一种自动部署及回收靶车系统
文献发布时间:2024-01-17 01:17:49
技术领域
本申请涉及训练装备技术领域,尤其是涉及一种自动部署及回收靶车系统。
背景技术
火炮靶车是一种提供给部队使用的训练装备,作用是提供射击目标。目前常用的火炮靶车有轨道类和小车类。轨道类移动靶车借助预先铺设好的轨道移动,这种靶车的移动轨迹固定,常用于固定训练场地内;小车类移动靶车能够在地面上自主移动,适合在野外训练,考虑到野外复杂环境,部分无法到达的位置无法进行部署。
随着技术的不断进步,各种无人技术的应用也更加广泛,例如开始出现使用提前空降方式进行部署的隐藏射击单元,这就对训练提出了更高要求,需要考虑全地形覆盖、目标突然出现以及快速识别等内容,目前的火炮靶车无法满足这些训练要求。
发明内容
本申请提供一种自动部署及回收靶车系统,可以通过空投的方式进行快速部署,部署速度快,部署位置丰富,在配合训练过程中能够提供突然出现的射击目标,使训练过程更加接近于实际使用中的状态。
本申请的上述目的是通过以下技术方案得以实现的:
本申请提供了一种自动部署及回收靶车系统,包括:
底座;
自平衡调整平台,设在底座上,自动调整平台和底座间存在间隙;
第一电动摆臂和第二电动摆臂,均设在自平衡调整平台上;
红外线发射器和红外线接收器,分别设在第一电动摆臂和第二电动摆臂上;
连接井,设在自平衡调整平台上;
电磁铁,设在连接井的底面上;
电动伸缩单元,设在自平衡调整平台上,电动伸缩单元的活塞能够穿过连接井的侧壁并伸入到连接井内;以及
控制单元,与自平衡调整平台、第一电动摆臂、第二电动摆臂、红外线发射器、红外线接收器、电磁铁和电动伸缩单元电连接并与上位机进行数据通讯。
在本申请的一种可能的实现方式中,自平衡调整平台包括:
操作平台;
立柱,第一端固定在操作平台上,第二端上设有球体,球体位于底座上的球形槽内;
水平陀螺传感器,设在立柱内;以及
多个调节单元,设在操作平台上,调节单元的活塞抵接在底座上。
在本申请的一种可能的实现方式中,调节单元的数量为四个,四个调节单元围绕立柱的轴线在操作平台上均匀设置。
在本申请的一种可能的实现方式中,操作平台包括基础平台和设在基础平台上的转动平台;
立柱的第一端固定在基础平台上;
第一电动摆臂和第二电动摆臂设在转动平台上;
转动平台与控制单元电连接。
在本申请的一种可能的实现方式中,还包括:
爆炸式发射器,设在底座上并与控制单元电连接;
环形拦截网,内环固定在底座上,外环与爆炸式发射器连接;以及
回收拉绳,第一端固定在环形拦截网的外环上,第二端固定在自平衡调整平台上;
其中,底座和自平衡调整平台采用可分离方式连接。
在本申请的一种可能的实现方式中,爆炸式发射器的数量为多个并在底座上均匀设置。
在本申请的一种可能的实现方式中,其特征在于:
第一半球底座,设在底座上;
第二半球底座,与第一半球底座可分离连接;以及
连接器,设在第一半球底座或者底座上并与控制单元电连接;连接器配置为连接第一半球底座和第二半球底座。
在本申请的一种可能的实现方式中,第二半球底座上设有连接件,连接件伸入到第一半球底座上的连接孔内;
连接器的活塞能够伸入到第一半球底座内并穿过连接件。
在本申请的一种可能的实现方式中,靠近电磁铁的方向上,连接井的直径趋于减小。
在本申请的一种可能的实现方式中,红外线发射器选用有色红外线发射器。
附图说明
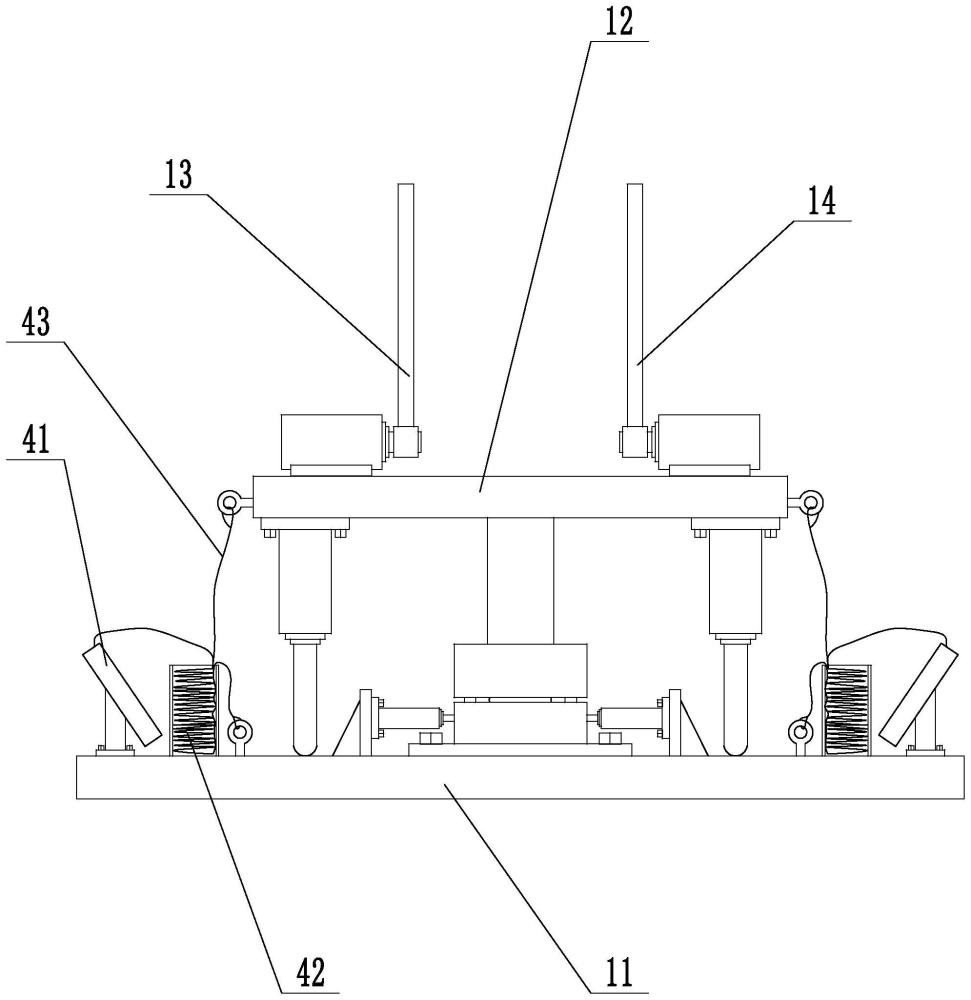
图1是本申请提供的一种自动部署及回收靶车系统的结构性示意图。
图2是本申请提供的一种红外线发射器和红外线接收器在第一电动摆臂和第二电动摆臂上的位置示意图。
