一种无人船的分布式队列有限时间控制方法
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及无人船编队领域,尤其涉及一种无人船的分布式队列有限时间控制方法。
背景技术
当无人船编队系统从宽广海域行驶至狭窄海域时,需要进行队形的切换,这时不仅要考虑对领航者的跟踪性能,还要保证领航者和跟随者之间的编队误差不能过大。队形切换过程中,当两船之间的距离过大时,将会超出传感器的通信范围,导致通信失败的问题或者碰撞航道;当两船之间的距离过小时,将会小于船舶之间的安全距离,容易产生船体之间碰撞的危险。而目前针对无人船编队控制,大部分只考虑了编队系统最终能否达到期望的队形,没有考虑编队误差的约束问题。预设性能函数和障碍李雅普诺夫函数可以有效解决控制过程中的误差约束问题,并且已经用于船舶路径跟踪控制、机器人控制和无人机控制。有学者使用预设性能函数,通过坐标转换把视距法的距离和角度误差约束在期望的范围内,解决了全驱动无人水面船排式编队过程中的暂态性能约束问题,但是控制器设计繁琐。对于船舶控制中输出约束的研究,对数型障碍李雅普诺夫函数是研究的热点,将其应用于全驱动无人船的轨迹跟踪控制,解决了对称输出约束的问题;目前大多数关于船舶运动控制输出约束的研究都是单一系统的约束控制,对船舶编队控制的输出约束研究成果依然较少。
对于船舶有限时间控制的研究依旧大都集中在单船的控制研究上。早期有学者研究了模型参数摄动和恒定未知洋流下欠驱动无人水下航行器的轨迹跟踪控制问题。采用比例积分微分滑模控制的等效控制方法设计了运动学控制器。再次,利用一阶滑模面和二阶滑模面分别设计了两个动态控制器,保证所有跟踪误差在有限时间内全局收敛。随后的研究针对输入饱和和未知干扰,采用积分滑模控制和齐次扰动观测器对无人船的有限时间轨迹跟踪控制进行了研究,使用光滑函数自适应逼近输入饱和非线性,通过构造齐次扰动观测器,可以在较短的时间内准确地估计总的不确定性。理论分析表明,整个闭环跟踪系统是全局有限时间稳定的,仿真研究证明了该方法的有效性和优越性。近期基于二阶快速终端滑模研究了在模型不确定性和外部干扰下的全驱动船水下航行器轨迹跟踪,所设计的二阶滑模面能够实现快速收敛且避免奇异值的出现。Elmokadem考虑了欠驱动水下航行器在非线性动态、未建模动态、系统不确定性和外部环境干扰下的横向运动控制,使用终端滑模控制和快速终端滑模控制两种方法实现了轨迹跟踪控制,虽然能够保证系统在有限时间内收敛,但是会出现奇异值的问题;为了减弱环境干扰和模型不确定性带来的影响,需要已知它们的上界值,这在实际中是很难得到的。除此之外,上述控制器的设计都是针对单船,由于编队控制系统的复杂性,大部分针对单体系统的控制方法无法直接应用于多体系统的研究。
发明内容
根据现有技术存在的问题,本发明公开了一种无人船的分布式队列有限时间控制方法,包括以下步骤:
