一种医疗器械智能清洗机
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及医疗器械的技术领域,尤其涉及一种医疗器械智能清洗机。
背景技术
医用手术剪刀在使用后,刀身及刀头部位将附着凝固血块和残留的人体组织组成的粘稠杂质,现有方式一般通过人工不断进行冲洗去除这一部分杂质,但由于有些杂质凝固程度较深,故需要进行长时间的冲洗,且非常容易残留小块的凝固杂质导致冲洗效果不佳,而若放在清洗箱中进行浸泡刷洗,被刷下的杂质将杂乱漂浮在清洗箱中,并附着在清洗箱内壁,造成难以对清洗箱进行清洗的问题的同时,将医用手术剪刀捞出的同时还会粘附一部分杂质,影响其清洗效果;
现有技术对医用手术剪刀进行清洗时,虽能将医用手术剪刀张开后针对转轴前侧的刀口进行清洗,但未对其转轴后侧的刀口进行清洗,且在将医用手术剪刀刀口张开后进行清洗时,靠近转轴的刀口部位极易卡入杂质,影响清洗效果的同时,还将会对医用手术剪刀刀口造成损坏。
发明内容
为了克服医用手术剪刀进行清洗时,未能对刷下的杂质及时进行收集,从而对清洗箱及医用手术剪刀造成二次污染,清洗效果不佳,且未对医用手术剪刀刀口进行完整清洗的缺点,本发明提供一种医疗器械智能清洗机。
本发明的技术实施方案为:一种医疗器械智能清洗机,包括有清洗台、第一清洗箱、第二清洗箱和分隔板;清洗台上设置有第一清洗箱和第二清洗箱,且第一清洗箱和第二清洗箱均设计有进液口和排液口;第二清洗箱内固接有分隔板;还包括有微型水泵、吸附筒、过滤网、第四弹簧、橡胶球、夹持系统、预清洗系统和深度清洗系统;清洗台和第一清洗箱共同连接有夹持系统;清洗台和第一清洗箱共同连接有预清洗系统;预清洗系统连接有多个微型水泵;预清洗系统连接有多个用于吸附絮状杂质的吸附筒;每个吸附筒开口处均固接有一个过滤网;每个吸附筒内均通过一个第四弹簧固接有一个橡胶球;清洗台和第二清洗箱共同连接有深度清洗系统。
更为优选的是,夹持系统包括有第一推杆、第一电机、第一导轨、第一移动块、第一夹持杆、第二导轨、第二移动块、第二推杆、第一弹簧、第二夹持杆、第二弹簧和第一连接杆;清洗台上安装有第一推杆;第一推杆伸缩部安装有第一电机;第一电机输出轴固接有第一导轨;第一导轨滑动连接有多个第一移动块;所有第一移动块均固接有一个第一夹持杆;第一清洗箱安装有多个第二导轨;所有第二导轨均分别滑动连接有多个第二移动块;位于左方的第二移动块均安装有一个第二推杆;所有第二推杆均滑动连接有一个第二夹持杆,且各第二夹持杆与第二推杆之间固接有第一弹簧;所有第二夹持杆均滑动连接有一个第一连接杆,且各第一连接杆与第二夹持杆之间固接有第二弹簧;所有第一连接杆右侧均与一个第二移动块固接。
更为优选的是,第一夹持杆和第二夹持杆上均设计有限位环。
