一种监护应急抢救无接触转移装置
文献发布时间:2024-01-17 01:27:33
技术领域
本发明属于医疗器械技术领域,特别是涉及一种监护应急抢救无接触转移装置。
背景技术
医疗器械是作用于人们进行疾病的预防、治疗、康复时所使用的仪器、设备、器具等,病床作为医疗器械的一种,是供病人提供睡卧的平台,而在儿科急诊治疗时,对于较为严重的疾病,病人通常是躺在病床上进行诊断的,而需要对病人推进手术室进行抢救时,为了降低对病人进行转移的二次损伤,人们使用重症监护应急转移装置使得在转移需要抢救的病人时实现无接触转移。
经检索,申请公布号CN115300279A,申请公布日2022.11.08公开了一种重症监护应急转移装置,包括主床板和分离床板,所述分离床板的上表面固定连接有床垫,所述主床板的上表面两侧均设置有用以使分离床板沿其宽边方向移动拆分的滑动连接件,所述主床板的四角均设置有用以将分离床板固定在其上方的插接组件。通过设置的传动辊筒、传动带、挂孔、连接绳、挂钩和缓速电机,能够通过将挂钩挂在挂孔中,随后通过缓速电机带动一侧传动辊筒转动,该侧传动辊筒通过与另一侧的传动辊筒配合,从而带动传动带的转动,同时通过挂钩和连接绳带动分离床板向主床板上方平移,避免通过人力进行搬运,整个平移过程省时省力,不与患者的肢体接触,且十分稳定,避免出现肢体的二次损伤。
但是现有的技术存在以下的不足:
1、现有技术在使用时,需要操作挂钩与挂孔相连才能进行床板的转移,同时采用传送带转移后还需人工操作分离床板进行彻底对位,使用不便;
2、现有技术在分离床板实现对位后需要操作四个插接组件进行分离床板的固定,操作较为麻烦。
因此,现有技术在使用时,需要操作挂钩与挂孔相连才能进行床板的转移,同时采用传送带转移后还需人工操作分离床板进行彻底对位,使用不便,且现有技术在分离床板实现对位后需要操作四个插接组件进行分离床板的固定,操作较为麻烦,无法满足实际使用中的需求,所以市面上迫切需要能改进的技术,以解决上述问题。
发明内容
本发明的目的在于提供一种监护应急抢救无接触转移装置,通过电机的工作可使得移动盒向床板方向移动病使插块插接至盲槽中,再利用电机的工作使移动盒前移即可使床板一次性对位,且通过在插块插接至盲槽中的状态下,使梯形块脱离对凸形板的遮挡作用,在弹性件二的作用下使插条的上端插接至插槽中实现对床板的水平固定,解决了现有技术在使用时,需要操作挂钩与挂孔相连才能进行床板的转移,同时采用传送带转移后还需人工操作分离床板进行彻底对位,使用不便,且现有技术在分离床板实现对位后需要操作四个插接组件进行分离床板的固定,操作较为麻烦的问题。
为解决上述技术问题,本发明是通过以下技术方案实现的:
本发明为一种监护应急抢救无接触转移装置,包括U形板,U形板上壁的左右两侧均通过螺栓固定有矩形板,矩形板的上壁设置有床板,U形板的内部分别设置有转移组件和限位组件;其中,限位组件包括凸形板,凸形板上壁的左右两侧均固定有插条,插条所在位置处对应的矩形板上开设有穿槽,且插条的上端贯穿穿槽的内部,凸形板的下壁固定有弹性件二,上述设置,在插块插接至盲槽内部的状态下,通过使插条插接至穿槽的内部,使得利用插块和插条实现对床板的水平定位,操作更加简单;转移组件包括移动块,移动块的内部螺纹连接有螺