建立无人船编队运动学和动力学模型;
基于无人船编队运动学和动力学模型,采用视线法的策略来定义无人船编队之间的相对位置和角度,利用障碍李亚普诺夫函数设计满足领航无人船和跟随无人船之间的最小避碰距离和最大有效通讯距离约束条件;
在运动学和动力学模型的基础上,得到无人船编队的领航无人船和跟随无人船之间的相对位置和角度,在满足领航者和跟随者无人船之间的最小避碰距离和最大有效通讯距离约束条件下,根据期望的位置和艏向信息得到的误差信息设计虚拟控制律;
基于动力学模型中的不确定项,采用径向基神经网络设计补偿反馈控制;
针对动力学模型中的未知海洋环境干扰进行估计,设计扰动干扰观测器;
基于虚拟控制律、神经网络自适应控制、扰动观测器,及全状态反馈的全驱动无人船进行输出约束编队控制器,实现无人船的分布式队列有限时间控制。
进一步地,对海洋环境扰动进行估计,设计扰动观测器的表达式如下:
其中:M
进一步地,所述输出约束编队控制器的表达式如下:
其中
由于采用了上述技术方案,本发明提供的一种无人船的分布式队列有限时间控制方法,对于全驱动无人船编队系统,采用障碍李雅普诺夫函数确保领导者和跟随者处于安全距离并在通讯连接范围内,然后对于存在速度不可测、模型不确定性和外部干扰多重约束的条件下,使用径向基函数神经网络逼近模型不确定性,基于前文设计的干扰观测器对外部环境干扰进行估计,提出多重约束下的全状态反馈鲁棒有限时间编队控制器,通过稳定性证明了全驱动无人船的编队状态误差在有限时间均能收敛到零附近的任意小邻域内。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
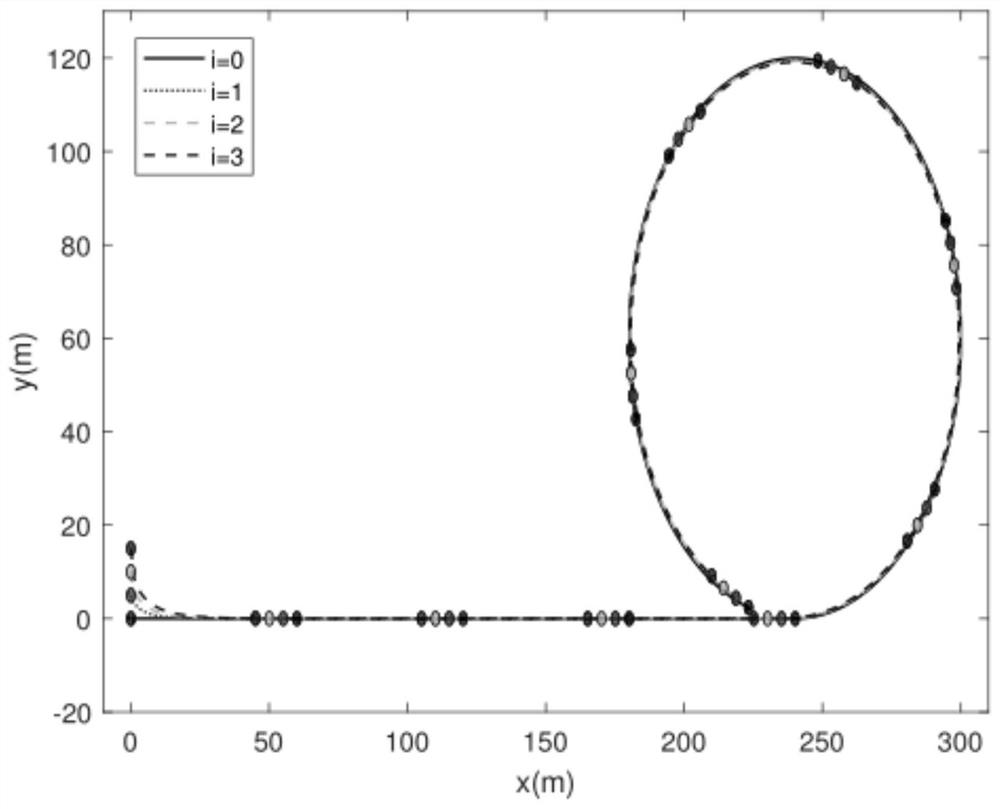
图1北东地坐标系下的编队曲线图;
图2各艘船的速度曲线图;
图3各艘船的控制输入曲线图;
图4编队距离误差曲线图;
图5编队角度误差曲线图;
图6环境干扰观测误差值图。
具体实施方式
为使本发明的技术方案和优点更加清楚,下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚完整的描述:
一种无人船的分布式队列有限时间控制方法,包括以下步骤:
S1:建立无人船编队运动学和动力学模型;
S2:基于无人船编队运动学和动力学模型,采用视线法的策略来定义无人船编队之间的相对位置和角度,利用障碍李亚普诺夫函数设计满足领航无人船和跟随无人船之间的最小避碰距离和最大有效通讯距离约束条件;
S3:在运动学和动力学模型的基础上,得到无人船编队的领航无人船和跟随无人船之间的相对位置和角度,在满足领航者和跟随者无人船之间的最小避碰距离和最大有效通讯距离约束条件下,根据期望的位置和艏向信息得到的误差信息设计虚拟控制律;
