一种变电站弹射驱鸟机器人
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及变电站安全防护技术领域,尤其涉及一种变电站弹射驱鸟机器人。
背景技术
鸟害故障作为变电站常见的故障类型,其不仅会对电力网络的正常运行产生影响,同时也会促使电力部门产生不必要的财力、物力与人力损失。因此,驱鸟工作成为变电站建设与后期运维中的重点,对整个电网运行的稳定性与安全性都能够产生重要的影响。鸟害已到了非治理不可的地步,目前驱鸟装置有物理驱鸟和化学驱鸟,如超声波驱鸟,模拟天敌声音驱鸟,超声波驱鸟会对鸟兽造成物理伤害,而模拟天敌鸟兽会产生适应性,无法长期驱鸟。
为此,提出一种变电站弹射驱鸟机器人。
发明内容
本发明的目的在于提供一种变电站弹射驱鸟机器人,通过发射弹射球,以赶走鸟类或驱散鸟群,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种变电站弹射驱鸟机器人,包括转运装置和弹射装置,所述转运装置上方固定设置有固定座,所述固定座上方固定连接着弹射装置,所述转运装置内部设置有控制模块,所述弹射装置内部设置有弹射球。
优选的,所述转运装置包括底座与转动轮,所述底座的内部设置有驱动模块,所述转动轮转动连接在驱动模块上,所述转动轮采用麦克纳姆轮,用于使设备实现全方位移动。
优选的,所述弹射装置包括角度调节装置、发射装置、蓄能装置和发射筒,所述角度调节装置包括角度调节电机、角度调节齿轮组,调节安装板和连接板,所述调节安装板固定连接在固定座上,所述角度调节电机转动连接在调节安装板上,所述角度调节齿轮组包括齿轮一、齿轮二,所述齿轮一固定连接在角度调节电机的输出轴上,所述齿轮二转动连接在调节安装板上,且齿轮二与齿轮一相互齿轮啮合,所述齿轮二远离调节安装板的一端固定连接有连接板,所述连接板远离齿轮二的一端固定安装有蓄能装置。
优选的,所述蓄能装置包括固定支座,所述固定支座的一端固定连接着发射筒,所述固定支座的内部滑动连接有推杆,所述推杆延伸至发射筒内部,所述推杆远离发射筒的一端设置有蓄能弹簧,所述蓄能弹簧的一端固定连接在固定支座上,另一端固定连接在推杆上,所述推杆的上端固定连接有发射扳机,所述发射扳机与发射装置连接。
优选的,所述发射装置包括发射电机、发射带轮组、发射安装板和发射拨叉,所述发射安装板固定连接在发射筒远离角度调节装置的一端,所述发射安装板上固定连接有发射电机,所述发射带轮组包括驱动轮和从动轮,所述驱动轮固定连接在发射电机的输出端,所述从动轮的轮毂处固定安装有从动轴,所述从动轴转动连接在发射安装板上,所述驱动轮与从动轮采用同步传送带连接,所述从动轮的一端非圆心位置固定安装有发射拨叉,所述发射拨叉延伸至发射扳机处且与发射扳机接触。
优选的,所述弹射球为空心,且弹射球内部的中央设有拉杆,所述拉杆滑动连接在弹射球内,且另一端延伸至弹射球外部,所述弹射球的外壳采用叶瓣结构,且所述弹射球外壳的每个叶瓣内壁上设置有卡块,所述拉杆在弹射球内壁的一端设置有圆槽,每个所述卡块在弹射球外壁合上后能够被圆槽限位。
优选的,所述弹射球外可的每个叶瓣均固定安装有展开弹簧,每个所述展开弹簧的另一端固定安装在拉杆上。
