一种基于CV和AI算法和电磁炮的自动瞄准系统及方法
文献发布时间:2023-06-29 06:30:04
本申请是名为《一种基于CV和AI算法和电磁炮的自动瞄准系统》的专利申请的分案申请,原申请的申请日为2021年09月30日,申请号为202111157973.2。
技术领域
本发明涉及电磁炮技术领域,特别是涉及一种基于CV和AI算法和电磁炮的自动瞄准系统及方法。
背景技术
电磁炮若要实现其准确的命中率必须采用打靶的方式对电磁炮进行弹道模型训练,测试电磁炮离与目标之间的距离与所需的升压的关系,并将训练的数据存储在主控电脑内,从而实现在电磁炮下次检测到目标就可以匹配相应的电压以准确的命中目标,同时也能够为电磁炮日后的研制提供弹道模型数据。但是电磁炮的精准命中率是建立在精准的运动目标识别和运动目标跟踪的基础上的,而现有的电磁炮自动瞄准系统只能识别运动速度相对较低的目标,并且现有的电磁炮自动瞄准系统只有在摄像机处于静止时才能精准的定位目标,当遇到目标移动速度较快以及炮筒和目标均处在移动状态时电磁炮自动瞄准系统就不能够有效的识别和跟踪目标。
发明内容
为了克服现有技术的不足,本发明的目的是提供一种基于CV和AI算法和电磁炮的自动瞄准系统及方法。
为实现上述目的,本发明提供了如下方案:
一种基于CV和AI算法和电磁炮的自动瞄准系统,包括主机、底盘、转台、相机、炮筒、目标识别模块、目标跟踪模块、双向稳定模块、主机和靶台,所述底盘上设有转台和天线,所述转台包括方位电机和俯仰电机,所述方位电机输出轴端安装炮架,所述方位电机壳体端部安装方位角度传感器,所述炮架上部安装炮座,所述俯仰电机壳体端部安装俯仰角度传感器,所述目标识别模块用于识别击打目标的位置以及周期性测量与所述击打目标之间的距离,所述主机使用基于CV的金字塔分层的LK光流算法控制转台按照给定角度信息精确的运动保证相机的视轴始终指向运动目标,所述双向稳定模块用于调整炮筒在运动状态下炮筒的俯仰角和方位角确保炮筒在运动状态下的稳定性;
所述目标识别模块包括相机、激光测距仪和主机,所述相机安装于炮座顶部,所述激光测距仪安装于炮座前部,所述相机、激光测距仪和炮筒的轴线互相平行,所述相机用于捕捉目标图像并将目标图像信息传送至主机,所述激光测距仪用于测量电磁炮炮筒与目标之间的距离,并将距离信息传送至主机,所述主机用于对相机所传送的目标信息进行处理并使用基于CV算法中的金字塔分层的LK光流算法实现识别运动目标并提取目标的角点作为特征点,其中金字塔分层的LK光溜算法只对目标特征角点进行匹配及光流计算,计算速度也比较快,能够满足实时性要求,所述光流算法在识别出运动目标后,以角点来标识运动目标,能够跟踪任何具有角点特征的运动目标;
所述目标跟踪模块包括俯仰电机、方位电机和主机,所述俯仰电机用于调整炮筒的俯仰角度,所述方位电机用于调整炮筒的瞄准方位角度,所述主机采用基于CV算法中的金字塔分层的LK光流算法计算出每个图像采集周期内运动目标特征角点位置信息,并将图像中的目标特征角点位置信息转换为转台内方位电机和俯仰电机的旋转角度信息,所述主机还用于对方位电机和俯仰电机的旋转角度信息进行分析和计算,并指令俯仰电机和方位电机运转把目标锁定在相机的视场中心;
所述双向稳定模块包括陀螺仪组件、俯仰电机和方位电机,所述陀螺仪组件安装于炮座后部,所述陀螺仪组件用于监测炮筒在竖直方向上的俯仰角度和水平方向上的方位角度变化,并将炮筒实时的俯仰角度数据和方位角度数据传送至主机,所述主机用于对陀螺仪组件传输来的炮筒实时的俯仰角度数据和方位角度数据进行分析和计算,并在对俯仰角度数据和方位角度数据分析和计算后指令俯仰电机和方位电机运转对炮筒俯仰角度和方位角度进行补偿调整以实现在底盘带动炮筒运动时炮筒能够趋于稳定;
