一种群组机器人靶机对抗系统及方法
文献发布时间:2023-06-19 13:29:16
技术领域
本发明涉及智能靶场技术领域,具体涉及一种群组机器人靶机对抗系统及方法。
背景技术
我国士兵射击训练项目是训练士兵战斗力的重要措施之一。在士兵进行射击训练时,通常需要设有用于射击的靶机,士兵通过训练用枪对靶机进行射击完成训练。而目前的靶标大都只能被射击,而无法对被训的士兵形成对抗性训练,进而无法使被训的士兵体会战场上敌我双方的战斗境况,导致被训士兵的训练效果不是很理想。
发明内容
本发明提出一种群组机器人靶机对抗系统及方法,通过中央控制端制定对抗方案,并将对抗方案下发至多个机器人靶机执行对抗动作,多台机器人靶机协同作战,信息共享,真实模拟对抗性场景,使得射击训练更具有挑战性和效果。
为实现上述目的,本发明采用以下技术方案:
一种群组机器人靶机对抗系统,包括中央控制端、无线通信模块及若干机器人靶机,所述中央控制端用于制定对抗方案,所述中央控制端和机器人靶机通过所述无线通信模块双向电连接,所述机器人靶机包括方案接收模块、环境数据采集模块、数据传输模块、数据处理模块、执行模块及机器人对抗靶,所述方案接收模块用于接收所述中央控制端下发的方案并发送至数据处理模块,所述环境数据采集模块用于采集周围环境数据并通过所述数据传输模块上传至所述数据处理模块,所述数据处理模块通过所述执行模块下发执行动作给所述机器人对抗靶,所述机器人对抗靶与所述中央控制端连接。
优选地,所述中央控制端包括方案制定模块、分析模块、靶机数据采集模块、决策模块及执行下发模块,所述方案制定模块用于制定对抗方案并发送至所述方案接收模块和分析模块,所述靶机数据采集模块用于采集所述机器人对抗靶的状态数据并发送至所述分析模块,所述分析模块对对抗方案和状态数据进行分析后发送至所述决策模块,所述决策模块做出靶机执行命令决策后通过所述执行下发模块发送至所述数据处理模块。
优选地,所述机器人对抗靶包括机器人和包设在所述机器人表面的导电标靶层,所述导电标靶层上设有激光传感器,所述导电标靶层和激光传感器均与所述靶机数据采集模块连接。
优选地,所述机器人对抗靶还包括激光发射武器。
优选地,所述数据采集模块包括人体热释红外传感器、超声波传感器、压力传感器、震动传感器、速度传感器及温度传感器。
一种群组机器人靶机对抗方法,包括以下步骤:
S1、中央控制端制定并下发对抗方案;
S2、机器人靶机接收对抗方案并采集环境数据;
S3、中央控制端采集机器人靶机的状态数据,并结合对抗方案下发执行命令决策;
S4、机器人靶机接收执行命令决策,并根据对抗方案和环境数据执行动作。
优选地,步骤S1具体为:通过方案制定模块制定对抗方案,并发送至方案接收模块和分析模块。
优选地,步骤S2具体包括:
S21、方案接收模块接收对抗方案并发送至数据处理模块;
S22、环境数据采集模块采集环境数据,并通过数据传输模块上传至数据处理模块;
优选地,步骤S3具体包括:
S31、靶机数据采集模块采集所述机器人对抗靶的状态数据,并发送至分析模块;
S32、分析模块对对抗方案和状态数据进行分析后,并将分析数据发送至决策模块;
S33、决策模块做出靶机执行命令决策,并通过执行下发模块发送至数据处理模块。
优选地,步骤S4具体包括为:数据处理模块接收执行命令决策,根据对抗方案和环境数据匹配执行动作,并下发执行模块驱动机器人对抗靶执行动作。
采用上述技术方案后,本发明与背景技术相比,具有如下优点:
1、本发明提供一种群组机器人靶机对抗系统及方法,通过中央控制端制定对抗方案,并将对抗方案下发至多个机器人靶机执行对抗动作,多台机器人靶机协同作战,信息共享,真实模拟对抗性场景,使得射击训练更具有挑战性和效果。
