一种单车集成的近程防空导弹武器系统
文献发布时间:2023-06-19 18:29:06
技术领域
本发明属于机械电子工程领域,涉及近程防空导弹武器系统结构设计,具体涉及一种单车集成的近程防空导弹武器系统。
背景技术
近程防空导弹武器系统是本单位根据外贸市场需求,提出研制的一种近程末端防御武器系统。目前,中东、非洲、东南亚和南亚地区的大多国家仅具备有限的防空能力,其防空系统大多基于高炮防空系统,难以有效地应对新特点的空袭作战形式,面临的防空压力不断增大,需要将其原有的基于高炮防空系统升级为更高效的导弹防空系统,各国采购导弹防空系统的需求旺盛,并将长期存在。根据市场的反馈,确立了武器系统的研发方向。即发展10-20km增程型防空导弹武器系统。
武器系统主要用于完成要地防空、伴随防空任务,与其它防空武器系统协同,构成区域防空系统,保障地面部队和战役区域内重要目标的空中安全。为了满足上述要求,需要选择高机动、高防护能力的底盘并将整个武器系统进行集成设计,如何进行有效集成是武器系统设计的关键技术。
发明内容
要解决的技术问题
本发明提供一种单车集成的近程防空导弹武器系统,需要解决的技术问题:如何将两组四联装箱弹组合、搜索雷达、跟踪雷达、光电跟踪仪、伺服系统、液压系统、升降及倒伏机构等进行合理集成,保证火力资源和探测资源不遮挡、整车可通过公路及铁路运输、整车的布局尽量紧凑、便于设备操作等。
技术方案
一种单车集成的近程防空导弹武器系统,其特征在于采用单车集成技术思路,在8X8轮式装甲底盘上单车集成近程防空导弹武器系统,包括8X8轮式装甲底盘、两组四联装箱弹组合、搜索雷达、跟踪雷达、光电跟踪仪、伺服系统、液压系统、升降及倒伏机构、尾焰防护装置、电站、主控台;其中两组四联装箱弹组合、搜索雷达、跟踪雷达、光电跟踪仪、伺服系统、液压系统、升降及倒伏机构、尾焰防护装置集成于转塔上,转塔安装在底盘装甲顶面三桥上方位置,底盘左后部上方安装电站、底盘后部中间位置安装主控台;
整个转塔方位方向可360°旋转,采用双电机消隙驱动;两组四联装箱弹组合分别安装于转塔两侧的发射架上,发射架在俯仰方向采用液压缸驱动,定角40°发射;跟踪雷达、光电跟踪仪、搜索雷达安装于炮塔中部,三个设备从前往后排列,跟踪雷达阵面后倾30°固定安装,光电跟踪仪及搜索雷达采用升降及倒伏机构进行工作状态与运输状态的姿态转换;伺服系统除了完成转塔方位伺服外,还包括搜索雷达的方位伺服,光电跟踪仪的方位及俯仰伺服;液压系统的液压泵、控制阀组、油箱集中安装于转塔后部,发射架的俯仰推动缸、光电跟踪仪的倒伏液压缸、搜索雷达的升降及倒伏液压缸则分别安装于各个被驱动设备的对应位置。
本发明进一步的技术方案:所述的发射架采用L形结构,后部单转轴悬挂支撑;在发射架侧面中部安装弧形导轨的滑块,该滑块可在转台上安装的弧形导轨的导轨上滑动。
本发明进一步的技术方案:所述的电站嵌于底盘的左后方上部的位置,实现电站与底盘的一体化设计。
本发明进一步的技术方案:所述的升降及倒伏机构包括2个水平滑轨、滑动件、2个水平联接轴、联动件、2个升降液压缸、2个竖直滑轨、2个竖直联接轴、升降平台,所述的水平滑轨的导轨固定于转台上,水平滑轨的滑块与滑动件固连,水平联接轴固定于联动件上,同时与滑动件有轴孔配合关系,联动件与竖直联接轴有轴孔配合关系;竖直联接轴固定于升降平台上,升降平台则通过升降液压缸的液压杆及竖直滑轨的内筒固定,升降液压缸的套筒及竖直滑轨的外筒固定于转台上。
