一种手持无人机的干扰拦截装置
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及无人机拦截技术领域,尤其涉及一种手持无人机的干扰拦截装置。
背景技术
无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。机上无驾驶舱,但安装有自动驾驶仪、程序控制装置等设备。地面、舰艇上或母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输。可在无线电遥控下像普通飞机一样起飞或用助推火箭发射升空,也可由母机带到空中投放飞行。回收时,可用与普通飞机着陆过程一样的方式自动着陆,也可通过遥控用降落伞或拦网回收。可反复使用多次。广泛用于空中侦察、监视、通信、反潜、电子干扰等,随着无人机技术的快速更新,爆发式增长的无人机数量也带来了巨大的监管盲区,由于民用无人机与航模之间界限相对模糊,销售方面监管较弱,导致部分使用者肆意放飞,带来巨大的安全隐患。
现有的无人机干扰拦截装置在使用过程中,一般都是通过干扰器对无人机进行干扰,继而通过发射器将拦截网洒出,通过拦截网对无人机起到一个拦截的效果,然而,拦截网发射的过程中,无人机依旧处于飞行的状态,这将造成拦截网命中无人机的概率较低,导致无人机拦截失败的概率较大,从而降低该无人机干扰拦截装置的使用价值。
发明内容
本发明公开一种手持无人机的干扰拦截装置,旨在解决飞行中的无人机不易被拦截网命中拦截,导致无人机拦截失败的概率较大的技术问题。
为了实现上述目的,本发明采用了如下技术方案:
一种手持无人机的干扰拦截装置,包括移动座和固定杆,所述固定杆的顶部设有拦截组件,且拦截组件包括调节轨,调节轨固定连接于固定杆的顶部,调节轨的两端均固定连接有挡块,其中一个挡块的一侧固定连接有二号液压缸,二号液压缸的输出端固定连接有滑动块,滑动块滑动连接于调节轨的内部,所述滑动块的顶部固定连接有立杆,且立杆的顶部固定连接有顶板,顶板的外侧等距离固定连接有安装板,每两个安装板的相对一侧通过轴承连接有同一个旋转轴,其中一个安装板的外侧固定连接有机架,机架的内部固定连接有驱动电机,驱动电机的输出轴与旋转轴的一端通过联轴器连接,旋转轴的外侧环形分布有接触下压片,所述顶板的顶部等距离通过铰链连接有上扶挡板,且顶板靠近每个上扶挡板的顶部均固定连接有抵触板,抵触板面向上扶挡板的外侧等距离固定连接有连接弹簧,连接弹簧的另一端均固定连接于上扶挡板的外侧;
通过设置有拦截组件,在进行无人机的拦截时,通过干扰器对其进行干扰,继而将拦截组件抬升至靠近无人机的高度,调节二号液压缸带动滑动块在调节轨的内壁滑动,同时启动驱动电机,使得接触下压片处于一个翻转移动的状态,当无人机与任何一个方位上的接触下压片接触后,接触下压片对其施加一个向下的作用力,从而通过接触下压片不断的导向挤压,顺利的将无人机导向下方的接收组件中,实现无人机拦截,该拦截组件在工作过程中,无需精确的预判无人机的飞行轨迹,只需规定无人机的飞向范围,在一定的范围内,均可实现无人机的拦截,从而提高该干扰拦截装置的拦截概率,提高该干扰拦截装置的使用价值。
在一个优选的方案中,所述底座的底部两端均固定连接有轴板,且两个轴板的相对一侧等距离通过轴承连接有移动辊,移动座的一侧固定连接有推动架。
在一个优选的方案中,所述移动座的顶部等距离开有对接槽,且每个对接槽的内部均插接有对接柱,多个对接柱的顶部固定连接有同一个手持环架,手持环架的外侧固定连接有两个侧块,两个侧块的相向一侧外壁均固定连接有手提架;