更为优选的是,预清洗系统包括有预清洗组件和包裹组件;清洗台和第一清洗箱共同连接有预清洗组件;预清洗组件连接有包裹组件;预清洗组件包括有第三推杆、第三弹簧、中空刷板、第一锲型块、第二锲型块、第一条形喷嘴和第二条形喷嘴;清洗台安装有两个第三推杆,且两个第三推杆伸缩部分别与第一清洗箱底部滑动连接;两个第三推杆伸缩部各连接有一个中空刷板;所有中空刷板内均设计有一个腔体,且各中空刷板均与多个微型水泵连通;每个中空刷板均与多个吸附筒连通;每个中空刷板和对应的第三推杆伸缩部之间均固接有两个第三弹簧;所有中空刷板均固接有两个第一锲型块;第一清洗箱底部固接有四个第二锲型块;第一清洗箱内安装有两个第一条形喷嘴;第一清洗箱内安装有两个第二条形喷嘴,且两个第二条形喷嘴位于两个第一条形喷嘴下方。
更为优选的是,包裹组件包括有第一连接块、第二电机、连接轴、第二连接杆、第一刷毛和限位球;两个中空刷板上表面和下表面均分别固接有若干第一连接块;所有位于同一水平面上的一个第一连接块内均安装有第二电机;所有位于同一水平面上的第一连接块均共同转动连接有一个连接轴,且四个连接轴分别与一个第二电机输出轴固接;四个连接轴上分别固接有若干第二连接杆;每个第二连接杆上均固接有若干的第一刷毛;每个第二连接杆均固接有一个限位球。
更为优选的是,第一刷毛沿第二连接杆方向倾斜朝内设计。
更为优选的是,深度清洗系统包括有振动刷洗组件和转动刷洗组件;第二清洗箱连接有振动刷洗组件和转动刷洗组件,且转动刷洗组件位于振动刷洗组件下方;振动刷洗组件包括有第二连接块、安装格板和振动刷板;第二清洗箱内壁固接有两个第二连接块;两个第二连接块共同固接有安装格板;安装格板每个格板间均各自安装有若干振动刷板,振动刷板内置有电动振动器。
更为优选的是,振动刷洗组件还包括有高压喷头;安装格板每个格板间均各自安装有两个高压喷头。
更为优选的是,转动刷洗组件包括有第三电机、第一安装筒、第二安装筒、导向管、第四推杆、第三连接杆和第二刷毛;第二清洗箱外壁安装有两个第三电机;两个第三电机输出轴各固接有一个第一安装筒,且两个第一安装筒另一端均与第二清洗箱转动连接;两个第一安装筒内各固接有一个第二安装筒;两个第二安装筒外环面沿轴向方向均环形阵列设置有若干个导向管;两个第二安装筒上的导向管倾斜方向相反,且前方的所有导向管均与前方的第一安装筒固接,后方的所有导向管均与后方的第一安装筒固接;两个第一安装筒一端各安装有一个第四推杆;两个第四推杆伸缩部各固接有一个第三连接杆;两个第三连接杆上各固接有若干个与导向管对应的第二刷毛,每个第二刷毛各穿过一个导向管,并且所有第二刷毛均伸出第一安装筒外。
更为优选的是,深度清洗系统还包括有底部隔板组件;底部隔板组件由第一V型板、第二V型板、条形喷头、第五推杆、连接板、第四连接杆、第三V型板、柔性防水布和泄水阀组成;第二清洗箱底部固接有两个第一V型板和两个第二V型板,且两个第一V型板和两个第二V型板均未与分隔板接触,两个第一V型板固定在第二清洗箱左右两侧,两个第二V型板固定在两个第一V型板之间;第二清洗箱底部前后两侧各安装有一个条形喷头;清洗台安装有第五推杆;第五推杆伸缩部固接有连接板;连接板固接有若干个第四连接杆,且所有第四连接杆均与分隔板滑动连接;左方的三个第四连接杆、中间的三个第四连接杆和右方的三个第四连接杆分别共同固接有一个第三V型板,且所有第三V型板均与分隔板接触;所有第三V型板的V型槽前侧和V型槽后侧均包裹有柔性防水布;分隔板上安装有若干个呈矩形分布的泄水阀,且所有泄水阀均匀分布于两个第一V型板和两个第二V型板下方。
