一种自动可循环弹射装置
文献发布时间:2024-01-17 01:24:51
技术领域
本发明涉及一种自动可循环弹射装置.
背景技术
随着现代科技以及工业的发展,对弹射装置的需求不断增多,常用的弹射装置有电磁弹射装置、液压式弹射装置、蒸汽式弹射装置以及弹簧弹射装置.
电磁弹射装置利用电磁力来弹射物体,该装置的推力大,也容易控制,但其对能量源要求较高,研发和制造成本较高,不够经济,而且还会对其他装置产生影响;液压式弹射装置利用储蓄器中的液压油驱动装置,使被弹射物被高速弹出,该装置的功率密度大,可以输出较大的力和力矩,但液压式弹射装置的控制十分复杂,其结构也复杂精密,增大了制造和维护成本,不利于复杂环境中应用;蒸汽式弹射装置利用蒸汽推动活塞弹射物体,该装置的能量大,但装置的体积较大.而且装置对热设计的要求十分高,常常用于航母等大型装置的弹射.
与其它的弹射装置不同,弹簧弹射装置具结构较为简单、应用范围广泛、制造和维护成本低廉的优势.但传统的弹簧弹射装置也有以下局限性:1)弹簧弹射难以控制,弹射方向单一且难以改变;2)一般只能实现单次弹射任务,在一次弹射完成后难以在短时间内进行下一次弹射;3)弹簧弹射还往往存在装置动力大小与体积的矛盾的问题:体积增大难以保证其便携性,而过小的体积往往又会存在动力不足的问题,这导致其难以应用于机器人在复杂崎岖环境中的工作和探索.
针对传统弹簧弹射装置存在的局限性,本发明设计出一款自动可循环弹射装置,该装置可以实现多次循环弹射的任务.
发明内容
针对上述提到的不足,本发明提出了一种自动可循环弹射装置,该装置仅需要远程控制电机18的转速,就可实现物体在指定方向弹射的距离.此外,若被弹射物体配上收线装置,已经被抛甩出去的物体又可在线的牵引下回到原抛出位置,实现物体的往返运动同时达到装置循环利用的效果.本发明主要包括了自动可循环弹射装置的机械结构设计和电控原理设计.具体技术方案如下:
自动可循环弹射装置的机械结构设计,主要包括滚珠丝杠3套装和弹射筒6,丝杠15通过联轴器17与和丝杠支撑座14与弹射筒6整体连接.其中,滚珠丝杠3套装包括丝杠15、丝杠支撑座14、丝杆螺母16和联轴器17,能够通过电机18带动联轴器17正反旋转带动丝杠螺母16的升降.弹射筒6部分包括喇叭口1、上底座2、下底座7、活动滑块4、固定楔面5和弹射筒6.
在上述的自动可循环弹射装置的机械结构设计中,所述的弹射筒6成喇叭形,上底座2整体呈圆弧状,活动滑块4在弹射筒6上下的移动被弹射物可以在动力弹簧8的作用下弹射到指定位置,弹射口内壁设置为喇叭形的目的是方便部分弹射物的回收.
其中,活动滑块4的设计细节丰富,活动滑块4的中部设有限位弹簧12,其目的是方便弹射物体上下移动时可以很好的与丝杠螺母16配合,从而起到固定限位的作用.在上述的远程可控开合钩爪的机械结构设计中,所述的活动滑块4主要包括上中下三个部分,其中中间部分是主体部分.活动滑块4上方部分主要起对弹射物体支撑和筒内固定的作用,中部设有两个小型限位弹簧12,在与外部丝杠15上丝杠螺母16接触挤压会压缩从而在水平方向上伸长或缩短,从而起限制位置的作用.下部分主要用于与动力弹簧8上端配合,从而为物体提供稳定均匀的推力.通过滑块三部分的相互配合,实现装置循环弹射的功能.