2、本发明提供一种群组机器人靶机对抗系统及方法,机器人对抗靶表面设有电标靶层和激光传感器用于感应中弹信号,中央控制端采集对抗靶的中弹信号并分析中弹位置,根据对抗方案实时调整机器人对抗靶的执行动作,真实模拟靶场对抗中弹伤亡场景。
3、本发明提供一种群组机器人靶机对抗系统及方法,机器人靶机实时采集环境信息,并根据环境信息做出执行动作调整,提高机器人靶机的对抗性和智能化,使得射击训练更具有挑战性和效果。
附图说明
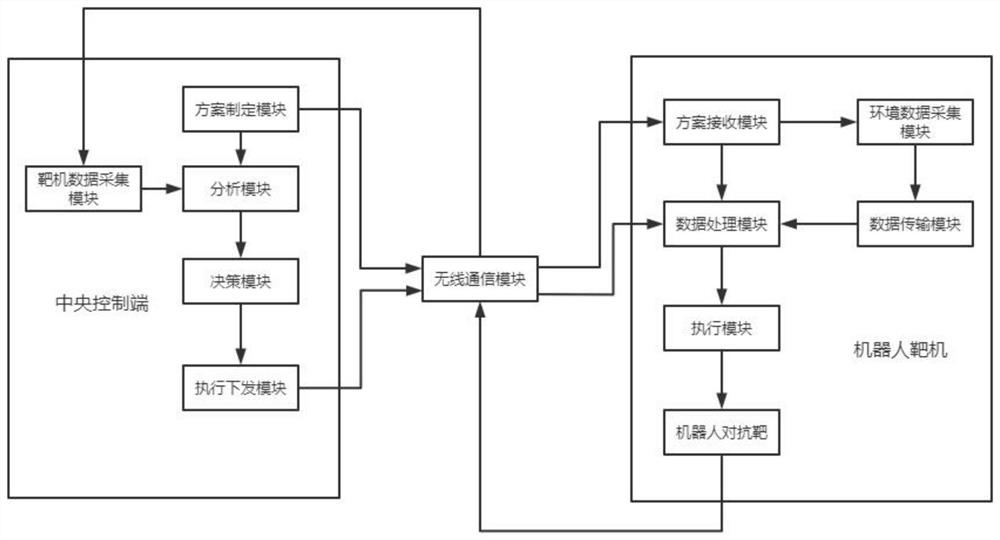
图1为本发明系统结构框图;
图2为本发明方法步骤流程示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
在本发明中需要说明的是,术语“上”“下”“左”“右”“竖直”“水平”“内”“外”等均为基于附图所示的方位或位置关系,仅仅是为了便于描述本发明和简化描述,而不是指示或暗示本发明的装置或元件必须具有特定的方位,因此不能理解为对本发明的限制。
实施例
参考图1所示,本发明公开了一种群组机器人靶机对抗系统,包括中央控制端、无线通信模块及若干机器人靶机,中央控制端用于制定对抗方案,中央控制端和机器人靶机通过无线通信模块双向电连接,机器人靶机包括方案接收模块、环境数据采集模块、数据传输模块、数据处理模块、执行模块及机器人对抗靶,方案接收模块用于接收中央控制端下发的方案并发送至数据处理模块,环境数据采集模块用于采集周围环境数据并通过数据传输模块上传至数据处理模块,数据处理模块通过执行模块下发执行动作给机器人对抗靶,机器人对抗靶与中央控制端连接。
中央控制端包括方案制定模块、分析模块、靶机数据采集模块、决策模块及执行下发模块,方案制定模块用于制定对抗方案并发送至方案接收模块和分析模块,靶机数据采集模块用于采集机器人对抗靶的状态数据并发送至分析模块,分析模块对对抗方案和状态数据进行分析后发送至决策模块,决策模块做出靶机执行命令决策后通过执行下发模块发送至数据处理模块。
机器人对抗靶包括机器人和包设在机器人表面的导电标靶层,导电标靶层上设有激光传感器,导电标靶层和激光传感器均与靶机数据采集模块连接。
机器人对抗靶还包括激光发射武器用于反向攻击。
数据采集模块包括人体热释红外传感器、超声波传感器、压力传感器、震动传感器、速度传感器及温度传感器。
参考图2所示,一种群组机器人靶机对抗方法,包括以下步骤:
S1、中央控制端制定并下发对抗方案;
S2、机器人靶机接收对抗方案并采集环境数据;
S3、中央控制端采集机器人靶机的状态数据,并结合对抗方案下发执行命令决策;
S4、机器人靶机接收执行命令决策,并根据对抗方案和环境数据执行动作。
步骤S1具体为:通过方案制定模块制定对抗方案,并发送至方案接收模块和分析模块。
步骤S2具体包括:
S21、方案接收模块接收对抗方案并发送至数据处理模块;
S22、环境数据采集模块采集环境数据,并通过数据传输模块上传至数据处理模块;
步骤S3具体包括:
S31、靶机数据采集模块采集机器人对抗靶的状态数据,并发送至分析模块;
S32、分析模块对对抗方案和状态数据进行分析后,并将分析数据发送至决策模块;
S33、决策模块做出靶机执行命令决策,并通过执行下发模块发送至数据处理模块。
步骤S4具体包括为:数据处理模块接收执行命令决策,根据对抗方案和环境数据匹配执行动作,并下发执行模块驱动机器人对抗靶执行动作。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。