本发明进一步的技术方案:所述的尾焰防护装置包括左尾焰防护装置和右尾焰防护装置,所述的左尾焰防护装置和右尾焰防护装置成镜像对称分别固定于转台的两侧,都由安装底板、20个V型挡板、7个支撑板焊接而成,V型挡板前边向下倾斜30°,后边向上倾斜10°。
本发明进一步的技术方案:所述的主控台由两个基本相同的机柜并排放置,主副显示器上下安装,主显示器位于上方,竖直安装,副显示器位于下方,与水平方向成40°夹角安装,控制键盘安装于台面上,与水平方向夹角为10.5°。
有益效果
本发明提供的一种单车集成的近程防空导弹武器系统,具有高机动、高防护、单车集成、布局紧凑等优点,可有效完成要地防空、伴随防空任务。
1、转塔高度集成,通过合理的布局及机构设计,保证各系统之间不干涉、不遮蔽,整个系统可方便的移植于其它底盘上。
2、为了降低装备高度,发射架采用L形结构,后部单转轴悬挂支撑,为了提高稳定性,在发射架侧面中部安装弧形导轨的滑块,该滑块可在转台上安装的弧形导轨的导轨上滑动,以满足发射架的俯仰运动稳定性。
3、为了满足搜索雷达在工作状态及运输状态下的不同姿态要求,提出了一种新型升降及倒伏的联动机构,该机构的升降及倒伏动作并联完成,可大大减少姿态转换的时间,机构形式简单、可靠性高、成本低。
4、为了在有效的空间内解决导弹的尾焰防护问题,设计了一种栅格式尾焰防护装置,可对导弹尾焰进行有效导流,防止尾焰对车顶其它设备的烧蚀。
5、充分利用了装甲车的有限空间,将电站与底盘进行了一体化设计,把电站嵌于底盘的左后方上部的位置,有效的利用了装甲底盘的有效空间。
6、根据装甲车的高度空间,设计了一种新型的主控台,其高度为1.27米,主副显示器上下安装,很好的解决了相关人机工程问题。
附图说明
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
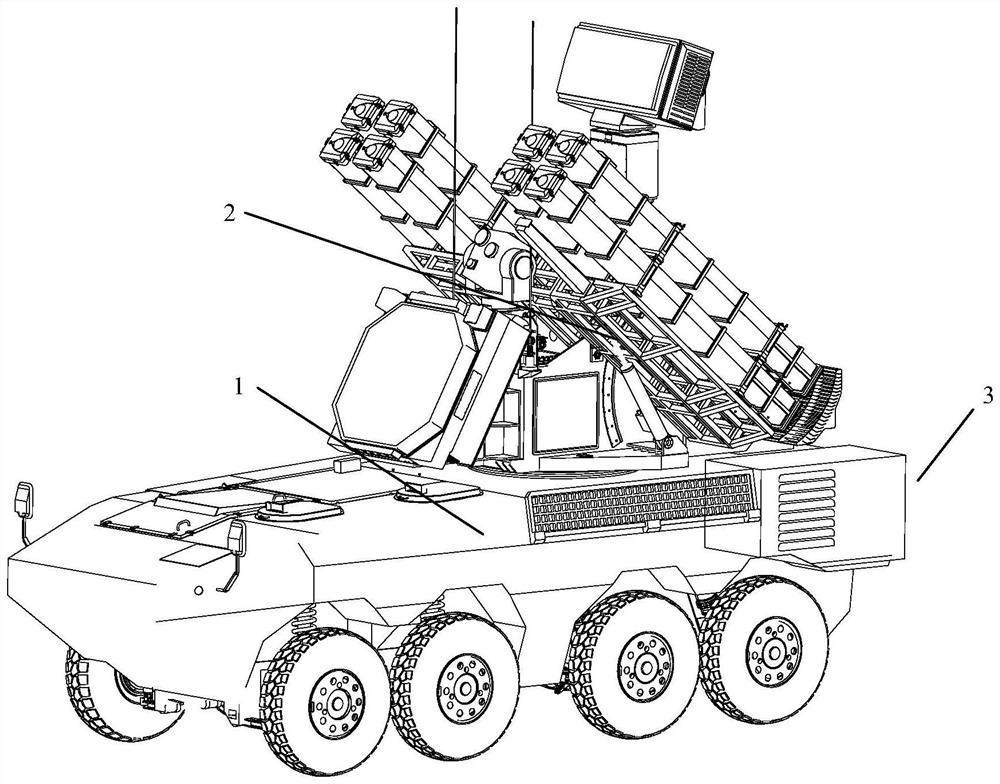
图1为本发明的整车组成示意图;
图2为本发明的主控台安装示意图;
图3为本发明的转塔前侧向示意图;
图4为本发明的转塔后侧向示意图;
图5为本发明的搜索雷达升降与倒伏联动机构示意图;
图6为本发明的弧形导轨示意图;
图7为本发明的直线导轨示意图;
图8为本发明的尾焰防护装置示意图;
图9为本发明的主控台示意图;
图10为本发明的尾焰导流照片。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
一种单车集成的近程防空导弹武器系统,采用单车集成技术思路,在8X8轮式装甲底盘上单车集成近程防空导弹武器系统,包括8X8轮式装甲底盘、两组四联装箱弹组合、搜索雷达、跟踪雷达、光电跟踪仪、伺服系统、液压系统、升降及倒伏机构、尾焰防护装置、电站、主控台等。其中两组四联装箱弹组合、搜索雷达、跟踪雷达、光电跟踪仪、伺服系统、液压系统、升降及倒伏机构、尾焰防护装置等集成于转塔上,转塔安装在底盘装甲顶面三桥上方位置,底盘左后部上方安装电站、底盘后部中间位置安装主控台。