优选的,所述转运装置的后侧设置有回收装置,所述回收装置包括电动绞盘和缆绳,所述电动绞盘固定连接在转运装置的后侧,所述缆绳缠绕在电动绞盘上,所述缆绳的一端延伸至发射筒内部并于所述弹射球的拉杆在弹射球外部的一端固定连接,缆绳能够拉动拉杆在弹射球内滑动。
与现有技术相比,本发明的有益效果为:
1、本发明的一种变电站弹射驱鸟机器人,通过发射弹射球,以赶走鸟类或驱散鸟群,达到不伤害鸟类的安全驱鸟,同时可快速调整发射位置以及发射角度,可实现多角度驱鸟,保障变电站的正常工作。
2、本发明的一种变电站弹射驱鸟机器人,通过回收装置,在进行工作以后可以自动回收,并且快速达到待命状态,可迅速进行多次驱鸟。
3、本发明的一种变电站弹射驱鸟机器人,通过设置麦克纳姆轮,用于使设备实现全方位移动,同时设有控制模块,可以进行编程,达到自动化驱鸟。
附图说明
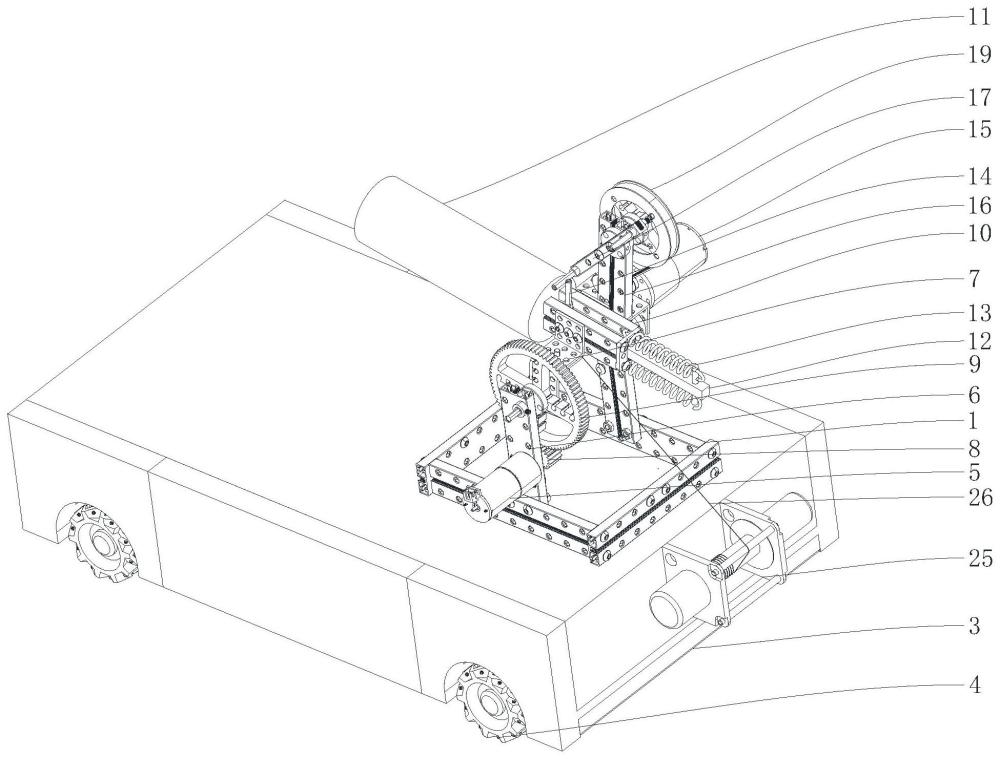
图1示出了本发明提供的一种变电站弹射驱鸟机器人结构示意图;
图2示出了本发明提供的一种变电站弹射驱鸟机器人飞行状态正视图;
图3示出了本发明提供的一种变电站变电站弹射驱鸟机器人俯视图;
图4示出了本发明提供的一种变电站变电站弹射驱鸟机器人侧视图;
图5示出了本发明提供的一种发射装置结构示意图;
图6示出了本发明提供的一种储能装置结构示意图;
图7示出了本发明提供的一种弹射球收缩状态结构示意图;
图8示出了本发明提供的一种弹射球展开结构示意图。
图中:1、固定座;2、弹射球;3、底座;4、转动轮;5、角度调节电机;6、调节安装板;7、连接板;8、齿轮一;9、齿轮二;10、固定支座;11、发射筒;12、推杆;13、蓄能弹簧;14、发射扳机;15、发射电机;16、发射安装板;17、发射拨叉;18、驱动轮;19、从动轮;20、从动轴;21、拉杆;22、卡块;23、圆槽;24、展开弹簧;25、电动绞盘;26、缆绳。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要理解的是,术语"中心"、"纵向"、"横向"、"长度"、"宽度"、"厚度"、"上"、"下"、"前"、"后"、"左"、"右"、"坚直"、"水平"、"顶"、"底"、"内"、"外"、"顺时针"、"逆时针"等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语"第一"、"第二"仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有"第一"、"第二"的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明的描述中,"多个"的含义是两个或两个以上,除非另有明确具体的限定。此外,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
请参阅图1至图8,本发明提供一种变电站弹射驱鸟机器人,技术方案如下:
一种变电站弹射驱鸟机器人,包括转运装置和弹射装置,转运装置上方固定设置有固定座1,固定座1上方固定连接着弹射装置,转运装置内部设置有控制模块,弹射装置内部设置有弹射球2。
