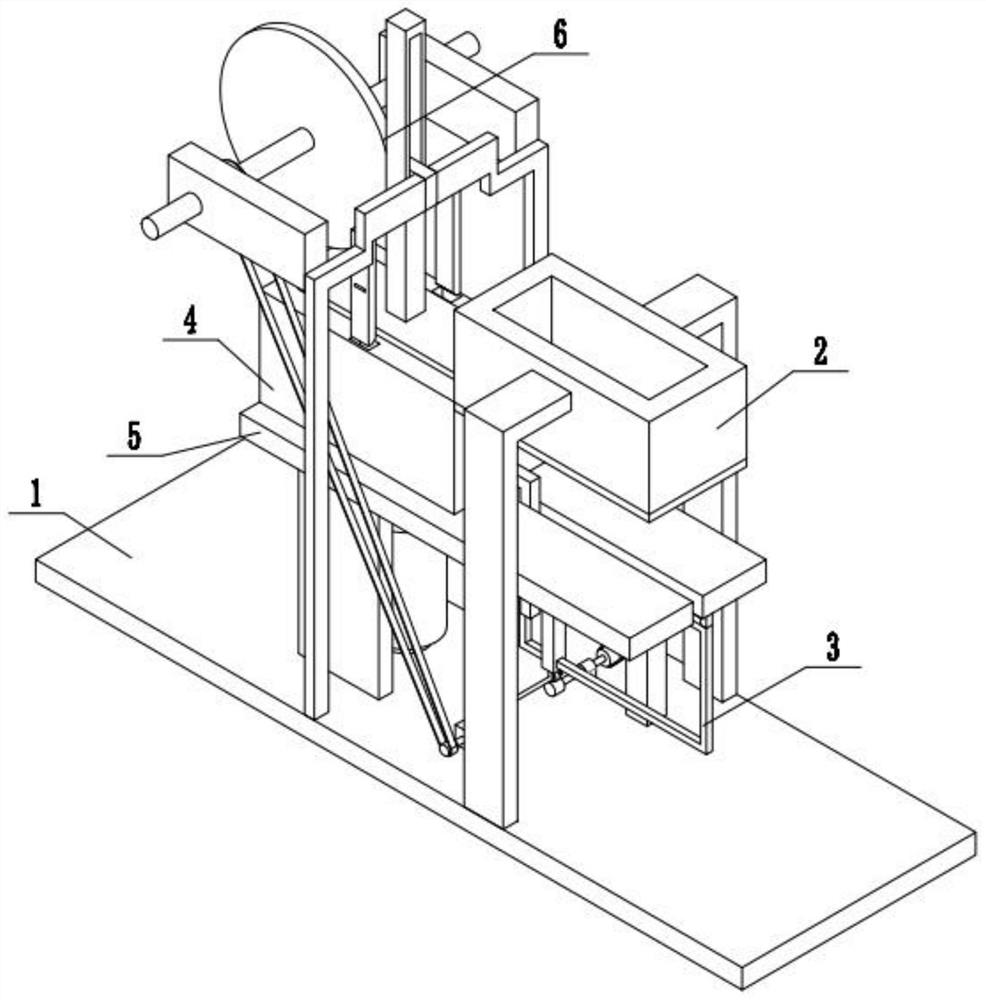
图1为本发明的整体结构示意图一。
图2为本发明的整体结构示意图二。
图3为本发明的整体结构示意图三。
图4为本发明的给料装置结构示意图一。
图5为本发明的给料装置结构示意图二。
图6为本发明的给料装置结构示意图三。
图7为本发明的动力传递装置结构示意图一。
图8为本发明的动力传递装置结构示意图二。
图9为本发明的动力传递装置结构示意图三。
图10为本发明的动力传递装置结构示意图四。
图11为本明的物料传送装置结构示意图一。
图12为本明的物料传送装置结构示意图二。
图13为本明的物料传送装置结构示意图三。
图14为本明的挤压成型装置结构示意图一。
图15为本明的挤压成型装置结构示意图二。
图16为本明的挤压成型装置结构示意图三。
图17为本明的挤压成型装置结构示意图四。
图中:安装板1;支撑腿2-1;出料嘴2-2;给料装置2;动力传递装置3;安装架3-1;滑动柱3-2;滑动块3-3;固定轴3-4;安装杆3-5;主动轴3-6;输出带轮3-7;推动滑动杆3-8;传动皮带3-9;安装座3-10;传动轴3-11;接收带轮3-12;齿轮3-13;安装座一3-14;传动轴一3-15;传动齿轮3-16;齿轮一3-17;物料传送装置4;模具箱4-1;挡板4-2;连接杆4-3;配合槽孔4-4;固定杆4-5;固定板4-6;弹簧4-7;移动齿条板4-8;齿条顶板4-9;连接板一4-10;限位杆4-11;弹簧一4-12;脱模装置5;支撑板5-1;配合槽板5-2;限位孔5-3;配合孔缸5-4;弹簧二5-5;滑动板二5-6;连接方柱5-7;托板5-8;弹簧三5-9;滑动板二5-10;推动杆二5-11;限位斜面块5-12;配合斜面槽5-13;挤压成型装置6;安装架二6-1;传动轴二6-2;带轮一6-3传动皮带一6-4;接收带轮6-5;往复变向装置6-6;输出齿轮6-7;推动齿轮6-8;固定滑块6-9;滑动齿条6-10;连接板二6-11;推动杆二6-12;传动齿桶6-13;传动齿桶一6-14;推动齿板一6-15;连接板二6-16;弹簧六6-17;挤压板6-18。
具体实施方式
具体实施方式一:
下面结合图1、2、3、4、5、6、7、8、9、10、11、12、13、14、15、16、17为解决上述技术问题,一种土木建筑智能成型设备,包括安装板1、给料装置2、动力传递装置3、物料传送装置4、脱模装置5、挤压成型装置6,通过给料装置持续的向上述提供需要加工的混合材料,动力传递装置提供设备工作时的动力,物料传送装置将需要成型的材料推到指定的位置,脱模装置和挤压成型装置将材料成型后并脱模等功能,其特征在于:给料装置2安装固定在安装板1上,动力传递装置3安装固定在安装板1上,物料传送装置4安装固定在动力传递装置3上,物料传送装置4滑动安装在脱模装置5上,脱模装置5安装固定在安装板1上,挤压成型装置6安装固定在安装板1上。
具体实施方式二:
下面结合图1、2、3、4、5、6、7、8、9、10、11、12、13、14、15、16、17说明本实施方式,本实施方式对实施方式一作进一步说明,所述的给料装置2包括支撑腿2-1、出料嘴2-2,支撑腿2-1安装固定在安装板1上,出料嘴2-2安装固定在支撑腿2-1上。
具体实施方式三:
下面结合图1、2、3、4、5、6、7、8、9、10、11、12、13、14、15、16、17说明本实施方式,本实施方式对实施方式一作进一步说明,所述的动力传递装置3包括安装架3-1、滑动柱3-2、滑动块3-3、固定轴3-4、安装杆3-5、主动轴3-6、输出带轮3-7、推动滑动杆3-8、传动皮带3-9、安装座3-10、传动轴3-11、接收带轮3-12、齿轮3-13、安装座一3-14、传动轴一3-15、传动齿轮3-16、齿轮一3-17,给料装置2的出料嘴2-2的上端设有给料的装置能够持续的通过出料嘴2-2排放需要加工的材料,当物料传送装置4的模具箱4-1位于出料嘴2-2的下方时,模具箱4-1接收混合的物料然后动力传递装置3的主动轴3-6带动输出带轮3-7和推动滑动杆3-8转动,输出带轮3-7通过传动皮带3-9带动接收带轮3-12转动,接收带轮3-12通过传动轴3-11带动齿轮3-13转动,推动滑动杆3-8通过个固定轴3-4配合,以及滑动块3-3能够在滑动柱3-2内部进行滑动使得滑动柱3-2会在安装架3-1上进行往复的移动并使得滑动柱3-2移动到安装架3-1的两端时做一个一端时间的停留,当模具箱4-1位于出料嘴2-2的下方时移动并使得滑动柱3-2就停留在安装架3-1的一端然后停留一端的时间使得模具箱4-1中能够添加充足的物料,然后滑动柱3-2带动模具箱4-1向前滑动将脱模装置5上成型的成品推掉,然后到达另一端停止,这时滑动柱3-2通过安装座一3-14带动传动轴一3-15和传动轴一3-15上的传动齿轮3-16和齿轮一3-17移动,使得传动齿轮3-16和齿轮3-13啮合,然后齿轮3-13带动齿轮3-13转动,通过传动轴一3-15带动齿轮一3-17转动,滑动柱3-2滑动安装在安装架3-1上,滑动块3-3滑动安装在滑动柱3-2内部,固定轴3-4安装固定在滑动块3-3上,安装杆3-5安装固定在安装板1上,主动轴3-6转动安装在安装杆3-5上,输出带轮3-7安装固定在主动轴3-6上,推动滑动杆3-8安装固定在主动轴3-6上,传动皮带3-9安装在输出带轮3-7和接收带轮3-12上,安装座3-10安装固定在安装板1上,传动轴3-11转动安装在安装座3-10上,接收带轮3-12安装固定在传动轴3-11上,齿轮3-13安装固定在传动轴3-11上,安装座一3-14安装固定在滑动柱3-2上,传动轴一3-15转动安装在安装座一3-14上,传动齿轮3-16和齿轮3-13啮合,传动齿轮3-16安装固定在传动轴一3-15上,齿轮一3-17安装固定在传动轴一3-15上。
具体实施方式四:
下面结合图1、2、3、4、5、6、7、8、9、10、11、12、13、14、15、16、17说明本实施方式,本实施方式对实施方式二作进一步说明,所述的物料传送装置4包括模具箱4-1、挡板4-2、连接杆4-3、配合槽孔4-4、固定杆4-5、固定板4-6、弹簧4-7、移动齿条板4-8、齿条顶板4-9、连接板一4-10、限位杆4-11、弹簧一4-12,然后伸出的推动齿板一6-15向下顶出齿条顶板4-9,齿条顶板4-9通过连接板一4-10将弹簧一4-12压缩,齿条顶板4-9继续先将脱模装置5的限位斜面块5-12在配合斜面槽5-13的作用下向托板5-8的中心处推动,,模具箱4-1安装固定在连接杆4-3上,挡板4-2安装固定在模具箱4-1上,连接杆4-3安装固定在滑动柱3-2上,配合槽孔4-4设置在模具箱4-1上,固定杆4-5安装固定在模具箱4-1内部,固定板4-6安装固定在固定杆4-5上,弹簧4-7设置在移动齿条板4-8内部,移动齿条板4-8滑动安装在固定板4-6上,齿条顶板4-9安装固定在连接板一4-10上,连接板一4-10滑动安装在限位杆4-11上,限位杆4-11安装固定在模具箱4-1内部,弹簧一4-12套装在,限位杆4-11上。