所述靶台包括控制柜、底座、支架、水平齿条滑轨和竖直齿条滑轨,所述底座上对称安装支架,两个所述支架上安装水平齿条滑轨,所述水平齿条滑轨的数量不少于两个,两个所述水平齿条滑轨上均啮合有第一电控滑块,两个所述第一电控滑块上安装竖直齿条滑轨,所述竖直齿条滑轨上安装第二电控滑块,所述第二电控滑块表面安装靶标,所述靶台用于对电磁炮自动瞄准系统进行弹道模型训练,所述控制柜用于控制第一电控滑块和第二电控滑块的运行速度;
所述底盘上还安装电源,所述电源用于对天线、激光测距仪、相机、目标识别模块、目标跟踪模块和陀螺仪组件供电,所述天线用于接收主机遥控装置的信号并对底盘进行运动控制。
一种使用上述自动瞄准系统来捕捉靶标和训练电磁炮弹道模型的方法,包括:
给主机、控制柜、转台和靶台上电,启动主机内的运动目标识别和跟踪程序,打开运动目标识别和跟踪程序的图像显示,手动运行主机内目标识别和跟踪程序使待跟踪靶标处于相机视场内并保持靶标处于图像中心;
手动运行控制柜靶标移动程序指令第一电控滑块和第二电控滑块运转带动靶标移动,此时主机端连续采集靶标图像,根据光流算法提取靶标位置数据,主机对靶标位置数据进行计算后得到转台的旋转角度,主机指令转台内的俯仰电机和方位电机运转以实时的跟踪靶标,其中通过控制柜可调节靶标移动的速度;
主机控制转台内的俯仰电机和方位电机运转对靶标实时跟踪后,主机指令激光测距仪启用并测量炮筒与靶标的距离值,激光测距仪将测得的距离值传送至主机后,主机对距离值进行存储运算并指令电磁炮驱动电路升压击打靶标,重复以上步骤后即可实现电磁炮弹道模型训练。
根据本发明提供的具体实施例,本发明公开了以下技术效果:
本发明通过目标识别模块和目标跟踪模块实现了对动态靶标的识别和捕捉,其中主机通过基于CV算法中的金字塔分层的LK 光流算法计算出每个图像采集周期内运动目标特征角点位置信息,并将图像中的目标特征角点位置信息转换为转台内方位电机和俯仰电机的旋转角度信息,主机对方位电机和俯仰电机的旋转角度信息分析计算后指令俯仰电机和方位电机运转带动相机运动把目标锁定在相机的视场中心实现对靶标的捕捉,此外陀螺仪组件实现了在炮筒被底盘带动而运动的状态下能够控制炮筒在竖直方向和水平方向上的稳定,从而有利于自动瞄准系统对目标的识别和捕捉。
此外,通过靶台与激光测距仪的结合,实现对电磁炮自动瞄准系统进行弹道模型训练,测试电磁炮离目标之间的距离与所需的升压的关系,并将训练的数据存储在主机内,从而实现在电磁炮下次检测到目标就可以匹配相应的电压以准确的命中目标。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
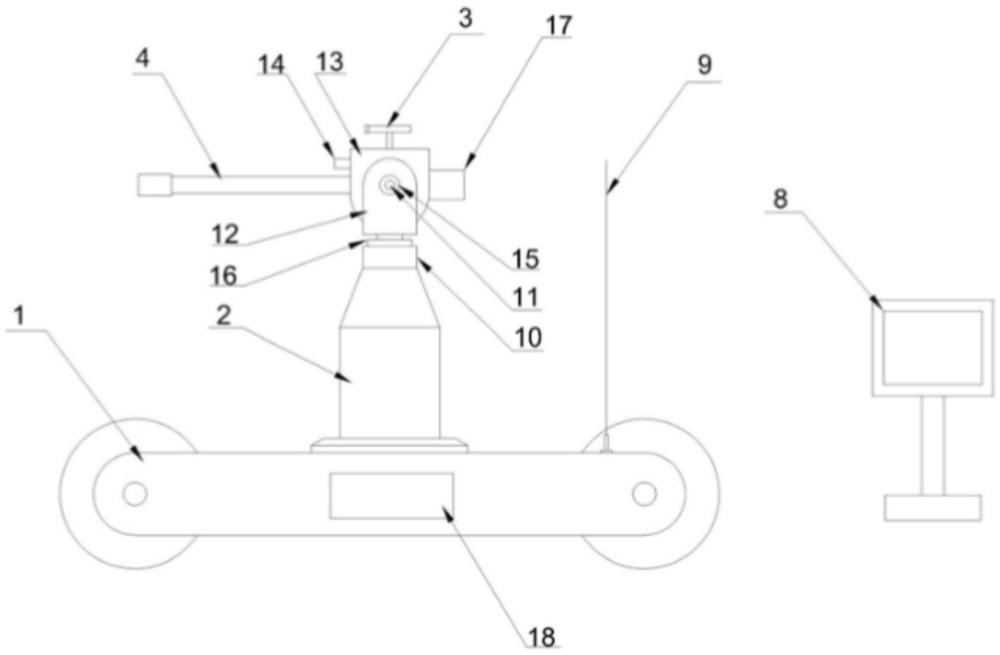
图1为本发明电磁炮和底盘结构视图。
图2为本发明靶台结构视图。
图3为本发明目标识别模块示意图。
图4为本发明目标跟踪模块示意图。
图5为本发明双向稳定模块示意图。