通过设置有移动座和手提环架,手提环架与移动座之间通过对接槽和对接柱实现对接,在使用该干扰拦截装置时,工作人员可以选择手持和推动两种方式进行该装置的移动,推动方式降低劳动力投入,可快速实现位置上的调节,手持方式便于工作人员进行该装置的携带,可以用于一些崎岖的道路上,从而进一步提高该干扰拦截装置的使用价值。
在一个优选的方案中,所述手提环架的顶部环形分布有伸缩连接杆,且手提环架位于多个伸缩连接杆之间的顶部固定连接有气缸,气缸的输出端固定连接有升降环板,多个伸缩连接杆的另一端均固定连接于升降环板的底部。
在一个优选的方案中,所述升降环板的顶部设有接收组件,且接收组件包括多个接收网架,接收网架均通过铰链连接于升降环板的顶部。
在一个优选的方案中,所述升降环板位于每个接收网架下方的顶部均通过铰链连接有一号液压缸,且每个接收网架的顶部均固定连接有调节架,一号液压缸的输出端通过铰链连接于调节架的底部。
在一个优选的方案中,每个所述调节架的顶部两端均固定连接有轴杆,且位于同一个调节架上的两个轴杆的相对一侧通过轴承连接有同一个转动轴,转动轴的外侧环形分布有压制片。
在一个优选的方案中,所述升降环板位于多个接收网架之间的顶部固定连接有支撑柱,且固定杆固定连接于支撑柱的顶部。
在一个优选的方案中,所述支撑柱的外侧固定连接有中空锥形罩,且中空锥形罩的外侧环形开设有连接孔,每个连接孔的内部均固定连接有真空吸附盘,支撑柱位于中空锥形罩下方的外侧固定连接有两个泵架,两个泵架的外侧均固定连接有真空泵,真空泵的抽真空端均通过管道连接于中空锥形罩的内部;
通过设置有接收组件,当无人机被拦截组件拦截下后,其在接触下压片的作用下下降至接收组件上,调节一号液压缸带动接收网架向外侧展开,无人机与压制片接触后,无人机自身的重量对压制片进行挤压,使得转动轴发生旋转,则其他的压制片对无人机起到一个压制限位的效果,同时,启动真空泵,真空泵将中空锥形罩内部抽真空,通过真空吸附盘对无人机的外侧进行真空吸附,确保无人机在接收过程中不会出现脱离的情况,进一步提高该干扰拦截装置的使用价值。
在一个优选的方案中,所述升降环板的外侧固定连接有连接架,且连接架的外侧固定连接有干扰器。
由上可知,本发明提供的一种手持无人机的干扰拦截装置具有无需精确的预判无人机的飞行轨迹,只需规定无人机的飞向范围,在一定的范围内,均可实现无人机的拦截,从而提高该干扰拦截装置的拦截概率的技术效果。
附图说明
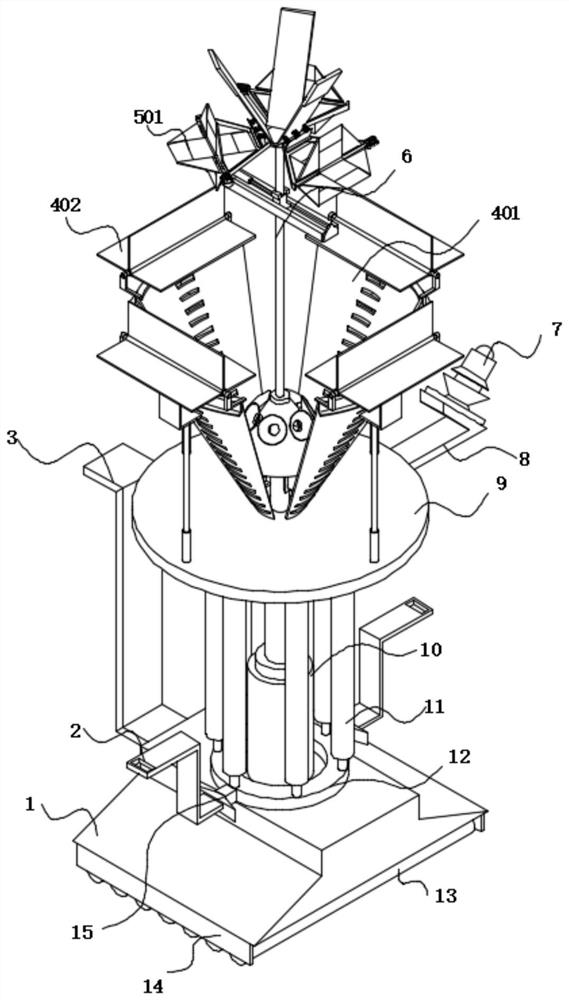
图1为本发明提出的一种手持无人机的干扰拦截装置的整体结构示意图。
图2为本发明提出的一种手持无人机的干扰拦截装置的整体结构俯视图。
图3为本发明提出的一种手持无人机的干扰拦截装置的拦截组件示意图。
图4为图3的平面结构示意图。
图5为本发明提出的一种手持无人机的干扰拦截装置的接收组件示意图。
图6为图5的局部结构放大图。
图7为本发明提出的一种手持无人机的干扰拦截装置的移动座和手持环架组合结构示意图。
图中:1、移动座;2、手提架;3、推动架;4、接收组件;401、接收网架;402、压制片;403、调节架;404、一号液压缸;405、真空泵;406、支撑柱;407、泵架;408、中空锥形罩;409、真空吸附盘;410、轴杆;411、转动轴;5、拦截组件;501、接触下压片;502、机架;503、旋转轴;504、挡块;505、二号液压缸;506、调节轨;507、连接弹簧;508、驱动电机;509、安装板;510、上扶挡板;511、顶板;512、立杆;513、滑动块;514、抵触板;6、固定杆;7、干扰器;8、连接架;9、升降环板;10、气缸;11、伸缩连接杆;12、手持环架;13、移动辊;14、轴板;15、侧块;16、对接槽;17、对接柱。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