弹射物体时,动力弹簧8处于初始伸长状态.开始时电机18驱动丝杠15进行转动,安装在丝杠15上的丝杠螺母16在位移轨道19的限位作用下向上平移.上移至丝杠螺母16与弹簧滑扣11所伸出的斜面接触后,丝杠螺母16继续向上平移,通过压缩限位弹簧12将弹簧滑扣11压入活动滑块4内部,丝杠螺母16的矩形凸起向上进入弹簧滑扣11与活动滑块4上部之间的间隙后,弹簧滑扣11由于失去凸起的挤压而被探出回到原位.随后电机18开始反向转动,丝杠螺母16下行.此时由于丝杠螺母16凸起下方的弹簧滑扣11已经弹回原位,丝杠螺母16通过挤压弹簧滑扣11的上表面带动活动滑块4沿弹射筒6内壁一同向下移动.这一过程中活动滑块4抵抗动力弹簧8的弹力做功,动力弹簧8积攒弹性势能.当活动滑块4被压到弹射筒6中固定楔面5所安装的位置,弹簧滑扣11伸出的斜面与固定楔面5零件上伸入弹射筒6内位移轨道19中固定楔面5接触,此时装置蓄能达到最大.装置进行蓄能释放的过程中,丝杠螺母16继续由电机18控制下移,弹簧滑扣11在这一过程中被其挤压入活动滑块4内.当弹簧滑扣11上表面因向内被挤压而与丝杠螺母16脱离接触后,活动滑块4失去由滚珠丝杠3机构提供的下压力,动力弹簧8积蓄的弹性势能释放,活动滑块4携带其上表面所承载的被弹射物体被快速向弹射筒6上方弹射.活动滑块4因其两侧的延展结构接触到位移轨道19的上表面而停止移动,被弹射物体在此过程中被弹射出装置.
远程可控开合钩爪的电控原理设计,其特征在于,以微型锂电池作为供电来源,采用无线充电接收模块来为微型锂电池充电;电机18处于工作状态时,微型锂电池的电压通过升压模块升压稳定后来为无线遥控驱动模块提供电源,此时无线遥控驱动模块通过解析远程遥控器发出的指令,来控制电机18的正转和反转,从而活动滑块4的运动,以此来控制动力弹簧8的压缩与拉伸.
本发明自动可循环弹射装置的有益效果如下:1)该装置的结构较简单,装配制造难度低.弹射过程的完成仅由电机18的转速来运动控制,结构设计巧妙;2)由于活动滑块4中部滑块内置的小型限位弹簧12,通过活动滑块4中部的收缩解决了传统弹射无法进行连续多次弹射的功能,导致使用效率低、成本高的缺点.本设计增加了弹射装置在各项现实环境中使用时的便捷性和实用性;3)弹射装置的体积几乎完全由动力弹簧8的大小所决定,轻便易携.
附图说明
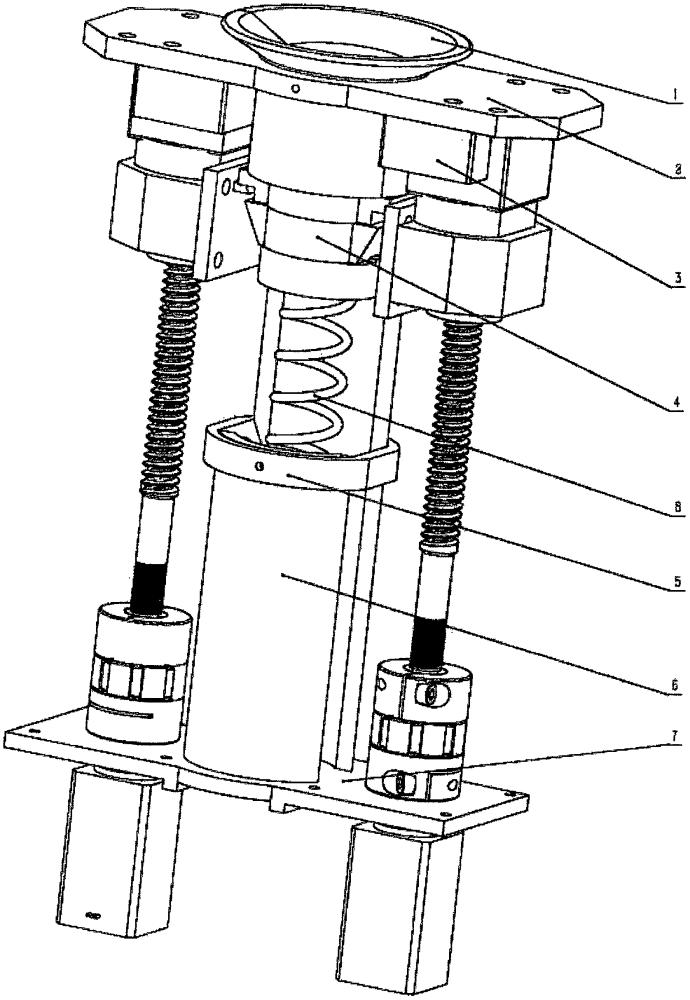
图1为本发明的自动可循环弹射装置(处于压缩状态)半剖面结构示意图;