附图标记说明:1、底盘;2、转台;3、相机;4、炮筒;5、目标识别模块;6、目标跟踪模块;7、双向稳定模块;8、主机;9、天线;10、方位电机;11、俯仰电机;12、炮架;13、炮座;14、激光测距仪;15、俯仰角度传感器;16、方位角度传感器;17、陀螺仪组件;18、电源;19、控制柜;20、靶台;21、底座;22、支架;23、水平齿条滑轨;24、竖直齿条滑轨;25、第一电控滑块;26、第二电控滑块;27、靶标。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本申请的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
如图1至图5所示,本实施例的基于CV和AI算法和电磁炮的自动瞄准系统,包括底盘1、转台2、相机3、炮筒4、目标识别模块5、目标跟踪模块6、双向稳定模块7、主机8和靶台19,底盘1上设有转台2和天线9,转台2包括方位电机10和俯仰电机11,方位电机10输出轴端安装炮架12,方位电机10壳体端部安装方位角度传感器16,炮架12上部安装炮座13,俯仰电机11壳体端部安装俯仰角度传感器15,目标识别模块5用于识别击打目标的位置以及周期性测量与击打目标之间的距离,所述主机8使用基于CV的金字塔分层的LK光流算法控制转台2按照给定角度信息精确运动,保证相机3的视轴始终指向运动靶标,双向稳定模块7用于补偿调整炮筒4在运动状态下炮筒4的俯仰角和方位角确保炮筒4在运动状态下的稳定性。
更具体的,在双向稳定模块7将炮筒调节至稳定状态后,俯仰角度传感器15和方位角度传感器16分别用于检测炮筒4实时的俯仰角和方位角度数据,俯仰角度传感器15和方位角度传感器16将实时的俯仰角和方位角数据传送至主8机,主机8根据实时的俯仰角和方位角数据分析计算炮筒4调整后的最终状态,俯仰角度传感器15和方位角度传感器16作为炮筒4调整后的状态检测传感器,还用于实时监测炮筒4是否出现失调和调节过度的现象,若炮筒4的俯仰角和方位角出现失调和调整过度的现象,主机将再次指令俯仰电机11和方位电机10运转对炮筒4进行二次调整,实现了炮筒4俯仰角和方位角的闭环调节。
具体的,目标识别模块5包括相机3、激光测距仪14和主机8,相机3安装于炮座13顶部,激光测距仪14安装于炮座13前部,相机3、激光测距仪14和炮筒4的轴线互相平行,相机3用于捕捉目标图像并将目标图像信息传送至主机8,激光测距仪14用于测量电磁炮炮筒4与目标之间的距离,并将距离信息传送至主机8,主机8用于对相机3所传送的目标信息进行处理并使用基于CV算法中的金字塔分层的LK 光流算法实现识别运动目标并提取目标的角点作为特征点。
更具体的,由于实际运动目标信息的状态及观测存在噪声影响,而滤波预测可以达到对运动目标当前时刻状态估计以及未来时刻状态预测,从而控制炮筒4按照预测信息运动,一定程度上减小由于跟踪滞后于图像采集时间带来的误差,所以本发明的一种基于CV和AI算法和电磁炮的自动瞄准系统需采用卡尔曼滤波预测算法对运动目标的位置进行预测来减小由于控制滞后于图像采集带来的误差。
更具体的,激光测距仪14在测量出炮筒4与目标之间的距离值后将该距离值传送至主机8,主机8在接收到此距离值的信息后作为电磁炮驱动电路升压的参考值并对靶标27射击。其中金字塔分层的LK光溜算法只对目标特征角点进行匹配及光流计算,计算速度也比较快,能够满足实时性要求,光流算法在识别出运动目标后,以角点来标识运动目标,能够跟踪任何具有角点特征的运动目标。
