一种机械手、机械手自动校准装置及方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及半导体制造技术领域,尤其涉及机械手、机械手自动校准装置及方法。
背景技术
在晶圆的生产加工过程中,机械手抓取晶圆时,由于晶圆盒类型、尺寸差异,或者机械手示教位置偏差等,存在机械手撞断、晶圆损伤等风险。但是在相关技术中,对机械手校准操作是在设备调试阶段进行的,无法实现生产过程中机械手自动校准,而且无法同时兼容不同晶圆盒差异或者机械手示教位置偏差等问题,无法彻底解决生产中机械手撞断、晶圆损伤等风险。
发明内容
本公开实施例目的在于提供一种机械手、机械手自动校准装置及方法,能够在生产过程中实现对机械手自动校准,同时兼容不同晶圆盒差异、或者机械手示教位置偏差等问题,降低机械手撞断、晶圆损伤等风险。
本公开实施例所提供的技术方案如下:
一种机械手,包括:
用于承载晶圆的承载主体,所述承载主体包括基部、及连接至所述基部上间隔设置的第一臂部和第二臂部;
移动所述承载主体的移动组件;及
感应器,所述感应器包括设置于所述第一臂部的发射端、及设置于所述第二臂部的接收端,所述发射端用于向所述接收端发射沿第一水平方向传输的光束,所述接收端用于根据光束被所述晶圆遮挡情况产生相应感应信号。
示例性的,所述第一臂部和所述第二臂部分别包括在所述第一水平方向上彼此相对的内侧面,所述发射端设置在所述第一臂部的所述内侧面上,所述接收端设置在所述第二臂部的所述内侧面上。
一种机械手自动校准装置,用于在晶圆加工过程中进行机械手自动校准;所述机械手自动校准装置包括:
机械手,所述机械手包括:用于承载晶圆的承载主体;所述承载主体包括基部、及连接至所述基部上隔开设置的第一臂部和第二臂部;移动所述承载主体的移动组件;及感应器,所述感应器包括设置于所述第一臂部的发射端、及设置于所述第二臂部上的接收端,所述发射端用于向所述接收端发射沿第一水平方向传输的光束,所述接收端用于根据光束被所述晶圆遮挡情况产生相应感应信号;及
控制器,所述控制器与所述感应器、所述移动组件连接,用于根据预定策略控制所述移动组件移动所述机械手,并根据所述机械手移动过程中所述接收端所反馈的感应信号,判断所述机械手的位置,并校准所述机械手在三维方向上的位置,所述三维方向包括水平方向和竖直方向,所述水平方向包括彼此垂直的所述第一水平方向和第二水平方向。
示例性的,所述晶圆沿竖直方向分层设置在晶圆盒内;
所述控制器包括:
第一控制模块,与所述移动组件连接,用于控制所述机械手沿竖直方向从第一位置向第二位置移动,所述机械手处于所述第一位置时在所述竖直方向上位于所述晶圆盒内最顶层晶圆的正上方,所述机械手处于所述第二位置时在所述竖直方向上位于所述晶圆盒内最底层晶圆的正下方;
第一处理模块,与所述感应器连接,用于根据所述机械手从所述第一位置向所述第二位置移动过程中所述接收端所反馈的感应信号,记录所述晶圆盒内各层晶圆在所述竖直方向上的位置。
示例性的,所述控制器还包括:
第二控制模块,与所述移动组件和所述第一处理模块连接,用于控制所述机械手沿所述竖直方向上升至第三位置,所述第三位置为所述最底层晶圆所在的竖直方向上的位置,以校准所述机械手在所述竖直方向上的位置。
示例性的,所述控制器还包括:
第三控制模块,与所述移动组件连接,用于控制所述机械手从所述第三位置沿所述第二水平方向朝向第四位置平移,其中所述机械手处于所述第四位置时所述机械手位于所述晶圆盒沿所述第二水平方向上的外侧;
第二处理模块,与所述感应器连接,用于根据所述机械手从所述第三位置向所述第四位置移动过程中所述接收端所反馈的感应信号,记录所述最底层晶圆在所述第二水平方向上的边缘位置。
示例性的,所述控制器还包括:
第四控制模块,与所述移动组件和所述第一处理模块连接,用于控制所述机械手沿所述第二水平方向移动至所述边缘位置,以校准所述机械手在所述水平方向上的位置。
一种机械手自动校准方法,采用如上所述的机械手自动校准装置在晶圆加工过程中进行机械手自动校准进行机械手校准,所述方法包括如下步骤:
根据预定策略,控制所述机械手移动;
根据所述机械手移动过程中所述感应器的感应信号,判断所述机械手的位置,并校准所述机械手在三维方向上的位置,所述三维方向包括水平方向和竖直方向,所述水平方向包括彼此垂直的所述第一水平方向和第二水平方向。
示例性的,所述方法具体包括:
控制所述机械手沿竖直方向从第一位置向第二位置移动,所述机械手处于所述第一位置时在所述竖直方向上位于所述晶圆盒内最顶层晶圆的正上方,所述机械手处于所述第二位置时在所述竖直方向上位于所述晶圆盒内最底层晶圆的正下方;
根据所述机械手从所述第一位置向所述第二位置移动过程中所述接收端所反馈的感应信号,记录所述晶圆盒内各层晶圆在所述竖直方向上的位置;
控制所述机械手沿所述竖直方向上升至第三位置,所述第三位置为所述最底层晶圆所在的竖直方向上的位置,以校准所述机械手在所述竖直方向上的位置。
示例性的,所述方法具体还包括:
控制所述机械手从所述第三位置沿所述第二水平方向朝向第四位置平移,其中所述机械手处于所述第四位置时所述机械手位于所述晶圆盒沿所述第二水平方向上的外侧;
根据所述机械手从所述第三位置向所述第四位置移动过程中所述接收端所反馈的感应信号,记录所述最底层晶圆在所述第二水平方向上的边缘位置;
控制所述机械手沿所述第二水平方向移动至所述边缘位置,以校准所述机械手在所述水平方向上的位置。
本公开实施例所带来的有益效果如下:
本公开实施例所提供的机械手、机械手自动校准装置及方法,在机械手的两个臂部上分别设置感应器的发射端和接收端,发射端发射的水平光束可被接收端接收,当晶圆置于两个臂部之间时,可通过晶圆是否遮挡光束可判断晶圆的位置,从而,可根据预定策略来移动机械手,根据感应器的感应信号来记录机械手的水平和竖直位置,实现晶圆生产过程中完成机械手的自动校准,以适用于不同类型晶圆盒的上载,确保了晶圆和机械手的安全。该装置结构简单,成本低,可靠性强。
附图说明
图1表示本公开实施例提供的机械手的结构示意图;
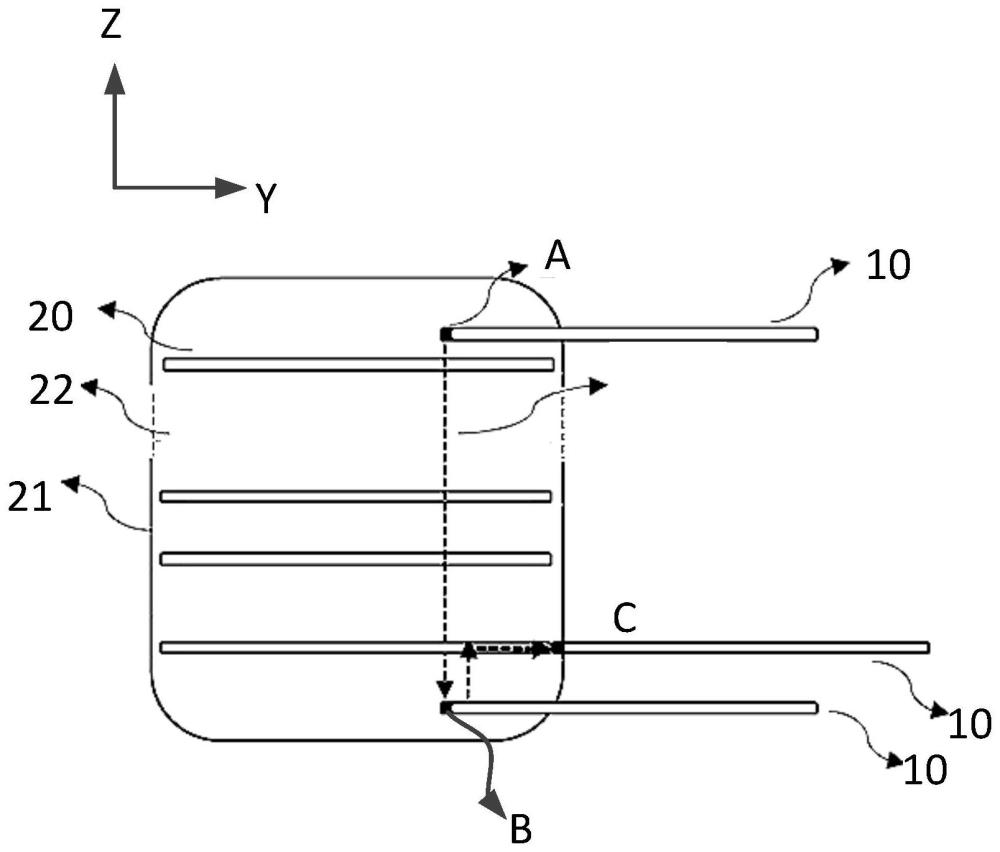
图2表示本公开实施例提供的机械手自动校准装置的校准过程示意图;
图3表示本公开实施例提供的机械手自动校准装置中控制器的结构框图。
具体实施方式
为使本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例的附图,对本公开实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本公开的一部分实施例,而不是全部的实施例。基于所描述的本公开的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本公开保护的范围。