本发明公开的一种手持无人机的干扰拦截装置主要应用于无人机在受到干扰器干扰的情况下,发射的拦截网不能高概率命中无人机导致无人机拦截失败的场景。
参照图1-7,一种手持无人机的干扰拦截装置,包括移动座1和固定杆6,固定杆6的顶部设有拦截组件5,且拦截组件5包括调节轨506,调节轨506固定连接于固定杆6的顶部,调节轨506的两端均固定连接有挡块504,其中一个挡块504的一侧固定连接有二号液压缸505,二号液压缸505的输出端固定连接有滑动块513,滑动块513滑动连接于调节轨506的内部,滑动块513的顶部固定连接有立杆512,且立杆512的顶部固定连接有顶板511,顶板511的外侧等距离固定连接有安装板509,每两个安装板509的相对一侧通过轴承连接有同一个旋转轴503,其中一个安装板509的外侧固定连接有机架502,机架502的内部固定连接有驱动电机508,驱动电机508的输出轴与旋转轴503的一端通过联轴器连接,旋转轴503的外侧环形分布有接触下压片501,顶板511的顶部等距离通过铰链连接有上扶挡板510,且顶板511靠近每个上扶挡板510的顶部均固定连接有抵触板514,抵触板514面向上扶挡板510的外侧等距离固定连接有连接弹簧507,连接弹簧507的另一端均固定连接于上扶挡板510的外侧。
具体的,拦截组件5在工作过程中,当无人机与上扶挡板510接触后,无人机的冲击带动上扶挡板510出现偏转,则连接弹簧507被拉伸,通过上扶挡板510和连接弹簧507实现无人机的缓冲,避免其损坏严重。
在具体的应用场景中,无人机与拦截组件5中的接触下压片501接触后,接触下压片501对其施加一个向下的作用力,从而通过接触下压片501不断的导向挤压,顺利的将无人机导向下方的接收组件4中,实现无人机拦截。
需要说明的是,在进行无人机的拦截时,通过干扰器7对其进行干扰,继而将拦截组件5抬升至靠近无人机的高度,调节二号液压缸505带动滑动块513在调节轨506的内壁滑动,同时启动驱动电机508,使得接触下压片501处于一个翻转移动的状态,当无人机与任何一个方位上的接触下压片501接触后,接触下压片501对其施加一个向下的作用力,从而通过接触下压片501不断的导向挤压,顺利的将无人机导向下方的接收组件4中,实现无人机拦截,该拦截组件5在工作过程中,无需精确的预判无人机的飞行轨迹,只需规定无人机的飞向范围,在一定的范围内,均可实现无人机的拦截,从而提高该干扰拦截装置的拦截概率,提高该干扰拦截装置的使用价值。
参照图1和图7,在一个优选的实施方式中,底座的底部两端均固定连接有轴板14,且两个轴板14的相对一侧等距离通过轴承连接有移动辊13,移动座1的一侧固定连接有推动架3,移动座1的顶部等距离开有对接槽16,且每个对接槽16的内部均插接有对接柱17,多个对接柱17的顶部固定连接有同一个手持环架12,手持环架12的外侧固定连接有两个侧块15,两个侧块15的相向一侧外壁均固定连接有手提架2。
具体的,手持该装置时,工作人员可以通过手持环架12外侧的两个手提架2进行装置的提拿,确保该装置在崎岖的导道路上便于携带。
在具体的应用场景中,该装置应用于平坦的道路上,将手持环架12下方的各个对接柱17卡入移动座1上的各个对接槽16中,从而实现手持环架12与移动座1的对接,使得该装置可以通过移动座1下方的各个移动辊13进行快速移动,提高无人机拦截效率。