杆,螺杆的前端固定有齿轮一,齿轮一的左方啮合连接有齿轮二,齿轮二的后方设置有电机,移动块的上方设置有回形盒,回形盒的内部设置有移动板,移动板右端的上方设置有移动盒,移动盒内部的后侧设置有推块,推块的上方设置有插块,通过电机工作带动齿轮二转动,带动齿轮一和螺杆转动,在移动块上凸杆和回形盒上凸台的配合作用下,使移动盒向床板移动直至插块插接至盲槽内,控制电机的工作即可使得床板移动至两个矩形板上实现一次性完成床板的对位,使用更加方便。
进一步地,凸形板下壁的左右两端均固定有导向杆,导向杆的外部设置有导向套,且导向杆与导向套间隙配合,导向套与U形板固定连接。
进一步地,U形板的后壁开设有操作槽,且凸形板的后端位于操作槽中,操作槽的左方对应的U形板上开设有矩形槽,矩形槽中插接有操作块,操作块的前端固定有梯形块,且梯形块上壁的长度小于梯形块下壁的长度。
进一步地,插条前壁的长度大于插条后壁的长度,U形板的左右两侧侧壁均通过螺栓固定有侧板,弹性件二的下端与U形板内侧的下壁抵接。
进一步地,螺杆通过轴承与U形板转动连接,电机的后壁固定有安装板,且安装板与U形板固定连接,移动板与回形盒间隙配合。
进一步地,回形盒下壁的左端固定有转动杆,且转动杆通过轴承与U形板转动连接,回形盒下壁的前后两侧均固定有凸台,移动块的上壁固定有凸杆,且凸杆位于两个凸台之间。
进一步地,移动板上壁的左右两端分别固定有凸起二和圆杆,回形盒的上壁开设有限位槽二,且凸起二位于限位槽二中,圆杆通过轴承与移动盒转动连接,移动盒与矩形板间隙配合。
进一步地,插块的左壁固定有凸起一,凸起一所在位置处对应的移动盒上开设有限位槽一,且凸起一位于限位槽一内,移动盒的内部开设有L形槽,且插块和推块均位于L形槽中,插块前端的水平面高于插块后端的水平面,推块前壁的长度大于推块后壁的长度。
进一步地,推块的前壁固定有连接杆,连接杆的前端固定有操作板,且操作板位于移动盒的外部,连接杆的外部套设有弹性件一,且弹性件一的两端分别与对应的推块和移动盒抵接。
进一步地,插块所在位置处对应床板的下壁开设有盲槽,且插块的上端位于盲槽的内部,盲槽的前方对应床板的下壁开设有导向槽,且导向槽与移动盒相适配,床板的后侧还开设有与插条相适配的插槽,移动盒所在位置处对应U形板的前壁开设有避空槽。
本发明具有以下有益效果:
1、本发明通过设置电机、齿轮一、齿轮二、螺杆、移动块、移动盒和插块,在电机的工作下,在齿轮一和齿轮二的配合作用下使得螺杆转动,带动移动块移动,在凸杆和凸台的作用下,使得移动板和回形盒转动,从而带动移动盒向床板移动,直至插块插接至盲槽中,此时使电机逆向转动可使得插块推动床板向两个矩形板上移动直至彻底对位,与现有技术相比,通过控制电机工作即可使床板测地对位,无需现有技术需要人工过多地操作,使用更加方便,解决了现有技术在使用时,需要操作挂钩与挂孔相连才能进行床板的转移,同时采用传送带转移后还需人工操作分离床板进行彻底对位,使用不便的问题。