图3是本申请提供的一种红外线发射器和红外线接收器启动时的原理性示意图,图中虚线表示红外线。
图4是本申请提供的一种检测到训练飞行单元的原理性示意图,图中虚线表示红外线。
图5是本申请提供的一种与连接体进行连接的相关结构示意图。
图6是本申请提供的一种连接体与自平衡调整平台连接前的示意图。
图7是本申请提供的一种连接体与自平衡调整平台完成连接的示意图。
图8是本申请提供的一种控制单元的结构示意框图。
图9是本申请提供的一种自平衡调整平台的结构示意框图。
图10是本申请提供的一种操作平台提供转动功能的原理性示意图。
图中,11、底座,12、自平衡调整平台,13、第一电动摆臂,14、第二电动摆臂,21、红外线发射器,22、红外线接收器,31、连接井,32、电磁铁,33、电动伸缩单元,6、控制单元,121、操作平台,122、立柱,123、球体,124、水平陀螺传感器,125、调节单元,1211、基础平台,1212、转动平台,41、爆炸式发射器,42、环形拦截网,43、回收拉绳,71、第一半球底座,72、第二半球底座,73、连接器,74、连接件,601、CPU,602、RAM,603、ROM,604、系统总线。
具体实施方式
以下结合附图,对本申请中的技术方案作进一步详细说明。
本申请公开了一种自动部署及回收靶车系统,主要由底座11、自平衡调整平台12、第一电动摆臂13、第二电动摆臂14、红外线发射器21、红外线接收器22、连接井31、电磁铁32、电动伸缩单元33和控制单元6等组成,请参阅图1,自平衡调整平台12安装在底座11上,作用是提供一个水平面,基于该水平面,可以进行连接、投放、部署和回收作业等内容。
因为在部署过程中,无法保证每一个部署位置处均为水平地面,为了解决该问题,本申请使用底座11与部署位置接触的方式进行部署,然后使用自平衡调整平台12来提供一个平面。
第一电动摆臂13和第二电动摆臂14均设在自平衡调整平台12上,这两个电动摆臂可以同时升起和落下,电动摆臂升起时,打击目标出现;电动摆臂落下时,打击目标消失。
结合图1和图2,第一电动摆臂13和第二电动摆臂14上分别安装有红外线发射器21和红外线接收器22,红外线发射器21发出的信号能够被红外线接收器22检测到。使用过程中,红外线发射器21和红外线接收器22随第一电动摆臂13和第二电动摆臂14升起,由休眠状态转为工作状态,此时红外线发射器21发出的信号被红外线接收器22检测到。
在一些可能的实现方式中,红外线发射器21和红外线接收器22的两侧均具有侧翼,侧翼的目的保护红外线发射器21和红外线接收器22,避免红外线发射器21和红外线接收器22受到机械损伤。
对比图3和图4,当有飞行单元(炮弹、子弹等)穿过红外线发射器21和红外线接收器22之间的距离时,会阻挡红外线发射器21发出的信号,也就是对于处于工作状态的红外线接收器22而言,当出现无法收到挡红外线发射器21发出的信号并瞬时恢复的情况时,认为有飞行单元飞过红外线发射器21和红外线接收器22之间。
此处需要说明的是,本申请提供的自动部署及回收靶车系统,配合训练飞行单元使用,训练飞行单元仅具有飞行能力(不具备爆破或者打击能力),训练飞行单元在日常训练中使用。
请参阅图5,自平衡调整平台12上设置有一个连接井31,连接井31底部固定安装有一个电磁铁32,电磁铁32的作用是将连接体吸附到连接井31内。电动伸缩单元33安装在自平衡调整平台12上,并且电动伸缩单元33的活塞能够穿过连接井31的侧壁并伸入到连接井31内。
在一些可能的实现方式中,靠近电磁铁32的方向上,连接井31的直径趋于减小。