整个转塔方位方向可360°旋转,采用双电机消隙驱动;两组四联装箱弹组合分别安装于转塔两侧的发射架上,发射架在俯仰方向采用液压缸驱动,定角40°发射;跟踪雷达、光电跟踪仪、搜索雷达安装于炮塔中部,三个设备从前往后排列,跟踪雷达阵面后倾30°固定安装,光电跟踪仪及搜索雷达采用升降及倒伏机构进行工作状态与运输状态的姿态转换;伺服系统除了完成转塔方位伺服外,还包括搜索雷达的方位伺服,光电跟踪仪的方位及俯仰伺服;液压系统的液压泵、控制阀组、油箱等设备集中安装于转塔后部,发射架的俯仰推动缸、光电跟踪仪的倒伏液压缸、搜索雷达的升降及倒伏液压缸则分别安装于各个被驱动设备的对应位置。
如图1~图9所示,包括8X8轮式装甲底盘1(以下简称底盘1)、转塔2、电站3、主控台4、底座5、转台6、四联装箱弹组合7、左发射架8、右发射架9、跟踪雷达10、光电跟踪仪11、搜索雷达12、方位驱动机构13、光电方位伺服14、光电俯仰伺服15、安装底座16、天线座17、转轴18(2个)、弧形导轨19(2个)、液压泵20、控制阀组21、发射架俯仰液压缸22(2个)、光电倒伏液压缸23、水平滑轨24(2个)、滑动件25、水平联接轴26(2个)、联动件27、升降液压缸28(2个)、竖直滑轨29(2个)、竖直联接轴30(2个)、升降平台31、尾焰防护装置32、安装底板33、V型挡板34、支撑板35(7个)、主显示器36(2个)、副显示器37(2个)、操作键盘38(2个)、上柜体39(2个)、台面40(2个)、下柜体41(2个)。
各部分的连接关系为:底盘1是整个系统的安装平台,通过螺栓将转塔2(含火力系统和探测系统)、电站3及主控台4固定安装于底盘1上,如图1、图2和图3所示。电站3的安装充分考虑了装甲车的内部空间,安装于装甲车的左后方。转塔2具体通过其上的底座5用螺栓固定于底盘1上,转台6通过底座5上的轴承与底座5连接连接,转台6可在方位驱动系统13的驱动下360°旋转,为了提高方位驱动系统的刚性,采用双电机消隙驱动。火力系统及探测系统均安装于转台6上,其中四联装箱弹组合7通过左发射架8及右发射架9安装于转台6的左右两侧,发射架通过转轴18及弧形导轨19安装于转台6上,其俯仰方向的运动依靠俯仰液压缸22驱动。跟踪雷达10、光电跟踪仪11、搜索雷达12则从前往后依次安装于转台6的中部,其中跟踪雷达10阵面后倾30°固定安装于转台6上,光电跟踪仪11需要进行方位及俯仰方向的伺服运动,所以其安装于光电俯仰伺服15上,光电俯仰伺服15安装于光电方位伺服14上,同时为了运输状态不超高,整个光电跟踪仪11及其伺服系统14、15安装于安装底座16上,通过光电倒伏液压缸23的驱动可向后倒伏。搜索雷达12安装于天线座17上,为了实现搜索雷达的升降及倒伏,设计了联动机构,天线座22固定于联动机构的联动件27上。
如图5所示,联动机构由水平滑轨24(2个)、滑动件25、水平联接轴26(2个)、联动件27、升降液压缸28(2个)、竖直滑轨29(2个)、竖直联接轴30(2个)、升降平台31等组成。各部分的连接关系为:水平滑轨24的导轨固定于转台6上,水平滑轨24的滑块与滑动件25固连,水平联接轴26固定于联动件27上,同时与滑动件25有轴孔配合关系,联动件27与竖直联接轴30有轴孔配合关系。竖直联接轴30固定于升降平台28上,升降平台则通过升降液压缸28的液压杆及竖直滑轨29的内筒固定。升降液压缸28的套筒及竖直滑轨29的外筒固定于转台6上。