图2为本发明的自动可循环弹射装置(处于拉伸状态)半剖面结构示意图;
图3为本发明的活动滑块工作面全剖面结构示意图;
图4为本发明的活动滑块爆炸图俯视视角结构示意图
图5为本发明的活动滑块爆炸图仰视视角结构示意图
图6为本发明的自动可循环弹射装置活动滑块结构示意图;
图7为本发明的自动可循环弹射装置丝杠模块结构示意图;
附图说明如下:
1.喇叭口 2.上底座 3.滚珠丝杠 4.活动滑块 5.固定楔面 6.弹射筒 7.下底座8.动力弹簧 9.活动滑块(上) 10.活动滑块(中) 11.弹簧滑扣 12.限位弹簧 13.活动滑块(下) 14.丝杠支撑座 15.丝杠 16.丝杠螺母 17.联轴器 18.电机 19.位移轨道
具体实施方式
下面结合附1图和实施例对本发明作进一步的详细说明.此处所描述的具体实施例方式仅用于解释本发明,并不用于限定本发明的保护范围.
本发明针对目前传统的弹簧弹射装置不利于控制、只能近距离弹射、弹射方向单一难以改变、动力不足难以满足一般弹射的距离要求等弊端,设计了一种自动可循环弹射装置,该弹射装置可以通过远程无线遥控的方式,操作滚珠丝杠3控制动力弹簧8的拉伸与压缩,将被弹射物从弹射筒6中弹出,从而完成循环可控的弹射的任务.
在复杂的生产生活环境,尤其是部分工程项目中需要使用自动可循环弹射装置,使用该自动可循环弹射装置代替传统弹射装置进行工作,可以很方便地解决传统弹簧弹射装置控制困难、应用范围窄、动力不足、具有潜在风险等问题,极大地提高了装置的适用性和安全性.
如图1所示,本发明的自动可循环弹射装置主要由1.喇叭口2.上底座3.滚珠丝杠4.活动滑块5.固定楔面6.弹射筒7.下底座8.动力弹簧9.活动滑块(上)10.活动滑块(中)11.弹簧滑扣12.限位弹簧13.活动滑块(下)14.丝杠支撑座15.丝杠16.丝杠螺母17.联轴器18.电机19.位移轨道.
滚珠丝杠3机构中,丝杠15通过联轴器17与电机18相嵌合,其中电机18与无线驱动模块、储能模块相连.丝杠15通过丝杠支撑座14与上底座2固定,电机18通过螺丝连接与下底座7固定.弹射筒6机构中,设有与产品性能要求相符的动力弹簧8和与其配套的活动滑块4.弹射筒6与下底座7通过螺栓连接.
喇叭口1设计成喇叭状,与下方弹射筒6成一体,内径随高度渐增,满足了特定场景下弹射物弹射与回收的要求.上底座2整体呈扁平状,中央留有圆形空缺与喇叭口1嵌合,下与丝杠支撑座14通过螺丝固定,起机构的支撑作用.
