一种北斗导航电动遥控秸秆粉碎残膜回收机
文献发布时间:2024-01-17 01:24:51
技术领域
本发明涉及一种残膜回收机,特别涉及一种北斗导航电动遥控秸秆粉碎残膜回收机,属于农业机械技术领域。
背景技术
农业机械是指在作物种植业和畜牧业生产过程中,以及农、畜产品初加工和处理过程中所使用的各种机械。农业机械包括农用动力机械、农田建设机械、土壤耕作机械、种植和施肥机械、植物保护机械、农田排灌机械、作物收获机械、农产品加工机械、畜牧业机械和农业运输机械等。
广义的农业机械还包括林业机械、渔业机械和蚕桑、养蜂、食用菌类培植等农村副业机械。农业机械属于相对概念,指用于农业、畜牧业、林业和渔业所有机械的总称,农业机械属于农机具的范畴。推广使用农业机械称为农业机械化。
地膜覆盖种植技术给农田带来保温保墒、促进早发根早生长、节水防旱、减少养分流失、抑制杂草生长、增产等诸多优点,因此地膜覆盖种植面积逐年递增,尤其是棉花、花生、玉米地的地膜覆盖面积;但地膜覆盖种植技术使农田增产的同时也造成了环境污染、土质板结、退化、影响下一年种植等新的问题,因此农田残膜的处理回收尤为重要;
目前已有的残膜回收机对玉米茬的回收效果不是很理想,小块残膜拾取不净,残膜与玉米根茎混合一起,未达到完全分离的效果,并且残膜与玉米根茎作为垃圾需要大量人工二次收集运输处理,增加了不必要的劳动力。
发明内容
本发明的目的在于提供一种北斗导航电动遥控秸秆粉碎残膜回收机,以解决上述背景技术中提出的小块残膜拾取不净,残膜与玉米根茎混合一起,未达到完全分离的效果的问题。
为实现上述目的,本发明提供如下技术方案:一种北斗导航电动遥控秸秆粉碎残膜回收机,包括车架,所述车架的两侧均通过连接轴转动连接有车轮,所述车架前端的顶部固定设有两个第一横梁,所述车架的前端设有起膜组件,所述车架两侧的顶端均固定设有第二横梁,两个所述第二横梁的顶端设有驱动组件,所述车架的内部设有第一传送带和第二传送带,且第一传送带倾斜设置,两个所述第二横梁的顶端固定设有吸附箱,所述吸附箱的内部设有高负压吸附风机,且位于第二传送带的上方,两个所述第二横梁顶端的边侧设有粉碎组件。
优选的,所述起膜组件包括铲刀、四个圆形切刀、齿钩和六棱卷轴,所述铲刀固定设置在车架前端的底部,四个所述圆形切刀均通过立柱固定安装在两个第一横梁的底部,所述六棱卷轴转动设置在车架的前端,所述六棱卷轴的表面固定设有若干个齿钩。
优选的,所述驱动组件包括传动电机、变速箱和转动轴,所述传动电机和变速箱分别固定设置在两个第一横梁的顶端,所述传动电机与变速箱之间通过齿轮进行啮合连接,所述转动轴设置在变速箱的传动轴上,所述转动轴的一端固定设有两个第一传动链轮。
优选的,两个所述第二横梁的一侧均固定设有控制箱,两个所述控制箱的内部设有北斗导航装置,所述北斗导航装置包括前轮角度传感器、电机控制器、电池组、信号接收器、视频显示终端、前轮驱动电机、RTK规划模块、摄像头、4/5G模块和北斗导航系统,所述前轮角度传感器与摄像头位于其中一个第一横梁的一侧,所述信号接收器与视频显示终端均位于其中一个控制箱的内部,所述电机控制器与电池组均固定安装在另一个控制箱的内部;