除非另外定义,本公开使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”、“一”或者“该”等类似词语也不表示数量限制,而是表示存在至少一个。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
如图1和图2所示,本公开实施例提供了一种机械手,所述机械手10包括:
用于承载晶圆20的承载主体11,所述承载主体11包括基部111、及连接至所述基部111上且沿第一水平方向X间隔开设置的第一臂部112和第二臂部113;
移动所述承载主体11的移动组件(图中未示意);及
感应器12,所述感应器12包括设置于所述第一臂部112的发射端121、及设置于所述第二臂部113上的接收端122,所述发射端121用于向所述接收端122发射沿第一水平方向X传输的光束,所述接收端122用于根据光束被所述晶圆20遮挡情况产生相应感应信号。
在上述方案中,在机械手10的第一臂部112和第二臂部113上分别设置感应器12的发射端121和接收端122,其中发射端121可向接收端122发射沿第一水平方向X传输的光束,第一臂部112和第二臂部113可在所述第一水平方向X上间隔开设置。
当晶圆20置于第一臂部112和第二臂部113之间且发射端121所发射的光束与晶圆20处于竖直方向上的同一水平面上时,若发射端121所发射的光束被晶圆20遮挡,则接收端122不能接收到光束,从而感应器12可产生第一感应信号,若发射端121所发射的光束未被晶圆20遮挡,则接收端122可接收到光束,从而感应器12可产生第二感应信号。由此若在第二水平方向上平移机械手10,则可根据感应器12的感应信号变化来判断出晶圆20在水平方向上的边缘位置。
同样的,当机械手10沿着竖直方向Z上从晶圆20的正上方向晶圆20的正下方升降时,若发射端121所发射的光束被晶圆20遮挡,则接收端122不能接收到光束,从而感应器12可产生第一感应信号,若发射端121所发射的光束未被晶圆20遮挡,则接收端122可接收到光束,从而感应器12可产生第二感应信号。由此,若在竖直方向Z上升降机械手10,则可根据感应器12的感应信号变化来判断出晶圆20在竖直方向Z上的位置。
从而,按照预定策略在水平方向和竖直方向Z上来移动机械手10时,可根据感应器12的感应信号来判断晶圆20的位置,以此来对机械手10的位置进行自动校准,从而实现在晶圆20生产过程中对机械手10进行自动校准的目的,可兼容不同晶圆盒21或者机械手10示意位置偏差等问题,降低机械手10撞断、晶圆20损伤等风险。
作为一种示例性的实施,所述第一臂部112和所述第二臂部113分别包括在所述第一水平方向X上彼此相对的内侧面,所述发射端121设置在所述第一臂部112的所述内侧面上,所述接收端122设置在所述第二臂部113的所述内侧面上。
此外,本公开实施例还提供了一种机械手10自动校准装置,用于在晶圆20加工过程中进行机械手10自动校准。
如图1和图3所示,所述机械手10自动校准装置包括:
机械手10,所述机械手10包括:用于承载晶圆20的承载主体11;所述承载主体11包括基部111、及连接至所述基部111上隔开设置的第一臂部112和第二臂部113;移动所述承载主体11的移动组件;及感应器12,所述感应器12包括设置于所述第一臂部112的发射端121、及设置于所述第二臂部113上的接收端122,所述发射端121用于向所述接收端122发射沿第一水平方向X传输的光束,所述接收端122用于根据光束被所述晶圆20遮挡情况产生相应感应信号;及
控制器30,所述控制器30与所述感应器12、所述移动组件连接,用于根据预定策略控制所述移动组件移动所述机械手10,并根据所述机械手10移动过程中所述接收端122所反馈的感应信号,判断所述机械手10的位置,并校准所述机械手10在三维方向上的位置,所述三维方向包括水平方向和竖直方向Z,所述水平方向包括彼此垂直的所述第一水平方向X和第二水平方向Y。
在上述方案中,在机械手10的第一臂部112和第二臂部113上分别设置感应器12的发射端121和接收端122,其中发射端121可向接收端122发射沿第一水平方向X传输的光束,第一臂部112和第二臂部113可在所述第一水平方向X上间隔开设置。
当晶圆20置于第一臂部112和第二臂部113之间且发射端121所发射的光束与晶圆20处于竖直方向Z上的同一水平面上时,若发射端121所发射的光束被晶圆20遮挡,则接收端122不能接收到光束,从而感应器12可产生第一感应信号,若发射端121所发射的光束未被晶圆20遮挡,则接收端122可接收到光束,从而感应器12可产生第二感应信号。由此若在第二水平方向Y上平移机械手10,则可根据感应器12的感应信号变化来判断出晶圆20在水平方向上的边缘位置。
同样的,当机械手10沿着竖直方向Z上从晶圆20的正上方向晶圆20的正下方升降时,若发射端121所发射的光束被晶圆20遮挡,则接收端122不能接收到光束,从而感应器12可产生第一感应信号,若发射端121所发射的光束未被晶圆20遮挡,则接收端122可接收到光束,从而感应器12可产生第二感应信号。由此,若在竖直方向Z上升降机械手10,则可根据感应器12的感应信号变化来判断出晶圆20在竖直方向Z上的位置。
作为一种示例性的实施例,如图2所示,所述晶圆20沿竖直方向Z分层设置在晶圆盒21内,其中晶体盒21上具有卡槽22,用于承载晶圆20。
如图2和图3所示,所述控制器30包括:
第一控制模块31,与所述移动组件40连接,用于控制所述机械手10沿竖直方向Z从第一位置A向第二位置B移动,所述机械手10处于所述第一位置A时在所述竖直方向Z上位于所述晶圆盒21内最顶层晶圆20的正上方,所述机械手10处于所述第二位置B时在所述竖直方向Z上位于所述晶圆盒21内最底层晶圆20的正下方;
第一处理模块32,与所述感应器12连接,用于根据所述机械手10从所述第一位置A向所述第二位置B移动过程中所述接收端122所反馈的感应信号,记录所述晶圆盒21内各层晶圆20在所述竖直方向Z上的位置。
在上述方案中,可控制机械手10从第一位置A向第二位置B沿竖直方向Z移动,即,机械手10从最顶层晶圆20的正上方向最底层晶圆20的正下方移动,在这整个移动过程中,机械手10经过晶圆20时,感应器12会自动感应到晶圆20,并将感应信号反馈至第一处理模块32,第一处理模块32则记录下各层晶圆20在竖直方向Z上的位置,根据各层晶圆20在竖直方向Z上的位置,可对机械手10竖直方向Z上的位置进行自动校准。
