一种共轴式可变径自行走炮管清洗装置
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及自动清洗装置领域,具体是一种共轴式可变径自行走炮管清洗装置。
背景技术
火炮在发射后会在身管内残留大量的物质,这些物质受高温、高压的与管壁黏贴非常牢固极不易清除,会导致身管内壁的腐蚀,进而影响炮的准确性、可靠性并影响身管的使用寿命。这些残留物主要依靠人工和机械的方法清除,设备笨重、智能化程度低,士兵劳动强度大,效率低,且清不高,不能满足和适应现代化高科技战争的作战要求。
目前传统的炮管清洗方式有拉杆式清洗机床和人工推拉杆毛刷清洗,前者是通过电机和连杆机构带动拉杆实现往复直线运动,拉杆与炮管等长,拉杆上安装了清洁用的毛刷,该设备实现了火炮身管擦洗的自动化工作,但必须将炮管从坦克上拆下运至修复厂才能使用,设备占地面积大、重量大,移动不便,无法在部队营地和野外使用。而人工推拉杆毛刷清洗是通过数名战士推拉通条来进行炮膛擦洗工作,不仅耗费人力,效率低,且清洁程度不高,不能满足和适应现代化高科技战争的作战要求。
即便市场涌现出大量小型化自动清洗装置,但其结构设计任存在如下弊端,其一结构设计较固化,不具备变径扩张功能,因此无法满足不同规格管径自动化清洗;其二,清洗机搭载的清洗毛刷都采用单头毛刷,无法避免单轴回转运动而产生反扭力问题;其三,不具备自爬行功能,依然沿用钢丝拉拽的牵引模式。
有技术缺点如下,其一结构设计较固化,不具备变径扩张功能,因此无法满足不同规格管径自动化清洗;其二,清洗机搭载的清洗毛刷都采用单头毛刷,无法避免单轴回转运动而产生反扭力问题;其三,不具备自爬行功能,依然沿用钢丝拉拽的牵引模式。
1.方式研究:在国内外现有炮管清洗装备的基础上,结合炮管结构特征等参数,实现炮管清洗设备从可变径扩张功能可适应不同管口直径炮管;采用共轴式正反转毛刷设计消除单轴毛刷反扭力;实现可自主爬行功能取消钢丝绳拉拽模式;分别从这三个方向开展清洗设备技术研究,提升炮管清洗机通用化程度、设备自身运行的稳定性、清洗效率。
2.实物研制:以坦克部队现役主战坦克为研制对象,实现105-130管径自动化清洗机结构设计,具备以下三种功能:1可变径扩张功能,自适应不同规格管径炮管;2采用共轴式正反转毛刷设计,抵消单轴毛刷自身回转与机身产生的方扭力;3实现可自主爬行功能取消钢丝绳拉拽模式;通过实物研制,论证共轴式可变径自行走炮管清洗机方案的可行性。
3.拓展优化:首台样机研制成功后,根据实际使用效果和相应的技术改进和优化,对火炮炮管、鱼雷发射管、高射炮炮管展开通用化、小型化、系列化设计,实现共轴式可变径自行走炮管清洗机的普及应用,提高陆军火炮兵种部队外场快速保障能力。
发明内容
为了解决上述问题,本发明提出一种共轴式可变径自行走炮管清洗装置。
一种共轴式可变径自行走炮管清洗装置,包括机身、设置在机身上的共轴支撑架、与机身端部配合的1#毛刷、2#毛刷,还包括:
共轴正反转驱动模块,与1#毛刷、2#毛刷插装连接且通过共轴支撑架与机身串行连接,用于实现1#毛刷、2#毛刷反向等速回转运动;