具体实施方式五:
下面结合图1、2、3、4、5、6、7、8、9、10、11、12、13、14、15、16、17说明本实施方式,本实施方式对实施方式一作进一步说明,所述脱模装置5包括支撑板5-1、配合槽板5-2、限位孔5-3、配合孔缸5-4、弹簧二5-5、滑动板二5-6、连接方柱5-7、托板5-8、弹簧三5-9、滑动板二5-10、推动杆二5-11、限位斜面块5-12、配合斜面槽5-13,然后使得限位斜面块5-12和限位孔5-3进行分离,然后顶出齿条顶板4-9继续向下推动托板5-8而且挤压板6-18和托板5-8不在有力作用在成型的物品上,托板5-8向下移动的过程中托板5-8通过连接方柱5-7在配合孔缸5-4内部推动滑动板二5-6并将弹簧二5-5压缩以及将配合孔缸5-4中的空气推出,当托板5-8推着成型的材料完全漏出模具箱4-1时并在向下移动一端的距离,然后挤压成型装置6的推动齿轮6-8在往复变向装置6-6作用下迅速的方向移动并快速的恢复到其实的状态后,这时动力传递装置3开始拉动模具箱4-1往回移动,齿轮3-13和传动齿轮3-16不在啮合,齿轮一3-17和输出齿轮6-7啮合,挤压成型装置6无动力输入停止工作,由于配合孔缸5-4的原因使得通过弹簧二5-5将滑动板二5-6、连接方柱5-7和托板5-8复位的速度要远小于其他装置的复位速度就会使得当,模具箱4-1移动出料嘴2-2下端一端时间后才复位,然后模具箱4-1再向挤压成型装置6下方移动重复上述的过程,支撑板5-1安装固定在安装板1上,配合槽板5-2安装固定在支撑板5-1上,限位孔5-3设置在配合槽板5-2上,配合孔缸5-4安装固定在安装板1上,弹簧二5-5安装在配合孔缸5-4内部,滑动板二5-6滑动安装在配合孔缸5-4内部,连接方柱5-7安装固定在滑动板二5-6上,托板5-8安装固定在连接方柱5-7上,弹簧三5-9安装在托板5-8内部,滑动板二5-10滑动安装在托板5-8内部,推动杆二5-11安装固定在滑动板二5-10上,限位斜面块5-12安装固定在推动杆二5-11上,配合斜面槽5-13设置在限位斜面块5-12上。
具体实施方式六:
下面结合图1、2、3、4、5、6、7、8、9、10、11、12、13、14、15、16、17说明本实施方式,本实施方式对实施方式一作进一步说明,所述的挤压成型装置6包括安装架二6-1、传动轴二6-2、带轮一6-3传动皮带一6-4、接收带轮6-5、往复变向装置6-6、输出齿轮6-7、推动齿轮6-8、固定滑块6-9、滑动齿条6-10、连接板二6-11、推动杆二6-12、传动齿桶6-13、传动齿桶一6-14、推动齿板一6-15、连接板二6-16、弹簧六6-17、挤压板6-18,齿轮一3-17带动挤压成型装置6的输出齿轮6-7转动,输出齿轮6-7通过往复变向装置6-6使得接收带轮6-5进行往复的转动,接收带轮6-5通过动皮带一6-4带动带轮一6-3往复的转动,带轮一6-3带动传动轴二6-2往复的转动,传动轴二6-2带动推动齿轮6-8往复的转动,当模具箱4-1位置刚到挤压板6-18下端时挤压成型装置6就刚开始