2、本发明通过设置凸形板、插条和弹性件二,彻底对位后,插块位于盲槽内,使梯形块脱离对凸形板的压制,在弹性件二的作用下,使得凸形板上移,带动插条的上端插接至插槽中,即可实现对床板的水平固定,与现有技术相比,移动梯形块与凸形板处于非接触状态,即可使插条的上端插入插槽内,即可使得利用插条和插块对床板进行水平固定,使得对床板进行水平固定的操作更加简单,解决了现有技术在分离床板实现对位后需要操作四个插接组件进行分离床板的固定,操作较为麻烦的问题。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
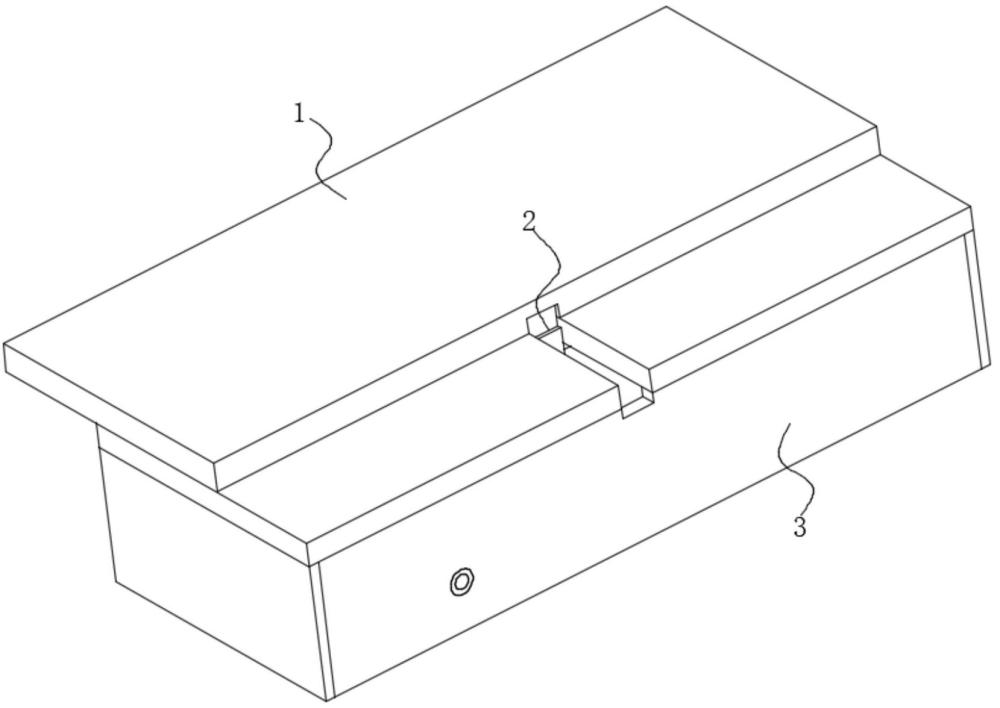
图1为一种监护应急抢救无接触转移装置的前视结构图;
图2为一种监护应急抢救无接触转移装置的后视结构图;
图3为限位组件与U形板的连接结构图;
图4为转移组件与U形板的连接结构图;
图5为转移组件的分解结构图;
图6为移动盒的竖直方向的剖视结构图;
图7为限位组件的分解结构图;
图8为矩形板与U形板的连接结构图;
图9为矩形板的结构图;
图10为床板的仰视结构图。
附图中,各标号所代表的部件列表如下:
1、床板;101、导向槽;102、盲槽;103、插槽;2、转移组件;201、移动盒;2011、限位槽一;2012、L形槽;202、插块;2021、凸起一;203、回形盒;2031、转动杆;2032、限位槽二;2033、凸台;204、移动板;2041、凸起二;2042、圆杆;205、齿轮一;206、齿轮二;207、电机;208、螺杆;209、移动块;2091、凸杆;210、推块;211、弹性件一;212、连接杆;213、操作板;3、U形板;301、矩形槽;302、操作槽;303、侧板;304、安装板;305、避空槽;306、矩形板;3061、穿槽;4、限位组件;401、导向套;402、梯形块;403、凸形板;4031、导向杆;404、插条;405、弹性件二;406、操作块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
请参阅图1至10所示,本发明为一种监护应急抢救无接触转移装置,包括U形板3,U形板3上壁的左右两侧均通过螺栓固定有矩形板306,为床板1提供放置平台,矩形板306的上壁设置有床板1,U形板3的内部分别设置有转移组件2和限位组件4;其中,限位组件4包括凸形板403,为插条404和导向杆4031提供固定平台,凸形板403上壁的左右两侧均固定有插条404,插条404所在位置处对应的矩形板306上开设有穿槽3061,且插条404的上端贯穿穿槽3061的内部,凸形板403的下壁固定有弹性件二405,弹性件二405的设置使得释放对凸形板403的压制力后,使得凸形板403向上移动,带动插条404自动插接至插槽103内,上述设置,在插块202插接至盲槽102内部的状态下,通过使插条404插接至穿槽3061的内部,使得利用插块202和插条404实现对床板1的水平定位,操作更加简单;转移组件2包括移动块209,移动块209的下壁与U形板3相接触,避免螺杆208转动时移动块209发生转动,移动块209的内部螺纹连接有螺杆208,螺杆208转动使得移动块209转动,螺杆208的前端固定有齿轮一205,齿轮一205的左方啮合连接有齿轮二206,齿轮二206的后方设置有电机207,电机207为现有技术,在此不对其型号作限定,当电机207工作时,齿轮二206和齿轮一205均处于转动状态,移动块209的上方设