自行走爬行模块,采用销轴和螺栓通过共轴支撑架与机身固定安装,通过齿轮间的啮合运动形成回转运动,从而实现清洗装置沿管壁攀爬运动;
变径扩张支撑模块,采用销轴和螺栓通过共轴支撑架与机身固定安装,通过类似伞撑结构传动设计实现驱动轮系的扩张和变径运动。
所述的共轴正反转驱动模块包括攀爬及清洗共用步进减速电机、与攀爬及清洗共用步进减速电机连接带动同步转动的输出轴、采用共轴套装与输出轴连接的伞齿轮输出轴、采用平键与输出轴连接的伞齿轮、与伞齿轮啮合实现输出轴反向等速回转运动的换向伞齿轮。
所述的攀爬及清洗共用步进减速电机在上电后进行回转运动,连带输出轴同步回转,其中伞齿轮输出轴在换向伞齿轮变换传动下能够实现与输出轴的反向等速回转运动。
所述的自行走爬行模块包括驱动轮、与输出轴啮合进行回转运动的蜗轮、与蜗轮共轴叠装并采用销钉进行周向固定的直齿轮一、与驱动轮共轴叠装并采用销钉进行周向固定的直齿轮二,所述的直齿轮一与直齿轮二通过短连杆固定并啮合连接。
所述的变径扩张支撑模块包括变径步进减速电机、与变径步进减速电机配合的传动螺杆、与传动螺杆套装旋合安装并且能够沿传动螺杆左右移动的调节螺母、与调节螺母铰接的斜撑杆、与斜撑杆铰接的平行连杆。
所述的平行连杆与机身采用平行四边形连杆机构连接,所述的斜撑杆一端连接平行连杆,另一端连接调节螺母;所述的调节螺母在移动过程中能够带动平行连杆沿机身径向进行扩张运动。
本发明的有益效果是:本发明通过调节螺母沿传动螺杆左右移动,调节螺母在移动过程中带动平行连杆沿机身径向扩张运动;通过类似伞撑结构传动设计实现驱动轮系的扩张和变径运动,实现炮管清洗设备可变径扩张功能,可适应不同管口直径炮管;采用共轴式正反转毛刷设计,伞齿轮输出轴在换向伞齿轮变换传动下能够实现与输出轴的反向等速回转运动用于消除单轴毛刷反扭力,取消传统的钢丝绳拉拽模式,具备可自主爬行功能,通过结构优化设计提升炮管清洗机通用化程度、操作便捷,可单兵作战使用、运行稳定、清洗效率高。
附图说明
下面结合附图和实施例对本发明进一步说明。
图1为本发明的立体结构示意图;
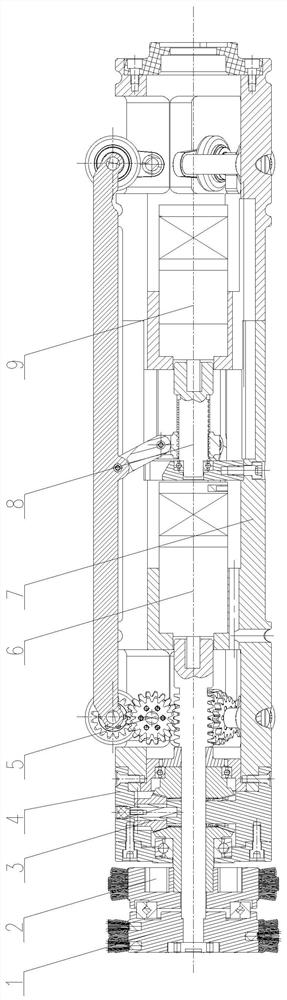
图2为本发明的剖视结构示意图;
图3为本发明的共轴正反转驱动模块结构示意图;
图4为本发明的自行走爬行模块结构示意图;
图5为本发明的变径扩张支撑模块结构示意图;
图6为本发明的图1的局部结构示意图;
图7为本发明的图2的局部结构示意图。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面对本发明进一步阐述。
如图1至图7所示,一种共轴式可变径自行走炮管清洗装置,包括机身7、设置在机身7上的共轴支撑架4、与机身7端部配合的1#毛刷1、2#毛刷2,还包括:
共轴正反转驱动模块3,与1#毛刷1、2#毛刷2插装连接且通过共轴支撑架4与机身7串行连接,用于实现1#毛刷1、2#毛刷2反向等速回转运动;
自行走爬行模块5,采用销轴和螺栓通过共轴支撑架4与机身7固定安装,通过齿轮间的啮合运动形成回转运动,从而实现清洗装置沿管壁攀爬运动;