运作,推动齿轮6-8使得滑动齿条6-10先向下移动,滑动齿条6-10带动连接板二6-11、推动杆二6-12、传动齿桶6-13、传动齿桶一6-14、推动齿板一6-15、连接板二6-16、弹簧六6-17和挤压板6-18向下移动,向下移动的挤压板6-18先将模具箱4-1内部的材料进行挤压,挤压到一定的距离后推动杆二6-12进入到配合槽孔4-4中将移动齿条板4-8向模具箱4-1内侧推动然后使得移动齿条板4-8和移动齿条板4-8分离同时传动齿桶6-13和配合槽孔4-4内壁进行啮合,随着推动杆二6-12和挤压板6-18向下移动,传动齿桶6-13通过传动齿桶一6-14带动推动齿板一6-15快速向下移动然后将弹簧六6-17压缩,使得推动杆二6-12加上推动齿板一6-15的行程远大于挤压板6-18的行程,安装架二6-1安装固定在安装板1上,传动轴二6-2转动安装在安装架二6-1上,带轮一6-3安装固定在传动轴二6-2上,传动皮带一6-4安装在带轮一6-3和接收带轮6-5上,接收带轮6-5安装固定在往复变向装置6-6上,往复变向装置6-6安装固定在安装板1上,输出齿轮6-7安装固定在往复变向装置6-6上,输出齿轮6-7和齿轮一3-17啮合,推动齿轮6-8安装固定在传动轴二6-2上,固定滑块6-9安装固定在安装架二6-1上,滑动齿条6-10滑动安装在固定滑块6-9上,连接板二6-11安装固定在滑动齿条6-10上,推动杆二6-12安装固定在连接板二6-11上,传动齿桶6-13转动安装在推动杆二6-12内部,传动齿桶一6-14转动安装在推动杆二6-12内部,传动齿桶一6-14分别于传动齿桶6-13和推动齿板一6-15啮合,推动齿板一6-15固定在连接板二6-16上,连接板二6-16滑动安装在推动杆二6-12内部,弹簧六6-17安装固定在连接板二6-16上和推动杆二6-12内部,挤压板6-18安装固定在滑动齿条6-10上。
具体实施方式七:
下面结合图1、2、3、4、5、6、7、8、9、10、11、12、13、14、15、16、17说明本实施方式,本实施方式对实施方式二作进一步说明,所述给料装置2的出料嘴2-2上端设有给料装置。
具体实施方式八:
下面结合图1、2、3、4、5、6、7、8、9、10、11、12、13、14、15、16、17说明本实施方式,本实施方式对实施方式二作进一步说明,所述动力传递装置3主动轴3-6设有配套电机。
具体实施方式九:
下面结合图1、2、3、4、5、6、7、8、9、10、11、12、13、14、15、16、17说明本实施方式,本实施方式对实施方式二作进一步说明,所述挤压成型装置6的往复变向装置6-6为市面上已经公布的课调控往复换向装置。
本发明的工作原理是:
一种土木建筑智能成型设备的工作原理是,在使用前先检查好装置间的连接情况是否符合要求,首先给料装置2的出料嘴2-2的上端设有给料的装置能够持续的通过出料嘴2-2排放需要加工的材料,当物料传送装置4的模具箱4-1位于出料嘴2-2的下方时,模具箱4-1接收混合的物料然后动力传递装置3的主动轴3-6带动输出带轮3-7和推动滑动杆3-8转动,输出带轮3-7通过传动皮带3-9带动接收带轮3-12转动,接收带轮3-12通过传动轴3-11带动齿轮3-13转动,推动滑动杆3-8通过个固定轴3-4配合,以及滑动块3-3能够在滑动柱3-2内部进行滑动使得滑动柱3-2会在安装架3-1上进行往复的移