活动滑块4设计为三层结构.滑块上盖呈扁平,用于承载被弹射物,其两端的延展结构嵌套在弹射筒6壁两侧留出的位移轨道19中,使活动滑块4能够在弹射筒6内上下自由滑动.滑块中部内嵌两个相互独立的限位弹簧12与弹簧滑扣11相连,此外弹簧滑扣11上下两侧设有凹槽与滑块上下盖的凸起轨道相配合,限位弹簧12与上下轨道共同对弹簧滑扣11起到限位作用.活动滑块4下层呈扁平,其底部留有与动力弹簧8尺寸相符的圆柱形凹槽,用于固定动力弹簧8的上端.
位移轨道19是在弹射筒6壁上纵向挖出的两条对称空槽.轨道的两侧平面互相平行,作用为限制活动滑块4与丝杠螺母16的水平位移,使其在弹射筒6内只能由动力弹簧8所驱动,作纵向位移.位移轨道19的长度决定了动力弹簧8驱动活动滑块4的位移大小,从而决定了该装置的弹射能力.该轨道的上限位置由弹射筒6零件的固有形状决定,下限位置则取决于固定楔面5在弹射筒6上的安装位置.
固定楔面5是一个中空的圆环结构,通过螺丝固定在弹射筒6外壁.在圆环结构上对应位移轨道19的位置,存在向弹射筒6内侧延展的固定固定楔面结构,用于压缩在活动滑块4中安装的弹簧滑扣11.固定楔面5安装的位置决定了位移轨道19的有效长度,因此可根据装置的实际性能要求灵活调整固定楔面5在弹射筒6外壁上的安装位置.
丝杠螺母16与丝杠15通过螺纹连接,在面向弹射筒6的一侧,丝杠螺母16伸出矩形凸起进入位移轨道19,矩形延展的宽度与位移轨道19的宽度吻合,使丝杠螺母16能够沿位移轨道19纵向移动.
滑块底座设有凹槽固定动力弹簧8上端,控制动力弹簧8弹射方向.固定楔面5设在弹射套筒上端,内设固定楔面5,与弹簧滑扣11相配合,通过弹簧滑扣11与丝杠螺母16的分离释放动力弹簧8实现弹射.弹射筒6固定在底座上端,内置动力弹簧8,实现预期的弹射路径.
在弹射装置的底座中部有一固定圆柱,防止动力弹簧8的不规则形变,提高动力弹簧8使用效率.底座两端固定滚珠丝杠3的联轴器17.
本段将对弹射装置完整的工作周期进行描述:在上一次弹射动作执行后,动力弹簧8处于初始伸长状态,将活动滑块4推至位移轨道19的上限位置.装置进行蓄能的过程中,由电机18驱动丝杠15进行转动,安装在丝杠15上的丝杠螺母16在位移轨道19的限位作用下向上平移.上移至丝杠螺母16与弹簧滑扣11所伸出的斜面接触后,丝杠螺母16继续向上平移,通过压缩限位弹簧12将弹簧滑扣11压入活动滑块4内部,丝杠螺母16的矩形凸起向上进入弹簧滑扣11与活动滑块4上部之间的间隙后,弹簧滑扣11由于失去凸起的挤压而被探出回到原位.随后电机18开始反向转动,丝杠螺母16下行.此时由于丝杠螺母16凸起下方的弹簧滑扣11已经弹回原位,丝杠螺母16通过挤压弹簧滑扣11的上表面带动活动滑块4沿弹射筒6内壁一同向下移动.这一过程中活动滑块4抵抗动力弹簧8的弹力做功,动力弹簧8积攒弹性势能.与当活动滑块4被压到弹射筒6中固定楔面5所安装的位置,弹簧滑扣11伸出的斜面与固定楔面5零件上伸入弹射筒6内位移轨道19中固定楔面5接触,此时装置蓄能达到最大.装置进行蓄能释放的过程中,丝杠螺母16继续由电机18控制下移,弹簧滑扣11在这一过程中被其挤压入活动滑块4内.当弹簧滑扣11上表面因向内被挤压而与丝杠螺母16脱离接触后,活动滑块4失去由滚珠丝杠3机构提供的下压力,动力弹簧8积蓄的弹性势能释放,活动滑块4携带其上表面所承载的被弹射物体被快速向弹射筒6上方弹射.活动滑块4因其两侧的延展结构接触到位移轨道19的上表面而停止移动,被弹射物体在此过程中被弹射出装置.以上为该装置的一个完整工作周期.