变径扩张支撑模块8,采用销轴和螺栓通过共轴支撑架4与机身7固定安装,通过类似伞撑结构传动设计实现驱动轮系的扩张和变径运动。
所述的1#毛刷1、2#毛刷2在共轴正反转驱动模块3变换下实现同步等速回转运动。
所述的共轴正反转驱动模块3包括攀爬及清洗共用步进减速电机6、与攀爬及清洗共用步进减速电机6连接带动同步转动的输出轴1-1、采用共轴套装与输出轴1-1连接的伞齿轮输出轴1-2、采用平键与输出轴1-1连接的伞齿轮1-3、与伞齿轮1-3啮合实现输出轴1-1反向等速回转运动的换向伞齿轮1-4。
采用共轴式正反转毛刷设计,伞齿轮输出轴1-2在换向伞齿轮1-4变换传动下能够实现与输出轴1-1的反向等速回转运动用于消除单轴毛刷反扭力,取消传统的钢丝绳拉拽模式,具备可自主爬行功能,通过结构优化设计提升炮管清洗机通用化程度、操作便捷,可单兵作战使用、运行稳定、清洗效率高。
所述的伞齿轮输出轴1-2、伞齿轮1-3、换向伞齿轮1-4按图示要求啮合装配;输出轴1-1与伞齿轮1-3采用平键连接;输出轴1-1与攀爬及清洗共用步进减速电机6连接。
所述的攀爬及清洗共用步进减速电机6在上电后进行回转运动,连带输出轴1-1同步回转,其中伞齿轮输出轴1-2在换向伞齿轮1-4变换传动下能够实现与输出轴1-1的反向等速回转运动。
所述的自行走爬行模块5包括驱动轮5-3、与输出轴1-1啮合进行回转运动的蜗轮5-1、与蜗轮5-1共轴叠装并采用销钉进行周向固定的直齿轮一5-2、与驱动轮5-3共轴叠装并采用销钉进行周向固定的直齿轮二5-4,所述的直齿轮一5-2与直齿轮二5-4通过短连杆5-5固定并啮合连接。
所述的驱动轮(5-4和炮管管壁有效贴合。
通过短连杆5-5固定将直齿轮5-2直齿轮5-4啮合连接;输出轴1-1在回转过程中可驱动蜗轮5-1回转运动,并可通过直齿轮一5-2直齿轮二5-4啮合运动驱动驱动轮5-3回转运动,从而实现清洗装置沿管壁攀爬运动。
所述的变径扩张支撑模块8包括变径步进减速电机9、与变径步进减速电机9配合的传动螺杆8-4、与传动螺杆8-4套装旋合安装并且能够沿传动螺杆8-4左右移动的调节螺母8-3、与调节螺母8-3铰接的斜撑杆8-2、与斜撑杆8-2铰接的平行连杆8-1。
在变径步进减速电机9的驱动下,调节螺母8-3可沿传动螺杆8-4左右移动,调节螺母8-3在移动过程中可带动平行连杆8-1沿机身径向,即图示上下方向进行扩张运动;通过类似伞撑结构传动设计实现驱动轮系的扩张和变径运动。
本发明通过调节螺母8-3沿传动螺杆8-4左右移动,调节螺母8-3在移动过程中带动平行连杆8-1沿机身径向扩张运动;通过类似伞撑结构传动设计实现驱动轮系的扩张和变径运动,实现炮管清洗设备可变径扩张功能,可适应不同管口直径炮管。
所述的平行连杆8-1与机身7采用平行四边形连杆机构连接,所述的斜撑杆8-2一端连接平行连杆8-1,另一端连接调节螺母8-3;所述的调节螺母8-3在移动过程中能够带动平行连杆8-1沿机身7径向进行扩张运动。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。