优选的,所述车架的前端固定设有两个前轮驱动电机,两个所述前轮驱动电机与其中位于前端的两个连接轴通过齿轮啮合配合。
优选的,所述粉碎组件包括锤片和锤片轴,所述锤片轴转动设置在第二横梁的顶端,所述锤片轴的表面固定设有若干个锤片,且所述锤片轴的上方设有透明材质制成的防护罩。
优选的,所述六棱卷轴的一端以及锤片轴的一端均固定设有第二链轮,两个所述第二链轮与两个第一链轮之间均传动连接有传动链条。
与相关技术相比较,本发明提供的一种北斗导航电动遥控秸秆粉碎残膜回收机具有如下有益效果:
1、通过北斗导航装置对残膜回收机的行进路线进行规划,通过电机控制器控制前轮驱动电机转速和转向,进而控制残膜回收机的前进后退和差速转向,不需要农机牵引节省机械传动部件和安装空间,简化传动链提高整机工作效率和可靠性;
2、通过设置的六棱卷轴和高负压吸附风机两次对残膜的拾取,拾取彻底从而解决了残膜回收困难造成的环境污染、土质板结、退化、影响下一年种植的问题;
3、通过第一传动带和第二传送带将秸秆、玉米根茎等传送至粉碎组件将秸秆、玉米根茎等粉碎并通过锤片高速旋转将粉碎的秸秆、玉米根茎均匀抛洒入地中,实现资源回收利用。
附图说明
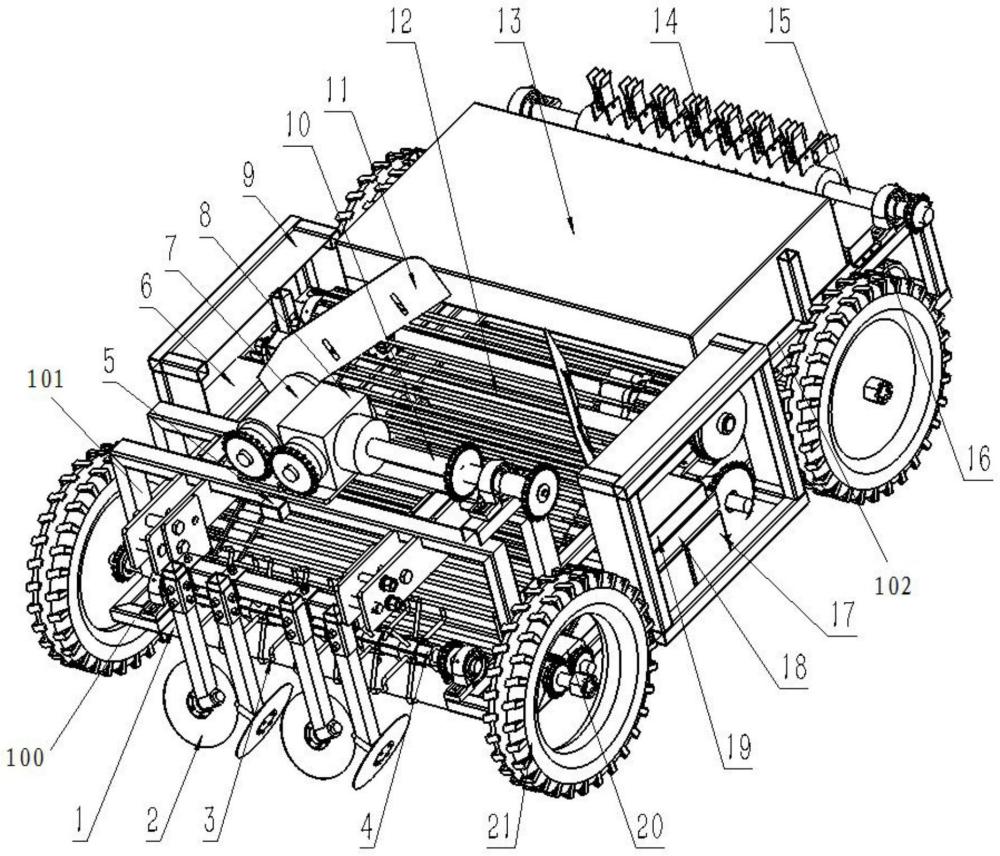
图1为本发明的结构示意图;
图2为本发明六棱卷轴的结构示意图;
图3为本发明锤片轴的结构示意图;
图4为本发明北斗导航装置的系统结构图。
图中:1、铲刀;2、切刀;3、齿钩;4、六棱卷轴;5、前轮角度传感器;6、电机控制器;7、传动电机;8、变速箱;9、控制箱;10、转动轴;11、挡板;12、第一传送带;13、吸附箱;14、锤片;15、锤片轴;16、第二传送带;17、电池组;18、信号接收器;19、视频显示终端;20、前轮驱动电机;21、车轮;100、车架;101、第一横梁;102、第二横梁。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1:
请参阅图1-4,本发明提供了一种北斗导航电动遥控秸秆粉碎残膜回收机,包括车架100,车架100的两侧均通过连接轴转动连接有车轮21,车架100前端的顶部固定设有两个第一横梁101,车架100的前端设有起膜组件,车架100两侧的顶端均固定设有第二横梁102,两个第二横梁102的顶端设有驱动组件,车架100的内部设有第一传送带12和第二传送带16,且第一传送带12倾斜设置,两个第二横梁102的顶端固定设有吸附箱13,吸附箱13的内部设有高负压吸附风机,且位于第二传送带16的上方,两个第二横梁102顶端的边侧设有粉碎组件;
两个第二横梁102的另一侧均固定设有挡板12,且位于第一传送带16的上方;
车架100的前端固定设有两个前轮驱动电机20,两个前轮驱动电机20与其中位于前端的两个连接轴通过齿轮啮合配合;
起膜组件包括铲刀1、四个圆形切刀2、齿钩3和六棱卷轴4,铲刀1固定设置在车架100前端的底部,四个圆形切刀2均通过立柱固定安装在两个第一横梁101的底部,六棱卷轴4转动设置在车架100的前端,六棱卷轴4的表面固定设有若干个齿钩3;