如图2所示为本发明的自动可循环弹射装置动力弹簧8处于伸长状态部分剖面结构示意图,如图1所示为本发明的自动可循环弹射装置动力弹簧8处于压缩状态部分剖面结构示意图,如图3所示为本发明的自动可循环弹射装置活动滑块4整体结构示意图.下面详述该自动可循环弹射装置功能实现过程的具体工作原理.自动可循环弹射装置弹射过程:起初自动可循环弹射装置处于如图2所示的状态,自动可循环弹射装置的无线遥控驱动模块收到遥控器发来的“弹射”指令后,电机18带动联轴器17控制丝杠螺母16下降,带动弹簧滑扣11压缩动力弹簧8移动到固定楔面5所固定的最低位置.弹簧滑扣11内部限位弹簧12受压收缩,使得弹簧滑扣11沿固定楔面5向内压缩直至与丝杠螺母16分离,此时处于压缩状态的动力弹簧8受外部弹射筒6与内部圆柱的约束垂直伸长,将弹性势能转化为推块的动能,驱动活动滑块4沿弹射筒6轨道快速上升将被弹射物体按照预期方向弹出筒外.此时发出“复原”指令,电机18反转带动联轴器17逆向旋转将丝杠螺母16上升,挤压弹簧滑扣11越过滑块直至丝杠15顶部,为下一次弹簧弹射做准备.
如图6所示为本发明的自动可循环弹射装置电控原理示意图,以一具体实例阐述说明.以24V交流电源作为自动可循环弹射装置的供电来源,采用5V的无线充电发射模块来为自动可循环弹射装置的无线充电接收模块进行电能传输.采用3.7V微型锂电池作为自动可循环弹射装置的供电来源.通过远程遥控,当自动可循环弹射装置处于工作状态时,微型锂电池的输出电压通过升压模块升压稳定后来为无线遥控驱动模块提供12V电源.此时无线遥控驱动模块通过解析远程遥控器发出的指令,来控制电机18的正转或者反转带动联轴器17驱使丝杠螺母16升降,从而达到多次弹射的效果.
下面实例详细说明自动可循环弹射装置的应用,以捕物网释放和回收这一实际场景,利用多个循环弹射装置协同工作为例辅助说明.首先,将捕物网四角作为被弹射物固定在装置上,通过程序同时控制多个弹射装置的弹射方向,并利用远程遥控选择弹射的距离和时间,待调整好相关的参数后发出弹射的指令,电机18带动联轴器17控制丝杠螺母16下降,带动弹簧滑扣11压缩动力弹簧8移动到固定楔面5所固定的最低位置,弹簧滑扣11内部限位弹簧12受压收缩,使得弹簧滑扣11沿固定楔面5向内压缩直至与丝杠螺母16分离.在动力弹簧8压缩到最低位置后,处于压缩状态的动力弹簧8受外部弹射筒6与内部圆柱的约束垂直伸长,将弹性势能转化为推块的动能,驱动活动滑块4沿弹射筒6轨道快速上升并将捕物网的四角按照预期方向弹出筒外,捕获目标物体.再与收放线装置配合,程序发出回收指令,电机18反转,将捕物网回收,实现多次循环释放.
综上所述,本发明专利针对传统的弹簧弹射装置应用范围窄、无法实现多次弹射、弹射方向单一、动力不足难以控制等问题.提供了一种自动可循环弹射装置.利用此发明,人或智能机器人在使用该装置高效完成相应的弹射任务,并且也可以和收放线装置配合使用,很方便地将弹射物收回.上述的实施方式并非是对本发明使用范围的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的技术方案范围内所做出的变化、改型、添加或替换,也均属于本发明的保护范围。