一种用于跨坐式单轨观光车的牵引系统
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及观光车牵引系统技术领域,具体为一种用于跨坐式单轨观光车的牵引系统。
背景技术
跨坐式单轨观光车是属于区域用电动车的一种,可分为旅游观光车,小区看房车,电动老爷车,小型尔夫车,是种专为旅游景区、花园式酒店、度假村、公园、大型游乐园、封闭社区、学校代步专用的环保型电动乘用车辆。电动观光车整车驱动主要是由电机驱动系统将电能转化为机械能,这样也就决定了电动观光车的性能。
现有的跨坐式单轨观光车大部分是直流电机驱动,但是许多景区因地理问题,许多地方都需要爬坡,选用直流电机时,不能瞬时提高转速,提高爬坡能力,所以电机工程师们研究出了交流电机,但是全部采用交流电机使用的话,交流电机的启动性和调速性较差,所以在牵引工作中,如何将直流电机和交流电机进行配合使用,是对牵引系统控制起到重大的作用。
发明内容
本发明提供了一种用于跨坐式单轨观光车的牵引系统,具备在景区单轨上自动化进行牵引调速和切换直流电和交流电的自动转换,且具备全程监控安全和提醒有益效果,解决了上述背景技术中所提到在牵引工作中,如何将直流电机和交流电机进行配合使用的问题。
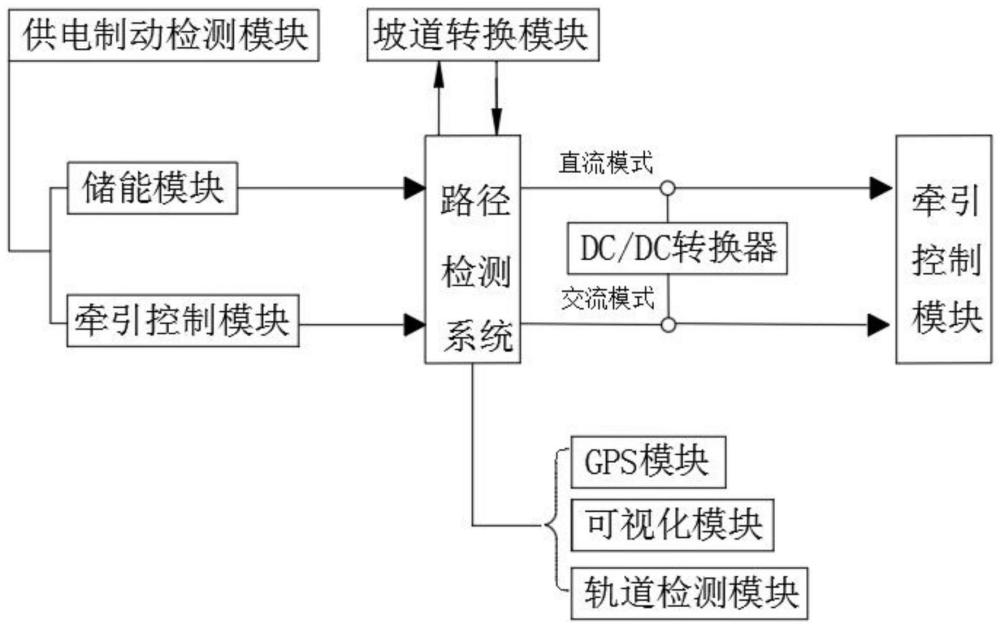
本发明提供如下技术方案:一种用于跨坐式单轨观光车的牵引系统,包括供电制动检测模块、路径监测系统、单轨接触网和无线通信模块;
所述供电制动检测模块包括储能模块和牵引控制模块,所述储能模块,其用于提供直流电,并通过DC/DC转换器向牵引控制模块输入电能;所述DC/DC转换器变换电路连接在所述储能模块与整流逆变电路之间,用于对所述储能模块提供的直流电进行变换或是对所述整流逆变电路传输来的直流电进行变换;
所述储能模块和供电制动检测模块相连,供电制动检测模块与单轨接触网相连接,所述供电制动检测模块用于将DC1500V改为AC1500V;所述供电制动检测模块包括直流电DC模式和交流电AC模式;
供电制动检测模块包括坡道转换模块,坡道转换模块用于在单轨观光车在运行过程中,对轨道上的坡度进行路径标识坡度段,所述路径标识坡度段设置有三种模式,爬坡模式、平坡模式和下坡减速模式;所述平坡模式其用于在单轨观光车在平坡或≤15%≤36%爬坡度,采用直流电模式进行牵引供电运行;所述爬坡模式其用于在单轨观光车在爬坡度高于36%坡度时,当前直流电模式DC1500V改为AC1500V的交流电进行爬坡;所述下坡减速模块其用于在下坡过程中减速牵引的速度到不超过10Km/h。
作为本发明所述一种用于跨坐式单轨观光车的牵引系统的一种可选方案,其中:所述路径监测系统包括轨道检测模块、GPS模块和可视化模块,所述轨道检测模块和GPS模块与无线通信模块相连接;
所述可视化模块用于在整个单轨线路的过程中,观光车和轨道上的标记通过三维画面可视化显示在车载运控模块的导航系统中
所述轨道检测模块用于对轨道上的“转弯处”、“超高处”、“爬坡处”、“下坡处”进行检测和标记,由可视化模块在车载运控模块的导航系统中进行可视化的标记;
所述GPS模块用于将观光车的高精度无线电导航定位位置,显示在车载运控模块的导航系统中作为主要标记。
作为本发明所述一种用于跨坐式单轨观光车的牵引系统的一种可选方案,其中:所述可视化模块包括提醒模块,所述提醒模块用于蜂鸣播放器和语音播放器;
提醒模块在接近单轨轨道上的“转弯处”、“超高处”、“爬坡处”、“下坡处”前10M-20M时,进行峰鸣播放器和语音播放器的语音或峰鸣提醒播放。
作为本发明所述一种用于跨坐式单轨观光车的牵引系统的一种可选方案,其中:所述牵引控制模块包括转弯减速单元、下坡减速单元和超高限速单元;