左尾焰防护装置及右尾焰防护装置分别固定于转台6的两侧。外尾焰防护装置及右尾焰防护装置镜像对称,都由安装底板33、V型挡板34(20个)、支撑板35(7个)焊接而成,V型挡板前边向下倾斜30°,后边向上倾斜10°,保证导弹在40°倾斜发射时形成的尾焰能顺利导流,导流后水平略向上,不会对车顶造成烧蚀,同时由于是栅格结构,所以阻力小,结构轻。
如图9所示,主控台由两个基本相同的机柜并排放置,为了适应装甲车的内部高度,机柜高度为1.27米,主副显示器上下安装,主显示器位于上方,竖直安装,副显示器位于下方,与水平方向成40°夹角安装,控制键盘等安装于台面上,与水平方向夹角为10.5°,如此布置,既满足了人机工程要求,又满足了装甲车对设备高度的特殊要求。
典型工作过程:
首先,完成整个系统从运输状态到工作状态的架设,架设内容包括左发射架、右发射架及其上安装的两组四联装箱弹组合仰起40°,仰起时以转轴18为旋转中心,弧形导轨19稳定支撑,在俯仰液压缸的驱动下由水平状态向上仰起40°,光电跟踪仪在光电倒伏液压缸23的驱动下仰起90°,由水平状态装换为竖直状态。搜索雷达的升起主要由联动机构实现,升降液压缸28伸长带动升降平台31向上运动。与升降平台31固连的竖直滑轨29的内筒也相对于外筒做直线运动,以保证升降平台的侧向刚性。联动件27通过竖直联接轴30随着升降平台31进行上升,同时由于水平联接轴26只能延水平滑轨24的导轨做直线运动。所以联动件27在上升运动的同时,也进行翻转运动,从而实现搜索雷达上升及竖起复合运动。由于以上架设动作相互独立,所以可同时进行,可以进行一键架设,大大缩短架设时间。
其次,导弹的安全发射,该导弹发射时方位为任意角度,俯仰40°定角,由于集成合理,在导弹发射时不会对跟踪雷达、光电跟踪仪、搜索雷达等探测设备造成烧蚀及影响。喷向车顶的尾焰会被尾焰防护装置有效导流,通过导流后尾焰成水平并略朝上的方向,不会对车顶造成烧蚀,同时通过实弹打靶,也验证了尾焰防护装置的可靠性。采用高速摄像拍摄的尾焰防护装置导流效果如图10所示。
最后,完成整个系统的撤收,撤收为架设的逆过程。撤收内容包括左发射架8、右发射架9及其上安装的两组四联装箱弹7组合倒伏40°,成水平状态。光电跟踪仪11在光电倒伏液压缸23的驱动下倒伏90°,由竖直状态装换为水平状态。搜索雷达12的下降及翻倒主要由联动机构实现,升降液压缸28收缩带动升降平台31向下运动。与升降平台31固连的竖直滑轨29的内筒也相对于外筒做直线运动,以保证升降平台的侧向刚性。联动件27通过竖直联接轴30随着升降平台31下降,同时由于水平联接轴26只能延水平滑轨24的导轨做直线运动。所以联动件27在下降运动的同时,也进行翻转运动,从而实现搜索雷达12下降及翻倒复合运动。由于以上撤收动作相互独立,所以可同时进行,可以进行一键撤收,大大缩短撤收时间。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。