具体而言,一些实施例中,所述控制器30还包括:第二控制模块33,与所述移动组件40和所述第一处理模块32连接,用于控制所述机械手10沿所述竖直方向Z上升至第三位置C,所述第三位置C为所述最底层晶圆20所在的竖直方向Z上的位置,以校准所述机械手10在所述竖直方向Z上的位置。
在上述方案中,通过将机械手10沿竖直方向Z移动至最底层晶圆20所在的竖直方向Z上的位置来对机械手10竖直方向Z上位置进行校准。应当理解的是,在其他实施例中,也可以是根据任一层晶圆20的竖直方向Z上的位置来校准机械手10。
此外,在一些示例性的实施例中,如图2和图3所示,所述控制器30还包括:
第三控制模块34,与所述移动组件40连接,用于控制所述机械手10从所述第三位置C沿所述第二水平方向Y朝向第四位置平移,其中所述机械手10处于所述第四位置时所述机械手10位于所述晶圆盒21沿所述第二水平方向Y上的外侧;
第二处理模块35,与所述感应器12连接,用于根据所述机械手10从所述第三位置C向所述第四位置移动过程中所述接收端122所反馈的感应信号,记录所述最底层晶圆20在所述第二水平方向Y上的边缘位置。
在上述方案中,可控制机械手10从第三位置C向第四位置沿第二水平方向Y移动,即,机械手10从最底层晶圆20的正上方向最底层晶圆20的外侧平移,在这整个平移过程中,机械手10经过晶圆20时,感应器12会自动感应到晶圆20,并将感应信号反馈至第二处理模块,第二处理模块则记录下各层晶圆20在第二水平方向Y上的边缘位置,根据晶圆20在第二水平方向Y上的边缘位置,可对机械手10水平方向上的位置进行自动校准。
具体而言,如图2和图3所示,所述控制器30还包括:
第四控制模块36,与所述移动组件40和所述第二处理模块35连接,用于控制所述机械手10沿所述第二水平方向Y移动至所述边缘位置,以校准所述机械手10在所述水平方向上的位置。
在上述方案中,通过将机械手10沿第二水平方向Y平移至最底层晶圆20的外侧,来对机械手10第二水平方向Y上位置进行校准。应当理解的是,在其他实施例中,也可以是根据任一层晶圆20的第二水平方向Y上的位置来校准机械手10。
由以上方案可知,机械手10的自动校准可不受限于晶圆20尺寸,兼容不同晶圆盒21差异或者机械手10示教位置偏差,可在晶圆20生产过程中实现机械手10的自动校准。
此外,本公开实施例还提供了一种机械手10自动校准方法,采用本公开实施例所提供的机械手10自动校准装置在晶圆20加工过程中进行机械手10自动校准进行机械手10校准,所述方法包括如下步骤:
根据预定策略,控制所述机械手10移动;
根据所述机械手10移动过程中所述感应器12的感应信号,判断所述机械手10的位置,并校准所述机械手10在三维方向上的位置。
示例性的,所述方法具体包括:
步骤S01、控制所述机械手10沿竖直方向Z从第一位置A向第二位置B移动,所述机械手10处于所述第一位置A时在所述竖直方向Z上位于所述晶圆盒21内最顶层晶圆20的正上方,所述机械手10处于所述第二位置B时在所述竖直方向Z上位于所述晶圆盒21内最底层晶圆20的正下方;