所述转弯减速单元用于在收到“转弯”检测信号时,发送信号至牵引控制模块,进而控制VCU控制器进行驱动控制,包括加减速、恒速、制动的工况;
所述下坡减速单元用于收到“下坡”检测信号时,发送信号至牵引控制模块,进而控制VCU控制器进行驱动控制,包括加减速、恒速、制动的工况;
所述超高限速单元用于收到“超高”检测信号时,发送信号至牵引控制模块,进而控制VCU控制器进行驱动控制,包括加减速、恒速、制动的工况。
作为本发明所述一种用于跨坐式单轨观光车的牵引系统的一种可选方案,其中:所述牵引控制模块还包括电力驱动系统包括受电弓、变压器、牵引变流器、牵引电机、联轴节、齿轮箱、车抽和车轮等组件。
一种用于跨坐式单轨观光车的牵引系统,还包括监控模块,所述监控模块其用于对供电制动检测模块和路径监测系统中的电气装置和机械装置进行实时监控;
所述监控模块包括电流输出监测模块和故障模块;
所述电流输出监测模块用于对直流电模式和交流电模式切换的过程中进行电流检测和包括对储能模块中的蓄电池组进行电压的实时监控;
所述故障模块用于对制动装置、ATO装置、电子设备和机械设备进行故障监控,当监测到故障情况的时候,实时进行报警处理。
作为本发明所述一种用于跨坐式单轨观光车的牵引系统的一种可选方案,其中:所述故障模块监测到故障事件时,判断牵引控制模块是否允许控制开关控制,所述牵引控制模块根据故障事件判断是否允许控制牵引控制模块选择开关的闭合或断开工作。
作为本发明所述一种用于跨坐式单轨观光车的牵引系统的一种可选方案,其中:所述牵引控制模块包括双制动单元,在观光车在下坡行驶时,可以实现双制动功能。
作为本发明所述一种用于跨坐式单轨观光车的牵引系统的一种可选方案,其中:所述供电制动检测模块在观光车正常运行时,电流输出监测模块监测到供电模式,判断是否为直流模式供电,若供电模式是直流模式,在爬坡中需要更改至交流模式供电时,则通过直流电动机、机械传动到交流发电机发出交流电;
其中,逆变是与整流相反的电流转换过程,将直流电转换为交流电;当逆变侧即交流测接在电网中时,则为有源逆变,当逆变侧即交流测直接与负载相连时,称为无源逆变;
逆变电路可以在控制电路的作用下将直流电源转换为任意频率和电压的交流电,需要直流电源向交流负载供电时,调整电流开关的开合来并通过控制开关切换周期来改变输出交流电的频率。
作为本发明所述一种用于跨坐式单轨观光车的牵引系统的一种可选方案,其中:所述储能模块中的电能计算转化为续航里程,并将续航里程数发送至电流输出监测模块。
本发明具备以下有益效果:
1、该一种用于跨坐式单轨观光车的牵引系统,对于单轨的路径路况实时检测之后,储能模块用于对牵引控制模块提供电能,并通过DC/DC转换器将直流电改为交流电,再改为直流电的电能转换,便于在平坡的过程中采用直流电模式,爬坡时切换交流电模式,实现交流电和直流电全自动转换,进而减少直流电和交流电的弊端,很好地将直流电机和交流电机的优势发挥出来,不仅提高了牵引的效率,且节约了一定的成本。
2、该一种用于跨坐式单轨观光车的牵引系统,通过路径监测系统对整个单轨轨道进行监测后,实时将轨道上的“转弯处”、“超高处”、“爬坡处”、“下坡处”进行检测和标记,智能识别并传输到牵引控制模块,便于切换直流电和交流电模式,实现交流电和直流电全自动转换,提高牵引使用动力的智能性。
3、该一种用于跨坐式单轨观光车的牵引系统,通过可视化模块的提醒模块对于接近单轨轨道上“转弯处”、“超高处”、“爬坡处”、“下坡处”前10M-20M时进行语音和蜂鸣提醒,不仅在后台可视化能清楚地显示,且对于牵引系统自动或者让工作人员进行手动切换调速。
附图说明
图1为本发明结构流程示意图。