S4:基于动力学模型中的不确定项,采用径向基神经网络设计补偿反馈控制;
S5:针对动力学模型中的未知环境干扰,设计扰动观测器对海洋环境扰动进行估计;
S6:基于虚拟控制律、神经网络自适应控制、扰动观测器,及全状态反馈的全驱动无人船输出约束编队控制器,实现无人船的分布式队列式有限时间控制。
上述步骤S3、步骤S4、步骤S5也可以并列执行;
进一步地,建立无人船编队运动学和动力学模型的过程如下:
考虑到包含N+1个无人船的编队系统(编号为0,1,…N),第i个全驱动无人水面船的运动学模型可以表示为:
动力学模型可以表示为:
其中,η
进一步地,在运动学和动力学模型的基础上,基于视线法的策略来定义无人船编队之间的相对位置和角度;
领航无人船和跟随无人船之间的相对距离ρ
相对角度
考虑到避碰和通信距离约束,定义编队误差为:
其中:e
在整个队列运动过程中需严格满足如下条件(最小避碰距离和最大有效通讯距离约束条件指):
其中:,
定义位置向量和速度向量的跟踪误差如下
z
z
其中:z
进一步地,根据无人船期望的位置和艏向信息设计虚拟控制律α
其中:α
进一步地,基于径向基神经网络逼近不确定项,设计补偿反馈控制;
由于阻尼矩阵R
W
使用函数
神经网络自适应更新律设计为:
其中,
对状态误差两边求微分可以得到:
其中D
针对动力学模型中的未知环境干扰,设计扰动观测器估计海洋环境扰动;
其中:M
进一步地,设计基于全状态反馈的全驱动无人船自适应神经网络输出约束编队控制器为:
其中
进一步地,考虑如下李雅普诺夫函数对系统设计的稳定性进行证明:
其中,
李雅普诺夫函数V
其中:κ
适当调整κ
通过仿真验证所提的全驱动无人船自适应神经网络输出约束编队控制方法的有效性;将领航者的轨迹设置为如下形式:
每艘船的初始状态信息如下:η
图1北东地坐标系下的编队曲线图;图2各艘船的速度曲线图;图3各艘船的控制输入曲线图;图4编队距离误差曲线图;图5编队角度误差曲线图;距离误差和角度误差都能够最终收敛至零附近的较小邻域内,且在整个编队过程中,误差始终处于约束范围之内。图显示各艘船之间的距离大于最小避碰距离,小于最大通信距离,证明了所用障碍李雅普诺夫函数技术的有效性;另外,跟随者1的误差明显小于其他跟随者,这是因为跟随者1能够直接从领航者获取信息,跟随者2和跟随者3需要经过更多的传输链才能得到信息,导致误差更高,编队误差最终仍收敛至原点的小范围内;图6环境干扰观测误差值图,显示了干扰观测器对外部时变环境干扰值的观测误差,经过初始过程的调整,观测误差值也能够收敛至原点附近的小邻域内,证明了所提出观测器的有效性。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种无人船的分布式队列有限时间控制方法
- 一种基于有限时间不确定观测器的多无人船编队固定时间控制方法