当连接体进入到连接井31内并被电磁铁32吸附时,电动伸缩单元33的活塞伸出并插入到连接体侧面上的环形凹槽内,将自平衡调整平台12与连接体固定到一起。
对比图6和图7,上文中提到的连接体安装在无人机上,例如使用吊绳悬挂的方式无人机起飞后,连接体悬空。当无人机移动到连接井31上方时,开始在竖直方向上下降,此时连接体在磁力的作用下,会滑入到连接井31内。电磁铁32起到辅助连接的作用,当连接体需要与自平衡调整平台12脱离接触时,电动伸缩单元33的活塞复位。
也就是说,本申请提供的自动部署及回收靶车系统,具备使用无人机部署的能力,这种部署方式能够忽略地形影响,可以在任意位置(满足底座11放置要求)处进行部署,回收时也能够通过无人机进行直接回收。
上文中提到的涉及自动化的过程依托控制单元6实现,控制单元6与自平衡调整平台12、第一电动摆臂13、第二电动摆臂14、红外线发射器21、红外线接收器22、电磁铁32和电动伸缩单元33电连接并与上位机进行数据通讯。
与自平衡调整平台12、第一电动摆臂13、第二电动摆臂14、红外线发射器21、红外线接收器22、电磁铁32和电动伸缩单元33电连接的目的是通过内置程序实现上述自动化过程;与上位机进行数据通讯的目的是汇报打击情况,例如在某个时刻检测到了训练飞行单元。
请参阅图8,控制单元6可以是一个CPU,微处理器,ASIC,或一个或多个用于控制上述内容的程序执行的集成电路。控制器6主要由CPU601、RAM602、ROM603和系统总线604等组成,其中CPU601,RAM602和ROM603均连接在系统总线604上。
自平衡调整平台12、第一电动摆臂13、第二电动摆臂14和电动伸缩单元33的动力元件均为电机,电机的控制通过开关和换向器实现,开关负责启动和停止,换向器负责正反转。开关和换向器的控制通过继电器实现,开关、换向器和继电器统称为控制电路,自平衡调整平台12、第一电动摆臂13、第二电动摆臂14和电动伸缩单元33均通过控制电路连接在系统总线604上。
电磁铁32的仅通过开关(通电和断电)就能够实现,原理与电机控制的原理类似,此处,电磁铁32同样通过控制电路连接在系统总线604上。
红外线发射器21与电磁铁32的控制原理相同,同样通过控制电路连接在系统总线604上。
红外线接收器22通过通讯电路连接在系统总线604上。举例说明,红外线接收器22产生数字信号,可以通过ADC转换器连接在系统总线604上。
这样可以在训练完成后进行数据汇总,通过发射数据与本申请提供的打击数据进行比对,得到训练结果。
请参阅图9,在一些例子中,自平衡调整平台12由操作平台121、立柱122、球体123、水平陀螺传感器124和调节单元125等组成,立柱122的第一端固定在操作平台121上,第二端上设有球体123,球体123位于底座11上的球形槽内。立柱122内部还安装有一个水平陀螺传感器124,水平陀螺传感器124的作用是提供调整参考。
水平陀螺传感器124提供的数据供给调节单元125使用,调节单元125的数量为多个,这些调节单元125安装在操作平台121上,调节单元125的活塞抵接在底座11上。当调节单元125的活塞的伸出长度发生变化时,操作平台121的水平度也会随之发生变化。
在一些可能的实现方式中,调节单元125的数量为四个,四个调节单元125围绕立柱122的轴线在操作平台121上均匀设置。
请参阅图10,在一些例子中,操作平台121由基础平台1211和设在基础平台1211上的转动平台1212两部分组成,立柱122的第一端固定在基础平台1211上,第一电动摆臂13和第二电动摆臂14设在转动平台1212上。