动并使得滑动柱3-2移动到安装架3-1的两端时做一个一端时间的停留,当模具箱4-1位于出料嘴2-2的下方时移动并使得滑动柱3-2就停留在安装架3-1的一端然后停留一端的时间使得模具箱4-1中能够添加充足的物料,然后滑动柱3-2带动模具箱4-1向前滑动将脱模装置5上成型的成品推掉,然后到达另一端停止,这时滑动柱3-2通过安装座一3-14带动传动轴一3-15和传动轴一3-15上的传动齿轮3-16和齿轮一3-17移动,使得传动齿轮3-16和齿轮3-13啮合,然后齿轮3-13带动齿轮3-13转动,通过传动轴一3-15带动齿轮一3-17转动,齿轮一3-17带动挤压成型装置6的输出齿轮6-7转动,输出齿轮6-7通过往复变向装置6-6使得接收带轮6-5进行往复的转动,接收带轮6-5通过动皮带一6-4带动带轮一6-3往复的转动,带轮一6-3带动传动轴二6-2往复的转动,传动轴二6-2带动推动齿轮6-8往复的转动,当模具箱4-1位置刚到挤压板6-18下端时挤压成型装置6就刚开始运作,推动齿轮6-8使得滑动齿条6-10先向下移动,滑动齿条6-10带动连接板二6-11、推动杆二6-12、传动齿桶6-13、传动齿桶一6-14、推动齿板一6-15、连接板二6-16、弹簧六6-17和挤压板6-18向下移动,向下移动的挤压板6-18先将模具箱4-1内部的材料进行挤压,当挤压到一定的距离后推动杆二6-12进入到配合槽孔4-4中将移动齿条板4-8向模具箱4-1内侧推动然后使得移动齿条板4-8和移动齿条板4-8分离同时传动齿桶6-13和配合槽孔4-4内壁进行啮合,随着推动杆二6-12和挤压板6-18向下移动,传动齿桶6-13通过传动齿桶一6-14带动推动齿板一6-15快速向下移动然后将弹簧六6-17压缩,使得推动杆二6-12加上推动齿板一6-15的行程远大于挤压板6-18的行程,然后伸出的推动齿板一6-15向下顶出齿条顶板4-9,齿条顶板4-9通过连接板一4-10将弹簧一4-12压缩,齿条顶板4-9继续先将脱模装置5的限位斜面块5-12在配合斜面槽5-13的作用下向托板5-8的中心处推动,然后使得限位斜面块5-12和限位孔5-3进行分离,然后顶出齿条顶板4-9继续向下推动托板5-8而且挤压板6-18和托板5-8不在有力作用在成型的物品上,托板5-8向下移动的过程中托板5-8通过连接方柱5-7在配合孔缸5-4内部推动滑动板二5-6并将弹簧二5-5压缩以及将配合孔缸5-4中的空气推出,当托板5-8推着成型的材料完全漏出模具箱4-1时并在向下移动一端的距离,然后挤压成型装置6的推动齿轮6-8在往复变向装置6-6作用下迅速的方向移动并快速的恢复到其实的状态后,这时动力传递装置3开始拉动模具箱4-1往回移动,齿轮3-13和传动齿轮3-16不在啮合,齿轮一3-17和输出齿轮6-7啮合,挤压成型装置6无动力输入停止工作,由于配合孔缸5-4的原因使得通过弹簧二5-5将滑动板二5-6、连接方柱5-7和托板5-8复位的速度要远小于其他装置的复位速度就会使得当,模具箱4-1移动出料嘴2-2下端一端时间后才复位,然后模具箱4-1再向挤压成型装置6下方移动重复上述的过程。
当然,上述说明并非对本发明的限制,本发明也不仅限于述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 一种土木建筑智能成型设备
- 一种土木建筑施工用混凝土智能输送机