一种射击机器人
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及机器人领域。
背景技术
随着人类对自然界探索脚步地不断加快,人类对于机器人的要求不仅仅是能够在平坦的地面上使用,还要求机器人在崎岖地区也能具备一定的运动能力,因此,六足机器人在这种需求下诞生,六足机器人相对于传统的轮式机器人而言,得益于其独特的机械结构和灵活的运动方式,使其能够在崎岖地面也具备出色的运动能力。但是,目前大多数被设计出来的六足机器人只有机器人本体,不具备防御和攻击的能力。针对上述存在的问题,研究设计一种新型的带有射击功能的机器人,克服现有机器人中所存在的问题是十分必要的。
发明内容
为了解决现有的机器人存在的上述问题,本发明提供了一种射击机器人。
本发明为实现上述目的所采用的技术方案是:一种射击机器人,包括移动装置、射击装置、云台机构和控制系统,所述射击装置通过所述云台机构与所述移动装置连接,所述射击装置包括供弹机构和射击机构,所述射击机构包括发射轨道、枪管、电机和两个摩擦轮,所述发射轨道的一端与所述供弹机构的出弹口连接,所述发射轨道的另一端与所述枪管连接,所述发射轨道位于两个摩擦轮之间且两个摩擦轮之间的距离小于弹丸的直径,所述电机用于驱动两个摩擦轮旋转并挤压发射弹丸,所述控制系统用于控制所述移动装置、射击装置和云台机构。
优选的,所述发射轨道包括上侧板和下侧板,所述上侧板与所述下侧板之间的的距离与所述弹丸的直径相同。
优选的,所述摩擦轮外缘包覆橡胶层,所述摩擦轮顶部设有摩擦轮盖板,所述摩擦轮与所述电机的输出轴通过所述摩擦轮盖板连接。
优选的,所述供弹机构包括供弹舵机、推杆、推块、弹丸输送管、供弹支架和储弹仓,所述供弹舵机、推杆和推块设在所述供弹支架上,所述供弹舵机上端输出轴与所述推杆的一端连接,所述推杆的另一端与所述推块连接,所述推块设有与弹丸对应的开口,所述弹丸输送管的上端与所述开口下方对应,所述弹丸输送管的另一端与所述发射轨道连接,所述储弹仓的下端与所述开口的上方对应。
优选的,所述云台机构包括第一云台舵机、第二云台舵机和云台支架,所述第一云台舵机竖直布置,其下端与所述移动装置连接,其上端输出轴与所述第二云台舵机连接,所述第二云台舵机水平布置,其输出轴与所述云台支架连接,所述射击装置与所述云台支架连接。
优选的,所述移动装置包括机器人底座和腿部结构,所述机器人底座包括上底板和下底板,所述上底板和所述下底板通过六个基节结构连接,所述基节结构包括基节舵机(3-1)和基节支架,所述基节舵机设在所述基节支架内部,所述腿部结构为六个,六个腿部结构分别与六个基节舵机对应连接。
优选的,所述上底板和下底板均为正六边形结构,所述正六边形的六条边处均设有弧形凹槽,所述正六边形的六角位置设有弧形凸起,所述基节支架连接在所述弧形凸起处。
优选的,所述腿部结构包括大腿和小腿,所述大腿通过第一舵机与所述基节舵机连接,所述第一舵机用于控制所述大腿运动,所述小腿通过第二舵机与所述大腿连接,所述第二舵机用于控制所述小腿运动。