在一些可能的实现方式中,转动平台1212安装在基础平台1211上,二者之间通过轴承连接,转动平台1212上安装有一个齿圈,基础平台1211上安装有一个驱动电机,驱动电机上的齿轮与齿圈啮合,驱动转动平台1212转动。
基础平台1211可以提供一个水平面,而转动平台1212可以提供360°的全角度覆盖能力。转动平台1212与控制单元6电连接,能够在控制单元6的控制下进行转动,该过程中,第一电动摆臂13和第二电动摆臂14也会随之转动,也就意味着第一电动摆臂13和第二电动摆臂14的朝向发生了改变。
此处在第一电动摆臂13和第二电动摆臂14自身提供的摆动能力,也就意味着红外线发射器21和红外线接收器22可以在一个半球面上提供训练飞行单元的检测能力。
该检测能力意味着本申请公开的自动部署及回收靶车系统可以为多个训练单元提供打击目标,打击目标朝向的调整范围大,覆盖角度广,更加符合实际中的应用场景。
在一些例子中,请参阅图1,还增加了爆炸式发射器41、环形拦截网42和回收拉绳43,爆炸式发射器41安装在底座11上并与控制单元6电连接,环形拦截网42的内环固定在底座11上,外环与爆炸式发射器41连接。
当爆炸式发射器41启动后,能够带动环形拦截网42展开。
回收拉绳43的第一端固定在环形拦截网42的外环上,第二端固定在自平衡调整平台12上,作用是带动环形拦截网42的外环向靠近自平衡调整平台12的方向聚拢。
此处,底座11和自平衡调整平台12采用可分离方式连接,可以分离方式连接的作用是在对本申请提供的自动部署及回收靶车系统进行回收时,底座11与自平衡调整平台12会自动脱离接触。
此时自平衡调整平台12首先上升,并通过回收拉绳43将环形拦截网42拉起,环形拦截网42的外环开始向靠近自平衡调整平台12的方向聚拢。落在环形拦截网42上的训练飞行单元随着环形拦截网42向靠近自平衡调整平台12的方向聚拢。
环形拦截网42聚拢完成后,底座11与地面脱离接触,因为环形拦截网42的内网固定在底座11上,因此环形拦截网42上的训练飞行单元会一同被回收。因为训练飞行单元可以重复使用,因此在本申请中,对训练飞行单元进行回收,回收范围为环形拦截网42的覆盖范围。
在一些可能的实现方式中,爆炸式发射器41的数量为多个并在底座11上均匀设置。这些爆炸式发射器41的朝向不同,作用是使环形拦截网42能够尽可能展开。
可分离连接通过以下方式实现,请参阅图9,底座11上固定安装有第一半球底座71,第二半球底座72与第一半球底座71可分离连接,立柱122上的球体123位于第一半球底座71和第二半球底座72形成的空腔中。
连接器73设置在第一半球底座71或者底座11上并与控制单元6电连接;作用是连接第一半球底座71和第二半球底座72。
在一些可能的实现方式中,第二半球底座72上设有连接件74,连接件74伸入到第一半球底座71上的连接孔内,连接器73的活塞能够伸入到第一半球底座71内并穿过连接件74,将第一半球底座71与第二半球底座72连接在一起。
当连接器73与连接件74脱离接触后,第一半球底座71与第二半球底座72自动脱离接触,此时也意味着底座11和自平衡调整平台12脱离连接。
在一些例子中,红外线发射器21选用有色红外线发射器,有色红外线发射器发出的红外线具有更高的辨识度,方便进行目标识别。这种方式的优势在于能够忽略掉机械结构(底座11、自平衡调整平台12第一电动摆臂13和第二电动摆臂14等)的影响。
本具体实施方式的实施例均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。