需要说明的是,手提环架与移动座1之间通过对接槽16和对接柱17实现对接,在使用该干扰拦截装置时,工作人员可以选择手持和推动两种方式进行该装置的移动,推动方式降低劳动力投入,可快速实现位置上的调节,手持方式便于工作人员进行该装置的携带,可以用于一些崎岖的道路上,从而进一步提高该干扰拦截装置的使用价值。
参照图1和图2,手提环架的顶部环形分布有伸缩连接杆11,且手提环架位于多个伸缩连接杆11之间的顶部固定连接有气缸10,气缸10的输出端固定连接有升降环板9,多个伸缩连接杆11的另一端均固定连接于升降环板9的底部。
参照图1、图2、图5和图6,在一个优选的实施方式中,升降环板9的顶部设有接收组件4,且接收组件4包括多个接收网架401,接收网架401均通过铰链连接于升降环板9的顶部,升降环板9位于每个接收网架401下方的顶部均通过铰链连接有一号液压缸404,且每个接收网架401的顶部均固定连接有调节架403,一号液压缸404的输出端通过铰链连接于调节架403的底部,每个调节架403的顶部两端均固定连接有轴杆410,且位于同一个调节架403上的两个轴杆410的相对一侧通过轴承连接有同一个转动轴411,转动轴411的外侧环形分布有压制片402,升降环板9位于多个接收网架401之间的顶部固定连接有支撑柱406,且固定杆6固定连接于支撑柱406的顶部,支撑柱406的外侧固定连接有中空锥形罩408,且中空锥形罩408的外侧环形开设有连接孔,每个连接孔的内部均固定连接有真空吸附盘409,支撑柱406位于中空锥形罩408下方的外侧固定连接有两个泵架407,两个泵架407的外侧均固定连接有真空泵405,真空泵405的抽真空端均通过管道连接于中空锥形罩408的内部。
需要说明的是,当无人机被拦截组件5拦截下后,其在接触下压片501的作用下下降至接收组件4上,调节一号液压缸404带动接收网架401向外侧展开,无人机与压制片402接触后,无人机自身的重量对压制片402进行挤压,使得转动轴411发生旋转,则其他的压制片402对无人机起到一个压制限位的效果,同时,启动真空泵405,真空泵405将中空锥形罩408内部抽真空,通过真空吸附盘409对无人机的外侧进行真空吸附,确保无人机在接收过程中不会出现脱离的情况,进一步提高该干扰拦截装置的使用价值。
参照图1,升降环板9的外侧固定连接有连接架8,且连接架8的外侧固定连接有干扰器7。
工作原理:使用时,将干扰器7打开,继而通过干扰器7对无人机的飞行进行干扰,继而将该干扰拦截装置移动至指定位置,调节气缸10带动升降环板9进行升降,将拦截组件5抬升至靠近无人机的高度,调节二号液压缸505带动滑动块513在调节轨506的内壁滑动,同时启动驱动电机508,使得接触下压片501处于一个翻转移动的状态,当无人机与任何一个方位上的接触下压片501接触后,接触下压片501对其施加一个向下的作用力,从而通过接触下压片501不断的导向挤压,顺利的将无人机导向下方的接收组件4中,调节一号液压缸404带动接收网架401向外侧展开,无人机与压制片402接触后,无人机自身的重量对压制片402进行挤压,使得转动轴411发生旋转,则其他的压制片402对无人机起到一个压制限位的效果,同时,启动真空泵405,真空泵405将中空锥形罩408内部抽真空,通过真空吸附盘409对无人机的外侧进行真空吸附,确保无人机在接收过程中不会出现脱离的情况,拦截完成后,气缸10复位,工作人员将无人机取下,重复操作。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。