与现有技术相比,本发明具有如下优点:本发明通过设置吸附筒和包裹组件配合,对预清洗组件刷下的杂质进行了有效收集,防止了从医用手术剪刀刷下的杂质漂进清洗液中,对清洗液造成污染,进而避免了杂质重新附着在第一清洗箱和医用手术剪刀上造成二次污染的情况发生,且通过在第一清洗箱底部设置第二锲型块,使中空刷板位于底部时相互靠近,从而进行自清洗,将收集的杂质释放出来,便于将杂质冲出第一清洗箱,本发明还通过两个第二夹持杆夹持医用手术剪刀,并通过相向移动,搓动医用手术剪刀,使第二夹持杆不断轻微翻转,从而配合中空刷板进行刷洗工作,提高了对医用手术剪刀的清洗效果。
本发明通过设置第二刷毛对医用手术剪刀转轴后侧的刀口进行了清洗,并在医用手术剪刀转动时将第二刷毛缩回,从而防止了医用手术剪刀将第二刷毛卡住,并配合振动刷板,对医用手术剪刀刀口进行了全方位的清洗。
本发明通过设置第二V型板和第三V型板,防止了沉底的杂质颗粒被振动刷板扬起,并在第二清洗箱排水时,通过降下第二V型板,使第二V型板和第二清洗箱连通处的开口缩小并形成负压,将粘附的杂质颗粒吸入第一V型板和第二V型板下方,并最终通过泄水阀排出,进而防止了杂质颗粒的残留。
附图说明
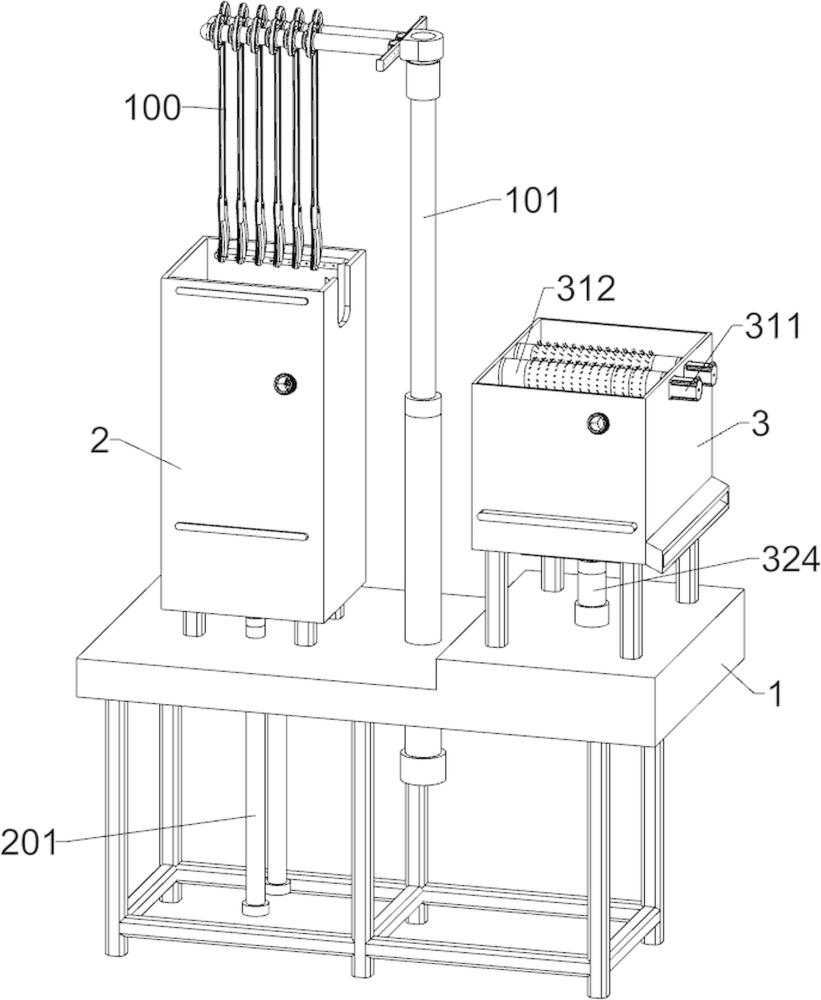
图1为本发明医疗器械智能清洗机公开的结构示意图;
图2为本发明医疗器械智能清洗机公开的部分结构示意图;
图3为本发明医疗器械智能清洗机公开的夹持系统的第一种部分结构示意图;
图4为本发明医疗器械智能清洗机公开的夹持系统的第二种部分结构示意图;
图5为本发明医疗器械智能清洗机公开的预清洗系统的第一种部分结构示意图;
图6为本发明医疗器械智能清洗机公开的预清洗系统中预清洗组件的部分结构示意图;
图7为本发明医疗器械智能清洗机公开的预清洗系统的第二种部分结构示意图;
图8为本发明医疗器械智能清洗机公开的预清洗系统的第三种部分结构示意图;
图9为本发明医疗器械智能清洗机公开的预清洗系统中包裹组件的部分结构示意图;
图10为本发明医疗器械智能清洗机公开的深度清洗系统的结构示意图;
图11为本发明医疗器械智能清洗机公开的深度清洗系统中振动刷洗组件的部分结构示意图;
图12为本发明医疗器械智能清洗机公开的深度清洗系统中转动刷洗组件的部分结构示意图;
图13为本发明医疗器械智能清洗机公开的深度清洗系统中底部隔板组件的结构示意图;
图14为本发明医疗器械智能清洗机公开的深度清洗系统中底部隔板组件的部分结构示意图。