具体的,目标跟踪模块6包括俯仰电机11、方位电机10和主机8,俯仰电机11用于调整炮筒4的俯仰角度,方位电机10用于调整炮筒4的瞄准方位角度,主机8采用基于CV算法中的金字塔分层的LK 光流算法计算出每个图像采集周期内运动目标特征角点位置信息,并将图像中的目标特征角点位置信息转换为转台2内方位电机10和俯仰电机11的旋转角度信息,主机8对方位电机10和俯仰电机11的旋转角度信息分析计算后指令俯仰电机11和方位电机10运转把目标锁定在相机3的视场中心。
更具体的,在实际工作中,为保证跟踪的稳定性及准确性,在目标偏离运动中心较大时,可首先对运动目标进行识别并提取目标位置,然后控制炮筒4平稳的指向运动目标再进行实时跟踪。
具体的,所述双向稳定模块7包括陀螺仪组件17、俯仰电机11和方位电机10,所述陀螺仪组件17安装于炮座13后部,所述陀螺仪组件17用于监测炮筒4在竖直方向上的俯仰角度和水平方向上的方位角度变化,并将炮筒4实时的俯仰角度数据和方位角度数据传送至主机8,所述主机8用于对陀螺仪组件17传输来的炮筒4实时的俯仰角度数据和方位角度数据进行分析和计算,并在对俯仰角度数据和方位角度数据分析和计算后指令俯仰电机11和方位电机10运转对炮筒俯仰角度和方位角度进行补偿调整以实现在底盘1带动炮筒4运动时炮筒4能够趋于稳定。
具体的,靶台包括控制柜19、底座21、支架22、水平齿条滑轨23和竖直齿条滑轨24,所述底座21上对称安装支架22,两个所述支架22上安装水平齿条滑轨23,所述水平齿条滑轨23的数量不少于两个,两个所述水平齿条滑轨23上均啮合有第一电控滑块25,两个所述第一电控滑块25上安装竖直齿条滑轨24,竖直齿条滑轨24上安装第二电控滑块26,所述第二电控滑块26表面安装27靶标,靶台20用于对电磁炮自动瞄准系统进行弹道模型训练,控制柜19用于控制第一电控滑块25和第二电控滑块26的运行速度,其中第一电控滑块25和第二电控滑块26均与控制柜连接。
具体的,底盘1上还安装电源18,电源18用于对天线9、激光测距仪14、相机3、目标识别模块5、目标跟踪模块6和陀螺仪组件17供电,天线9用于接收主机8遥控装置的信号并对底盘1进行运动控制,其中相机3、方位电机10、俯仰电机11、激光测距仪14、俯仰角度传感器15、方位角度传感器16和陀螺仪组件17均与主机连接。
基于上述所述的一种基于CV和AI算法和电磁炮的自动瞄准系统本发明还提供了一种使用上述所述的自动瞄准系统来捕捉靶标和训练电磁炮弹道模型的方法,包括以下内容:
一、相机采集图像,
给主机8、控制柜19、转台2和靶台20上电,启动主机8内的运动目标识别和跟踪程序,打开运动目标识别和跟踪程序的图像显示,手动运行主机8内目标识别和跟踪程序使待跟踪靶标27处于相机3视场内并保持靶标27处于图像中心;
二、目标识别与跟踪,
手动运行控制柜靶标27移动程序指令第一电控滑块25和第二电控滑块26运转带动靶标27移动,此时主机8端连续采集靶标27图像,根据光流算法提取靶标27位置数据,主机8对靶标27位置数据进行计算后得到转台2的旋转角度,主机8指令转台2内的俯仰电机11和方位电机10运转以实时的跟踪靶标27,其中通过控制柜19可调节靶标27移动的速度;
三、激光测距,
主机8控制转台2内的俯仰电机11和方位电机10运转对靶标27实时跟踪后,主机8指令激光测距仪14启用并测量炮筒4与靶标27的距离值,激光测距仪14将测得的距离值传送至主机8后,主机8对距离值进行存储运算并指令电磁炮驱动电路升压击打靶标27,重复以上步骤后即可实现电磁炮弹道模型训练。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。