变电站弹射驱鸟机器人一般设置在变电站附近,用于驱逐靠近变电站的鸟群,已达到保护变电站的目的,使用时,现利用转运装置将变电站弹射驱鸟机器人放置在变电站附近,控制模块包括微型处理器,主要用于控制转运装置与弹射装置的运作,可以设置红外传感器或小型雷达等信息采集设备,判断鸟群的方位与数量,再由控制模块进行计算运动轨迹,并且控制弹射装置对准鸟群的行进方向,并且在鸟群经过时发射弹射球2,弹射球2弹出将鸟群驱散,从而保护变电站不会鸟群入侵,同时可以在控制模块上设定巡航路线,让设备在变电站附近巡逻,以防变电站阻挡鸟群入侵方向。
作为本发明的一种实施方式,参照图1,转运装置包括底座3与转动轮4,底座3的内部设置有驱动模块,转动轮4转动连接在驱动模块上,转动轮4采用麦克纳姆轮,用于使设备实现全方位移动。
本实施例采用麦克纳姆轮由轮毂、辊子、减震环构成,与转运装置的底座3相连,4个麦克纳姆轮加以组合,可以使转运车实现全方位移动,该方式可以快速、灵活地控制设备的移动,驱动模块用于带动麦克纳姆轮的转动,由控制模块控制。
作为本发明的一种实施方式,参照图1,弹射装置包括角度调节装置、发射装置、蓄能装置和发射筒11,角度调节装置包括角度调节电机5、角度调节齿轮组,调节安装板6和连接板7,调节安装板6固定连接在固定座1上,角度调节电机5转动连接在调节安装板6上,角度调节齿轮组包括齿轮一8、齿轮二9,齿轮一8固定连接在角度调节电机5的输出轴上,齿轮二9转动连接在调节安装板6上,且齿轮二9与齿轮一8相互齿轮啮合,齿轮二9远离调节安装板6的一端固定连接有连接板7,连接板7远离齿轮二9的一端固定安装有蓄能装置。
角度调节装置用于调整发射筒11的俯仰角,需要调整时,控制模块控制着角度调节电机5转动,角度调节点击通过角度调节齿轮组,带动连接板7从而带动发射筒11沿着齿轮二9的轴心转动,以改变发射筒11的仰角,在本实施例中,控制模块通过红外传感器或小型雷达等信息采集设备,判断鸟群的方位,利用麦克纳姆轮与角度调节装置的配合,在利用设备的巡逻机制,可以在天上任何方位的鸟群入侵时感应并且使发射筒11快速地对准鸟群飞行方向,发射弹射球2驱散鸟群,保护变电站不会鸟群入侵。
作为本发明的一种实施方式,参照图1,蓄能装置包括固定支座10,固定支座10的一端固定连接着发射筒11,固定支座10的内部滑动连接有推杆12,推杆12延伸至发射筒11内部,推杆12远离发射筒11的一端设置有蓄能弹簧13,蓄能弹簧13的一端固定连接在固定支座10上,另一端固定连接在推杆12上,推杆12的上端固定连接有发射扳机14,发射扳机14与发射装置连接。发射装置包括发射电机15、发射带轮组、发射安装板16和发射拨叉17,发射安装板16固定连接在发射筒11远离角度调节装置的一端,发射安装板16上固定连接有发射电机15,发射带轮组包括驱动轮18和从动轮19,驱动轮18固定连接在发射电机15的输出端,从动轮19的轮毂处固定安装有从动轴20,从动轴20转动连接在发射安装板16上,驱动轮18与从动轮19采用同步传送带连接,从动轮19的一端非圆心位置固定安装有发射拨叉17,发射拨叉17延伸至发射扳机14处且与发射扳机14接触。