图2为本发明结构牵引控制模块流程示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
跨坐式单轨观光车是属于区域用电动车的一种,可分为旅游观光车,小区看房车,电动老爷车,小型尔夫车,是种专为旅游景区、花园式酒店、度假村、公园、大型游乐园、封闭社区、学校代步专用的环保型电动乘用车辆。电动观光车整车驱动主要是由电机驱动系统将电能转化为机械能,这样也就决定了电动观光车的性能。
现有的跨坐式单轨观光车大部分是直流电机驱动,但是许多景区因地理问题,许多地方都需要爬坡,选用直流电机时,不能瞬时提高转速,提高爬坡能力,所以电机工程师们研究出了交流电机,但是全部采用交流电机使用的话,交流电机的启动性和调速性较差,所以在牵引工作中,如何将直流电机和交流电机进行配合使用,是对牵引系统控制起到重大的作用。
本发明提供如下技术方案:一种用于跨坐式单轨观光车的牵引系统,请参阅图1-图2,包括供电制动检测模块、路径监测系统、单轨接触网和无线通信模块;
所述供电制动检测模块包括储能模块和牵引控制模块,所述储能模块,其用于提供直流电,并通过DC/DC转换器向牵引控制模块输入电能;所述DC/DC转换器变换电路连接在所述储能模块与整流逆变电路之间,用于对所述储能模块提供的直流电进行变换或是对所述整流逆变电路传输来的直流电进行变换;
所述储能模块和供电制动检测模块相连,供电制动检测模块与单轨接触网相连接,所述供电制动检测模块用于将DC1500V改为AC1500V;所述供电制动检测模块包括直流电DC模式和交流电AC模式;
供电制动检测模块包括坡道转换模块,坡道转换模块用于在单轨观光车在运行过程中,对轨道上的坡度进行路径标识坡度段,所述路径标识坡度段设置有三种模式,爬坡模式、平坡模式和下坡减速模式;所述平坡模式其用于在单轨观光车在平坡或≤15%≤36%爬坡度,采用直流电模式进行牵引供电运行;所述爬坡模式其用于在单轨观光车在爬坡度高于36%坡度时,当前直流电模式DC1500V改为AC1500V的交流电进行爬坡;所述下坡减速模块其用于在下坡过程中减速牵引的速度到不超过10Km/h。
其中:所述供电制动检测模块在观光车正常运行时,电流输出监测模块监测到供电模式,判断是否为直流模式供电,若供电模式是直流模式,在爬坡中需要更改至交流模式供电时,则通过直流电动机、机械传动到交流发电机发出交流电;
其中,逆变是与整流相反的电流转换过程,将直流电转换为交流电;当逆变侧即交流测接在电网中时,则为有源逆变,当逆变侧即交流测直接与负载相连时,称为无源逆变;
逆变电路可以在控制电路的作用下将直流电源转换为任意频率和电压的交流电,需要直流电源向交流负载供电时,调整电流开关的开合来并通过控制开关切换周期来改变输出交流电的频率。
本实施例中,对于单轨的路径路况实时检测之后,储能模块用于对牵引控制模块提供电能,并通过DC/DC转换器将直流电改为交流电,再改为直流电的电能转换,便于在平坡的过程中采用直流电模式,爬坡时切换交流电模式,实现交流电和直流电全自动转换,进而减少直流电和交流电的弊端,很好地将直流电机和交流电机的优势发挥出来,不仅提高了牵引的效率,且节约了一定的成本。
实施例2
本实施例是在实施例1的基础上做出的解释说明,具体的,请参阅图1-图2,其中:所述路径监测系统包括轨道检测模块、GPS模块和可视化模块,所述轨道检测模块和GPS模块与无线通信模块相连接;
所述可视化模块用于在整个单轨线路的过程中,观光车和轨道上的标记通过三维画面可视化显示在车载运控模块的导航系统中;
所述轨道检测模块用于对轨道上的“转弯处”、“超高处”、“爬坡处”、“下坡处”进行检测和标记,由可视化模块在车载运控模块的导航系统中进行可视化的标记;