附图中各零部件的标记如下:1-清洗台,2-第一清洗箱,3-第二清洗箱,4-分隔板,101-第一推杆,102-第一电机,103-第一导轨,104-第一移动块,105-第一夹持杆,106-第二导轨,107-第二移动块,108-第二推杆,109-第一弹簧,1010-第二夹持杆,1011-第二弹簧,1012-第一连接杆,201-第三推杆,202-第三弹簧,203-中空刷板,204-第一锲型块,205-第二锲型块,206-第一条形喷嘴,207-第二条形喷嘴,211-微型水泵,212-吸附筒,213-过滤网,214-第四弹簧,215-橡胶球,221-第一连接块,222-第二电机,223-连接轴,224-第二连接杆,225-第一刷毛,226-限位球,301-第二连接块,302-安装格板,303-振动刷板,304-高压喷头,311-第三电机,312-第一安装筒,313-第二安装筒,314-导向管,315-第四推杆,316-第三连接杆,317-第二刷毛,321-第一V型板,322-第二V型板,323-条形喷头,324-第五推杆,325-连接板,326-第四连接杆,327-第三V型板,328-柔性防水布,329-泄水阀,100-医用手术剪刀。
具体实施方式
下面结合附图和实施例对本发明作进一步的说明。
实施例1
一种医疗器械智能清洗机,如图1-9所示,包括有清洗台1、第一清洗箱2、第二清洗箱3和分隔板4;
清洗台1上设置有第一清洗箱2和第二清洗箱3,且第一清洗箱2和第二清洗箱3均设计有进液口和排液口;第二清洗箱3的底部固接有分隔板4;
还包括有微型水泵211、吸附筒212、过滤网213、第四弹簧214、橡胶球215、夹持系统、预清洗系统和深度清洗系统;清洗台1和第一清洗箱2共同连接有夹持系统;夹持系统用于夹持并运送医用手术剪刀100,并将医用手术剪刀100运送到第一清洗箱2内;清洗台1和第一清洗箱2共同连接有预清洗系统;通过预清洗系统对医用手术剪刀100进行整体清洗,除去凝结血块和人体组件等絮状杂质;预清洗系统连接有多个微型水泵211;预清洗系统连接有多个吸附筒212;每个吸附筒212开口处均固接有一个过滤网213;每个吸附筒212内均通过一个第四弹簧214固接有一个橡胶球215;清洗台1和第二清洗箱3共同连接有深度清洗系统,通过深度清洗系统针对医用手术剪刀100刀口部位进行针对性清洗,达到更好的清洗效果。
微型水泵211进出水口均设计有滤网,用于防止微型水泵211内吸入杂质发生故障。
如图2-4所示,夹持系统包括有第一推杆101、第一电机102、第一导轨103、第一移动块104、第一夹持杆105、第二导轨106、第二移动块107、第二推杆108、第一弹簧109、第二夹持杆1010、第二弹簧1011和第一连接杆1012;清洗台1上安装有第一推杆101;第一推杆101伸缩部螺栓连接有第一电机102;第一电机102输出轴固接有第一导轨103;第一导轨103滑动连接有两个第一移动块104;两个第一移动块104各固接