优选的,所述控制系统包括蓝牙模块、控制模块、驱动模块和能源模块,所述蓝牙模块与所述控制模块连接,用于将接收到的控制信号传递给所述控制模块;所述控制模块与所述驱动模块连接,用于向所述驱动模块传递位置控制信号、速度控制信号或转矩控制信号;所述驱动模块分别连接并驱动所述移动装置、射击装置和云台机构;所述能源模块分别与所述蓝牙模块、控制模块、驱动模块、移动装置、射击装置和云台机构连接,用于提供能量。
优选的,所述驱动模块包括位置驱动模块、速度驱动模块和转矩驱动模块,所述位置驱动模块、速度驱动模块和转矩驱动模块分别与所述移动装置、射击装置和云台机构连接,分别用于驱动所述移动装置、射击装置和云台机构运动;所述能源模块包括外接电源,所述外接电源采用锂电池对所述移动装置、射击装置和云台机构进行供电。
本发明的一种射击机器人,通过六足的设计使机器人在崎岖地形下仍然具有优良的运动性能和稳定性能,通过加装射击机构,使机器人具有攻击和防御能力,可以边移动边进行射击,同时机器人的零件简单,零件通用性强,容易制造加工且维修成本低,机器人控制系统程序编写简单,易实现用移动设备进行机器人控制。
附图说明
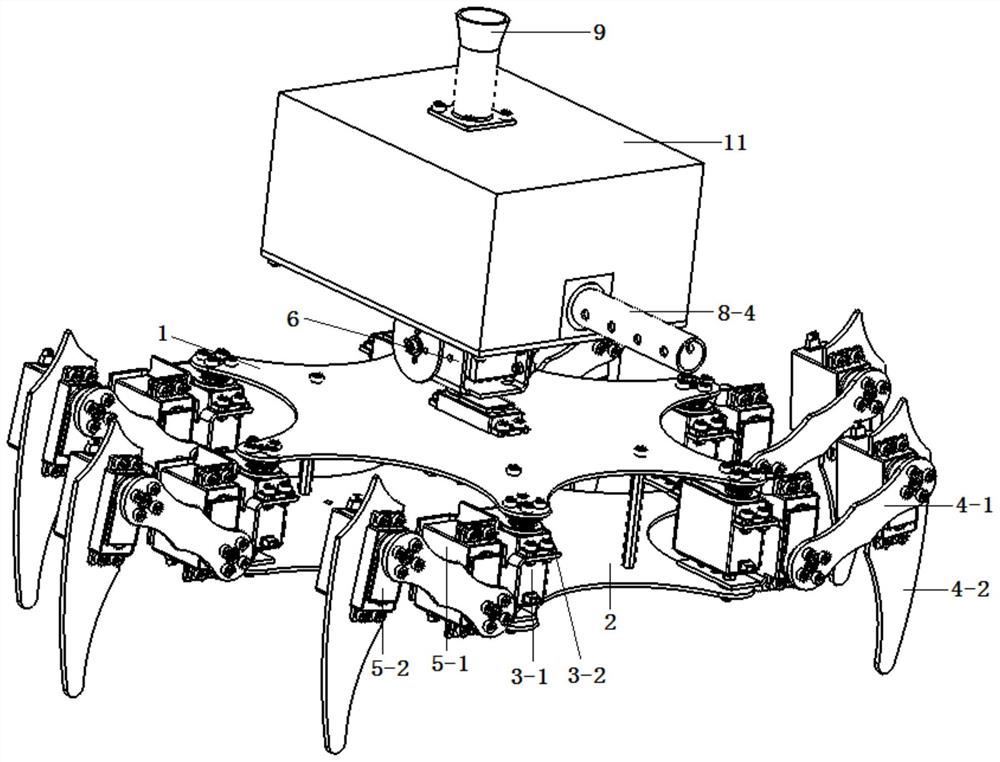
图1是本发明实施例的立体结构示意图;
图2是本发明实施例的射击机构结构示意图;
图3是本发明实施例的摩擦轮结构示意图;
图4是本发明实施例的射击过程示意图;
图5是本发明实施例的供弹机构结构示意图;
图6是本发明实施例的储弹仓结构示意图;
图7是本发明实施例的云台结构示意图;
图8是本发明实施例的底座部分结构示意图;
图9是本发明实施例的上底板结构示意图;
图10是本发明实施例的下底板结构示意图;
图11是本发明实施例的舵机支架结构示意图;
图12是本发明实施例的大腿结构示意图;
图13是本发明实施例的小腿结构示意图;
图14是本发明实施例的控制系统流程框图;
图15是本发明实施例的舵机输入信号脉冲宽度与输出轴转角对应关系示意图。
图中:1、上底板,2、下底板,3-1、基节舵机,3-2、基节支架,4-1、大腿,4-2、小腿,5-1、第一舵机,5-2、第二舵机,6、云台机构,6-1、第一云台舵机,6-2、第二云台舵机,6-3、云台支架,7、供弹机构,7-1、供弹舵机,7-2、推杆,7-3、推块,7-4、开口,7-5、弹丸输送管,7-6、供弹支架,8、射击机构,8-1、摩擦轮,8-2、橡胶层,8-3、摩擦轮盖板,8-4、枪管,8-5、发射轨道,9、储弹仓,10、弹丸,11、外壳。
具体实施方式
下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
在本发明的描述中,需要说明的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。此外,在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