发射电机15转动带动驱动轮18转动,通过同步传送带带动从动轮19转动,固定在从动轮19上的发射拨叉17也随之转动,从而带动发射扳机14移动,当发射拨叉17从靠近发射筒11的一端转动到远离发射筒11的一端时,发射扳机14达到最大移动距离,此时蓄能弹簧13被拉到最长,当发射筒11对准鸟群飞行方向时,发射电机15接受到控制模块下发的发射命令后,发射电机15会迅速转动带动发射拨叉17从远离发射筒11的一端转动到靠近发射筒11的一端,推杆12在蓄能弹簧13的作用下迅速沿着固定支座10向发射筒11方向移动,在发射筒11内的弹射球2受到推杆12给予的动能后从发射筒11射出,鸟群受到惊吓后散开,保护变电站不会鸟群入侵。
作为本发明的一种实施方式,参照图1,弹射球2为空心,且弹射球2内部的中央设有拉杆21,拉杆21滑动连接在弹射球2内,且另一端延伸至弹射球2外部,弹射球2的外壳采用叶瓣结构,且弹射球2外壳的每个叶瓣内壁上设置有卡块22,拉杆21在弹射球2内壁的一端设置有圆槽23,每个卡块22在弹射球2外壁合上后能够被圆槽23限位。弹射球2外可的每个叶瓣均固定安装有展开弹簧24,每个展开弹簧24的另一端固定安装在拉杆21上。转运装置的后侧设置有回收装置,回收装置包括电动绞盘25和缆绳26,电动绞盘25固定连接在转运装置的后侧,缆绳26缠绕在电动绞盘25上,缆绳26的一端延伸至发射筒11内部并于弹射球2的拉杆21在弹射球2外部的一端固定连接,缆绳26能够拉动拉杆21在弹射球2内滑动。
电动绞盘25不设有反向自锁,当弹射球2发射时,弹射球2带动缆绳26延伸同时电动绞盘25在反向转动使得缠绕在电动绞盘25上的缆绳26不断解放,当缆绳26延伸至最长时,弹射球2还由于惯性的作用有一个继续运动的趋势,此时缆绳26会对弹射球2中央的拉杆21有个沿着缆绳26方向的拉力,拉杆21相对于弹射球2的其他部分向缆绳26方向运动,拉杆21一端的圆槽23也随之脱离卡块22的接触,卡块22将不会被圆槽23限位,在展开弹簧24的作用下将叶瓣结构打开,在鸟群的视角里弹射球2在他们面前起到炸开的效果,使得鸟群的惊吓度提高,增加了鸟群散开的效率,当需要回收弹射球2时,电动绞盘25旋转带动缆绳26缠绕在电动绞盘25上,弹射球2在缆绳26的拉力下最终回到发射筒11内,弹射球2进入发射筒11时,发射筒11入口处的内壁会将打开的叶瓣结构缩回,在拉杆21内部设置有回复结构例如弹簧,当缆绳26的拉力取消后拉杆21在回复结构的作用下回复到初始状态,重新与卡块22配合限位,此时发射电机15带动推杆12沿着固定支座10向远离发射筒11的方向移动,蓄能弹簧13拉长,设备处于待命状态。
该文中出现的电器元件均通过变压器与外界的主控器及220V市电电连接,并且主控器可为计算机等起到控制的常规已知设备,本发明所提供的产品型号只是为本技术方案依据产品的结构特征进行的使用,其产品会在购买后进行调整与改造,使之更加匹配和符合本发明所属技术方案,其为本技术方案一个最佳应用的技术方案,其产品的型号可以依据其需要的技术参数进行替换和改造,其为本领域所属技术人员所熟知的,因此,本领域所属技术人员可以清楚的通过本发明所提供的技术方案得到对应的使用效果。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。