所述GPS模块用于将观光车的高精度无线电导航定位位置,显示在车载运控模块的导航系统中作为主要标记。
所述储能模块中的电能计算转化为续航里程,并将续航里程数发送至电流输出监测模块。
本实施例中,通过路径监测系统对整个单轨轨道进行监测后,实时将轨道上的“转弯处”、“超高处”、“爬坡处”、“下坡处”进行检测和标记,智能识别并传输到牵引控制模块,便于切换直流电和交流电模式,实现交流电和直流电全自动转换,提高牵引使用动力的智能性。
实施例3
本实施例是在实施例1的基础上做出的解释说明,具体的,请参阅图1-图2,其中:所述可视化模块包括提醒模块,所述提醒模块用于蜂鸣播放器和语音播放器;
提醒模块在接近单轨轨道上的“转弯处”、“超高处”、“爬坡处”、“下坡处”前10M-20M时,进行峰鸣播放器和语音播放器的语音或峰鸣提醒播放。
其中:所述牵引控制模块包括转弯减速单元、下坡减速单元和超高限速单元;
所述转弯减速单元用于在收到“转弯”检测信号时,发送信号至牵引控制模块,进而控制VCU控制器进行驱动控制,包括加减速、恒速、制动的工况;
所述下坡减速单元用于收到“下坡”检测信号时,发送信号至牵引控制模块,进而控制VCU控制器进行驱动控制,包括加减速、恒速、制动的工况;
所述超高限速单元用于收到“超高”检测信号时,发送信号至牵引控制模块,进而控制VCU控制器进行驱动控制,包括加减速、恒速、制动的工况。
本实施例中,通过可视化模块的提醒模块对于接近单轨轨道上“转弯处”、“超高处”、“爬坡处”、“下坡处”前10M-20M时进行语音和蜂鸣提醒,不仅在后台可视化能清楚地显示,且对于牵引系统也能准确地让工作人员进行手动切换调速。
实施例4
本实施例是在实施例1的基础上做出的解释说明,具体的,请参阅图1-图2,其中:所述牵引控制模块还包括电力驱动系统包括受电弓、变压器、牵引变流器、牵引电机、联轴节、齿轮箱、车抽和车轮等组件。
所述牵引系统的组成交流牵引控制主要包括以下几个部件:受流装置,高速断路器,牵引逆变器,牵引电机,制动电阻;
受电弓从单轨接触网受流,通过高速断路器、线路接.触器、接地检测装置后,将1500VDC送入MCM(牵引电机控制模块)电机转换模块上,逆变成频率电压可调的三相交流电,平行供给车辆4台交流鼠笼式异步牵引电机,实现对电机的调速,完成列车牵引、电制动功能。
一种用于跨坐式单轨观光车的牵引系统,还包括监控模块,所述监控模块其用于对供电制动检测模块和路径监测系统中的电气装置和机械装置进行实时监控;
所述监控模块包括电流输出监测模块和故障模块;
所述电流输出监测模块用于对直流电模式和交流电模式切换的过程中进行电流检测和包括对储能模块中的蓄电池组进行电压的实时监控;
所述故障模块用于对制动装置、ATO装置、电子设备和机械设备进行故障监控,当监测到故障情况的时候,实时进行报警处理。
其中:所述故障模块监测到故障事件时,判断牵引控制模块是否允许控制开关控制,所述牵引控制模块根据故障事件判断是否允许控制牵引控制模块选择开关的闭合或断开工作。
本实施例中,通过电流输出监测模块和故障模块对牵引系统中的电气装置、机械设备和制动装置、ATO装置、电子设备和机械设备进行故障监控,当监测到故障情况的时候,实时进行报警处理,提高安全性能。
实施例5
本实施例是在实施例1的基础上做出的解释说明,具体的,请参阅图1-图2,其中:所述牵引控制模块包括双制动单元,在观光车在下坡行驶时,可以实现双制动功能。
本实施例中,通过牵引控制模块中的双制动单元在观光车下坡行驶过程中,实现双制动功能,便于快速减速。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。