本发明的一种射击机器人如图1所示,包括移动装置、射击装置、云台机构6和控制系统,射击装置通过云台机构6与移动装置连接,射击装置外部可以设置外壳11,使机器人更加美观,射击装置包括供弹机构7和射击机构8,如图2所示,射击机构8包括发射轨道8-5、枪管8-4、电机和两个摩擦轮8-1,发射轨道8-5的一端与供弹机构7的出弹口连接,发射轨道8-5的另一端与枪管8-4连接,发射轨道8-5位于两个摩擦轮8-1之间而且两个摩擦轮8-1之间的距离略小于弹丸10的直径,发射轨道8-5包括上侧板和下侧板,上侧板与下侧板之间的的距离可以与弹丸10的直径相同,且上侧板与下侧板与弹丸10的接触面可以为与弹丸形状相对应的弧形凹面,这样可以防止弹丸在发射轨道8-5内上下晃动。电机用于驱动两个摩擦轮8-1旋转并挤压发射弹丸10,电机可以为一个电机通过齿轮连接带动两个摩擦轮8-1旋转;也可以为两个型号为精灵32312A外转子无刷直流电机,两个电机的输出轴分别与两个摩擦轮8-1连接并带动其旋转,两电机的转速大小相等,方向相反。如图3所述,摩擦轮8-1外缘包覆有橡胶层8-2,摩擦轮8-1的顶部设有摩擦轮盖板8-3,摩擦轮8-1与电机的输出轴通过摩擦轮盖板8-3连接。如图4所示,弹丸10可以为直径为15mm、重量为2.47g的塑料球、材料为PET树脂、密度为1.40g/cm
如图5所示,供弹机构7包括供弹舵机7-1、推杆7-2、推块7-3、弹丸输送管7-5、供弹支架7-6和储弹仓9,供弹舵机7-1、推杆7-2和推块7-3设在供弹支架7-6上,供弹舵机7-1上端输出轴与推杆7-2的一端连接,为推杆7-2提供动力,推杆7-2的另一端与推块7-3连接,推块7-3设有与弹丸10对应的开口7-4,弹丸输送管7-5的上端与开口7-4下方对应,弹丸输送管7-5的另一端与发射轨道8-5连接。供弹舵机7-1、推杆7-2和推块7-3构成一个曲柄滑块机构,供弹舵机7-1通过带动推杆7-2使得推块7-3做往复的直线运动,当推块7-3向前运动时,推块7-3推动弹丸10通过开口7-4落入弹丸输送管7-5,在落入弹丸输送管7-5后,弹丸10由于重力作用将会运动到发射轨道8-5,并且受到摩擦轮8-1的摩擦力和压力的作用后被高速射出。储弹仓9的下端与开口7-4的上方对应,如图6所示,弹丸10可以被竖直放置在储弹仓9中,当最底部的弹丸10被推块7-3推入至弹丸输送管7-5中后,推块7-3开始后退到开始的位置,这时新弹丸10将会从储弹仓9中落下,等待下一次启动,这样设计供弹仓9的优点是使得射击装置在接收射击命令后只有一颗弹丸10被射出,而不会一次命令导致多个弹丸10被射出。
如图7所示,云台机构6包括第一云台舵机6-1、第二云台舵机6-2和云台支架6-3,第一云台舵机6-1竖直布置,第一云台舵机6-1的下端与移动装置连接,其上端输出轴与第二云台舵机6-2连接,第二云台舵机6-2水平布置,其输出轴与云台支架6-3连接,射击装置与云台支架6-3连接,云台机构6可以实现射击装置的水平旋转运动和俯仰运动。
如图8所示,移动装置包括机器人底座和腿部结构,所述机器人底座包括上底板1和下底板2,上底板1和下底板2通过六个基节结构连接,基节结构包括基节舵机3-1和基节支架3-2,基节舵机3-1设在基节支架3-2的内部,腿部结构为六个,六个腿部结构分别与六个基节舵机3-1互相对应连接。如图9和图10所示,上底板1和下底板2可以设为正六边形结构,正六边形的六条边处均设有弧形凹槽,正六边形的六角位置均设有弧形凸起,基节支架3-2连接在弧形凸起处,此设计除了可以增加腿部结构的活动范围,还可以减轻机器人整体质量,提高机器人的能量使用效率。上底板1和下底板2的材料均可以使用7050-T7651铝合金,密度为2.83g/cm