驱动组件包括传动电机7、变速箱8和转动轴10,传动电机7和变速箱8分别固定设置在两个第一横梁101的顶端,传动电机7与变速箱8之间通过齿轮进行啮合连接,转动轴10设置在变速箱8的传动轴上,转动轴10的一端固定设有两个第一传动链轮;
粉碎组件包括锤片14和锤片轴15,锤片轴15转动设置在第二横梁102的顶端,锤片轴15的表面固定设有若干个锤片14,且锤片轴15的上方设有透明材质制成的防护罩;
六棱卷轴4的一端以及锤片轴15的一端均固定设有第二链轮,两个第二链轮与两个第一链轮之间均传动连接有传动链条;
具体的,如图1、图2、图3所示,首先根据不同地茬调节铲刀1高度,通过调节铲刀1入土高度来调节铲土量,铲刀1入土过深铲土量过多则不利于膜土分离,铲刀1入土过浅则不利于膜的拾取,接着启动传动电机7,在第一链轮、第二链轮和链条的传动配合下带动六棱卷轴4和锤片轴15进行同步转动,切刀2将埋在土壤中的地膜进行切割,有利于膜土分离,铲刀1用于将土壤、残膜和农作物秸秆根茎铲起,铲刀1上方的六棱卷轴4转动,六棱卷轴4上的齿钩3从土壤中将残膜钩起并缠绕在六棱卷轴4上,使残膜初次从土壤中被拾取,通过粉碎组件上的锤片14高速旋转将土块和农作物秸秆根茎粉碎回田。
实施例2:
两个第二横梁102的一侧均固定设有控制箱9,两个控制箱9的内部设有北斗导航装置,北斗导航装置包括前轮角度传感器5、电机控制器6、电池组17、信号接收器18、视频显示终端19、前轮驱动电机20、RTK规划模块、摄像头、4/5G模块和北斗导航系统,前轮角度传感器5与摄像头位于其中一个第一横梁101的一侧,信号接收器18与视频显示终端19均位于其中一个控制箱9的内部,电机控制器6与电池组17均固定安装在另一个控制箱9的内部;
具体的,如图1、图4所示,首先通过北斗导航系统对残膜回收机的行进路线进行规划,然后通过电机控制器6控制前轮驱动电机20的转速和转向和传动电机7的转速,进而控制残膜回收机的前进后退和差速转向。
工作原理:使用本装置时,首先通过北斗导航系统对残膜回收机的行进路线进行规划,通过电机控制器6控制前轮驱动电机20的转速和转向,进而控制残膜回收机的前进后退和差速转向,根据不同地茬调节铲刀1高度,通过调节铲刀1入土高度来调节铲土量,铲刀1入土过深铲土量过多则不利于膜土分离,铲刀1入土过浅则不利于膜的拾取,接着启动传动电机7,在第一链轮、第二链轮和链条的传动配合下带动六棱卷轴4和锤片轴15进行同步转动,切刀2将埋在土壤中的地膜进行切割,有利于膜土分离,铲刀1用于将土壤、残膜和农作物秸秆根茎铲起,铲刀1上方的六棱卷轴4转动,六棱卷轴4上的齿钩3从土壤中将残膜钩起并缠绕在六棱卷轴4上,使残膜初次从土壤中被拾取,第一传送带12将齿钩3未钩起的小块零碎残膜、土壤和农作物秸秆根茎传送至第二传送带16,大部分土壤从第一传送带12和第二传送带16上的缝隙筛漏,剩余小块零碎残膜、土块农作物秸秆根茎经第二传送带16传送,经过第二传送带16上方的高负压吸附风机对小块零碎残膜进行二次吸附拾取,并将未筛漏的土块和农作物秸秆根茎传送至粉碎组件,通过粉碎组件上的锤片14高速旋转将土块和农作物秸秆根茎粉碎回田。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。