步骤S02、根据所述机械手10从所述第一位置A向所述第二位置B移动过程中所述接收端122所反馈的感应信号,记录所述晶圆盒21内各层晶圆20在所述竖直方向Z上的位置;
步骤S03、控制所述机械手10沿所述竖直方向Z上升至第三位置C,所述第三位置C为所述最底层晶圆20所在的竖直方向Z上的位置,以校准所述机械手10在所述竖直方向Z上的位置。
在上述方案中,可控制机械手10从第一位置A向第二位置B沿竖直方向Z移动,即,机械手10从最顶层晶圆20的正上方向最底层晶圆20的正下方移动,在这整个移动过程中,机械手10经过晶圆20时,感应器12会自动感应到晶圆20,并将感应信号反馈至第一处理模块32,第一处理模块32则记录下各层晶圆20在竖直方向Z上的位置,根据各层晶圆20在竖直方向Z上的位置,可对机械手10竖直方向Z上的位置进行自动校准。
具体而言,一些实施例中,通过将机械手10沿竖直方向Z移动至最底层晶圆20所在的竖直方向Z上的位置来对机械手10竖直方向Z上位置进行校准。应当理解的是,在其他实施例中,也可以是根据任一层晶圆20的竖直方向Z上的位置来校准机械手10。
示例性的,所述方法具体还包括:
步骤S04、控制所述机械手10从所述第三位置C沿所述第二水平方向Y朝向第四位置平移,其中所述机械手10处于所述第四位置时所述机械手10位于所述晶圆盒21沿所述第二水平方向Y上的外侧;
步骤S05、根据所述机械手10从所述第三位置C向所述第四位置移动过程中所述接收端122所反馈的感应信号,记录所述最底层晶圆20在所述第二水平方向Y上的边缘位置;
步骤S06、控制所述机械手10沿所述第二水平方向Y移动至所述边缘位置,以校准所述机械手10在所述水平方向上的位置。
在上述方案中,可控制机械手10从第三位置C向第四位置沿第二水平方向Y移动,即,机械手10从最底层晶圆20的正上方向最底层晶圆20的外侧平移,在这整个平移过程中,机械手10经过晶圆20时,感应器12会自动感应到晶圆20,并将感应信号反馈至第二处理模块,第二处理模块则记录下各层晶圆20在第二水平方向Y上的边缘位置,根据晶圆20在第二水平方向Y上的边缘位置,可对机械手10水平方向上的位置进行自动校准。
具体而言,通过将机械手10沿第二水平方向Y平移至最底层晶圆20的外侧,来对机械手10第二水平方向Y上位置进行校准。应当理解的是,在其他实施例中,也可以是根据任一层晶圆20的第二水平方向Y上的位置来校准机械手10。
由以上方案可知,机械手10的自动校准可不受限于晶圆20尺寸,兼容不同晶圆盒21差异或者机械手10示教位置偏差,可在晶圆20生产过程中实现机械手10的自动校准。
有以下几点需要说明:
(1)本公开实施例附图只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计。
(2)为了清晰起见,在用于描述本公开的实施例的附图中,层或区域的厚度被放大或缩小,即这些附图并非按照实际的比例绘制。可以理解,当诸如层、膜、区域或基板之类的元件被称作位于另一元件“上”或“下”时,该元件可以“直接”位于另一元件“上”或“下”或者可以存在中间元件。
(3)在不冲突的情况下,本公开的实施例及实施例中的特征可以相互组合以得到新的实施例。
以上,仅为本公开的具体实施方式,但本公开的保护范围并不局限于此,本公开的保护范围应以权利要求的保护范围为准。