如图11-13所示,腿部结构包括大腿4-1和小腿4-2,大腿4-1通过第一舵机5-1与基节舵机3-1连接,第一舵机5-1用于控制大腿4-1运动,小腿4-2通过第二舵机5-2与大腿4-1连接,第二舵机5-2用于控制小腿4-2运动。大腿4-1材料可以采用7050-T7651铝合金,大腿4-1的重量可以为14.46g,关节中心之间的距离可以为70mm;小腿4-2材料可以使用7050-T7651铝合金,小腿4-2的重量可以为21.72g,足端和关节中心之间的距离可以为105.5mm。
通过在SolidWorks中指定机器人零部件材料,并且计算驱动部分的质量,最终得出机器人本体的质量优选为2.1kg,所选的舵机达到最大扭矩时,机器人实际重量小于整体重量的最大值,机器人的最大高度优选为413.5mm,最大长度优选为685.29mm,最大宽度优选为648.31mm。
控制系统包括蓝牙模块、控制模块、驱动模块和能源模块,蓝牙模块与控制模块连接,用于将接收到的控制信号传递给控制模块;控制模块与驱动模块连接,用于向驱动模块传递位置控制信号、速度控制信号或转矩控制信号;驱动模块包括位置驱动模块、速度驱动模块和转矩驱动模块,位置驱动模块、速度驱动模块和转矩驱动模块分别与移动装置、射击装置和云台机构6连接,分别用于驱动移动装置、射击装置和云台机构6运动。控制系统的设计是机器人运动的组成之一,优秀的控制系统能提高机器人的灵活性,此外,考虑到后续会有设计人员对机器人进行二次开发,所以需要尽可能降低学习和使用成本,因此需要机器人具有编程简单、操作简易的特点。
如图14所示,本发明的机器人具有21个自由度,所以其控制系统较为复杂,本实施例的机器人的控制系统是可以是Arduino mega 2560,当连接好电路并且通过Arduino IDE将程序下载到Arduino控制板后,手机与Arduino mega 2560控制板通过中间的蓝牙模块建立通讯,蓝牙模块可以为HC-05。Arduino mega 2560控制板接收手机发出指令后,按照所接收指令去驱动相应的舵机或无刷直流电机来完成想要的功能。本实施例的舵机均可以采用型号为MG996R的舵机,舵机是一种具备闭环控制系统的位置伺服驱动器,由小型直流电机、控制电路板、可调电位器、变速齿轮组以及其他部件共同组成,在舵机的工作过程中,舵机的内部由基准电路产生一个宽度为1.5ms,周期为20ms的基准信号。此基准信号在有外部输入信号时会与其进行比较,以此来得出舵机的转动角度和转动方向,在舵机工作过程中,输入信号脉冲宽度与输出轴转角之间的对应关系如图15所示。
能源模块分别与蓝牙模块、控制模块、驱动模块、移动装置、射击装置和云台机构6连接,用于提供能量,能源模块包括外接电源,外接电源采用锂电池对移动装置、射击装置和云台机构6进行供电,可以采用锂电池作为外接电源进行供电,电池额定电压为3.7V,容量为1800mAh,尺寸为68×34×9mm,质量为45g。
本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。