置有回形盒203,为移动板204提供安装平台,回形盒203的内部设置有移动板204,当回形盒203转动时,由于移动盒201仅可前后移动,使得移动板204在回形盒203外部的长度会对应发生变化,移动板204右端的上方设置有移动盒201,在两个矩形板306的作用下,移动盒201仅可前后移动,移动盒201内部的后侧设置有推块210,推块210向前移动时,插块202在重力作用下向下移动与插槽103脱离,推块210的上方设置有插块202,插块202的上端位于盲槽102内时,插块202向前移动即可带动床板1向前移动,通过电机207工作带动齿轮二206转动,带动齿轮一205和螺杆208转动,在移动块209上凸杆2091和回形盒203上凸台2033的配合作用下,使移动盒201向床板1移动直至插块202插接至盲槽102内,控制电机207的工作即可使得床板1移动至两个矩形板306上实现一次性完成床板1的对位,使用更加方便。
其中如图1、2、3、7、10所示,凸形板403下壁的左右两端均固定有导向杆4031,导向杆4031的外部设置有导向套401,且导向杆4031与导向套401间隙配合,导向套401与U形板3固定连接,上述设置,导向套401和导向杆4031的配合使得凸形板403垂直上下移动,便于插条404准确插入插槽103中。
U形板3的后壁开设有操作槽302,且凸形板403的后端位于操作槽302中,通过操作槽302为人们操作凸形板403向下移动提供操作空间,操作槽302的左方对应的U形板3上开设有矩形槽301,为操作块406的移动提供空间,矩形槽301中插接有操作块406,操作块406移动即可使得梯形块402移动,操作块406的前端固定有梯形块402,通过梯形块402移动至凸形板403的上方即可避免凸形板403在无人力作用下向上移动,且梯形块402上壁的长度小于梯形块402下壁的长度,使得梯形块402的左壁为斜坡状,无需手部操作凸形板403向下移动即可使梯形块402对凸形板403进行压制,此作为另一种对凸形块的操作方式。
插条404前壁的长度大于插条404后壁的长度,使得插条404的上壁为斜坡状,便于在梯形块402未对凸形板403压制时,无需首先操作凸形板403向下移动即可使床板1顺利向前移动,U形板3的左右两侧侧壁均通过螺栓固定有侧板303,弹性件二405的下端与U形板3内侧的下壁抵接。
其中如图1、2、4、5、6、8、10所示,螺杆208通过轴承与U形板3转动连接,使得螺杆208可在固定的位置转动,电机207的后壁固定有安装板304,且安装板304与U形板3固定连接,移动板204与回形盒203间隙配合。
回形盒203下壁的左端固定有转动杆2031,且转动杆2031通过轴承与U形板3转动连接,电机207工作时,回形盒203沿转动杆2031为轴心转动,回形盒203下壁的前后两侧均固定有凸台2033,移动块209的上壁固定有凸杆2091,且凸杆2091位于两个凸台2033之间,当凸杆2091移动时,在凸台2033的作用下使得回形盒203转动。
移动板204上壁的左右两端分别固定有凸起二2041和圆杆2042,回形盒203的上壁开设有限位槽二2032,且凸起二2041位于限位槽二2032中,圆杆2042通过轴承与移动盒201转动连接,移动盒201与矩形板306间隙配合,上述设置,凸起二2041和限位槽二2032的配合可避免移动板204与回形盒203脱离,而圆杆2042的设置,使得移动盒201沿圆杆2042转动。
插块202的左壁固定有凸起一2021,凸起一2021所在位置处对应的移动盒201上开设有限位槽一2011,且凸起一2021位于限位槽一2011内,凸起一2021和限位槽一2011的设置可避免插块202与移动盒201脱离,移动盒201的内部开设有L形槽2012,且插块202和推块210均位于L形槽2012中,插块202前端的水平面高于插块202后端的水平面,使得插块202的上壁为斜坡状,在床板1向前移动时无需先降下插块202,推块210前壁的长度大于推块210后壁的长度,使得推块210的后壁呈斜坡状态,当推块210向后移动时使得插块202向上移动。
推块210的前壁固定有连接杆212,连接杆212的前端固定有操作板213,且操作板213位于移动盒201的外部,连接杆212的外部套设有弹性件一211,且弹性件一211的两端分别与对应的推块210和移动盒201抵接,上述设置,当需要移除床板1时,控制插条404与插槽103脱离,再控制操作板213向前移动,带动连接杆212和推块210向前移动,插块202会进入移动盒201的内部,此时弹性件处于压缩状态,插块202失去对床板1的限位效果,即可移除床板1。
插块202所在位置处对应床板1的下壁开设有盲槽102,且插块202的上端位于盲槽102的内部,此状态下,插块202实现对床板1的限位效果,盲槽102的前方对应床板1的下壁开设有导向槽101,且导向槽101与移动盒201相适配,在移动盒201向后移动时,会穿过导向槽101,直至插块202插接至盲槽102中,床板1的后侧还开设有与插条404相适配的插槽103,当插条404的上端插接至插槽103内时,实现对床板1的限位,移动盒201所在位置处对应U形板3的前壁开设有避空槽305,当床板1彻底对位后,操作板213的下端位于避空槽305中。
本实施例的一个具体应用为:首先控制操作块406沿矩形槽301向右移动,带动凸形板403下降,使得插条404的上端的水平面低于矩形板306上壁的水平面,然后使床板1上的导向槽101位于移动盒201的正后方,此时使电机207工作带动齿轮二206转动,带动齿轮一205和螺杆208转动,从而使得移动块209和凸杆2091向后移动,在凸台2033的作用下,使得回形盒203的右端向后转动,此时移动板204向后转动的同时与回形盒203相对移动,最终带动移动盒201向后移动并穿过导向槽101,直至在弹性件的作用下带动推块210向后移动使插块202插接至盲槽102内,此时使电机207反向转动,即可使得插块202向前移动,从而带动床板1向前移动,直至床板1实现彻底对位,然后控制操作块406向左移动脱离对凸形板403的压制,在弹性件二405的作用下使得凸形板403带动插条404向上移动,使得插条404的上端位于插槽103内实现对床板1的水平方向进行限位。
以上仅为本发明的优选实施例,并不限制本发明,任何对前述各实施例所记载的技术方案进行修改,对其中部分技术特征进行等同替换,所作的任何修改、等同替换、改进,均属于在本发明的保护范围。