有一个第一夹持杆105;第一清洗箱2左侧和右侧分别安装有一个第二导轨106;左侧的第二导轨106滑动连接有两个第二移动块107,右侧的第二导轨106滑动连接有另外两个第二移动块107;位于左方的第二移动块107均安装有一个第二推杆108;第二导轨106、第二移动块107和第二推杆108均做有防水设计;两个第二推杆108均分别滑动连接有一个第二夹持杆1010,且各第二夹持杆1010与第二推杆108之间固接有第一弹簧109;两个第二夹持杆1010均分别滑动连接有一个第一连接杆1012,且各第一连接杆1012与第二夹持杆1010之间固接有第二弹簧1011;两个第一连接杆1012右侧均分别与一个第二移动块107固接;通过第二夹持杆1010夹持医用手术剪刀100刀身进行再次固定,并通过两个第二夹持杆1010的相向移动搓动医用手术剪刀100刀身,使医用手术剪刀100轻微转动。
第一夹持杆105和第二夹持杆1010上均设计有限位环,用于分隔医用手术剪刀100,便于对医用手术剪刀100进行清洗的同时,防止医用手术剪刀100间产生磕碰。
如图5-9所示,预清洗系统包括有预清洗组件和包裹组件;清洗台1和第一清洗箱2共同连接有预清洗组件;预清洗组件连接有包裹组件;通过包裹组件将医用手术剪刀100的刷洗部位进行包裹,防止凝结血块和残留组织等杂质漂入清洗液中;预清洗组件包括有第三推杆201、第三弹簧202、中空刷板203、第一锲型块204、第二锲型块205、第一条形喷嘴206和第二条形喷嘴207;清洗台1安装有两个第三推杆201,且两个第三推杆201伸缩部分别与第一清洗箱2底部滑动连接;两个第三推杆201伸缩部各连接有一个中空刷板203;所有中空刷板203内均设计有一个腔体,且两个中空刷板203相背侧均与多个微型水泵211连通;每个中空刷板203刷毛侧均与多个吸附筒212连通;每个中空刷板203和对应第三推杆201伸缩部之间均固接有两个第三弹簧202;所有中空刷板203相背侧的左部和右部均分别固接有一个第一锲型块204;第一清洗箱2底部固接有四个第二锲型块205;第一清洗箱2前后两侧的内壁上各倾斜向下安装有一个第一条形喷嘴206;第一清洗箱2前后两侧的内壁上各倾斜向下安装有一个第二条形喷嘴207,且两个第二条形喷嘴207位于两个第一条形喷嘴206下方;通过第一夹持杆105将医用手术剪刀100送入第一清洗箱2内后,再通过两个中空刷板203配合沿医用手术剪刀100上下移动对其进行刷洗。
如图9所示,包裹组件包括有第一连接块221、第二电机222、连接轴223、第二连接杆224、第一刷毛225和限位球226;两个中空刷板203上表面和下表面均分别固接有若干第一连接块221;所有位于同一水平面上的最右侧的第一连接块221内均安装有第二电机222;所有位于同一水平面上的第一连接块221均共同转动连接有一个连接轴223,且四个连接轴223分别与一个第二电机222输出轴固接;四个连接轴223上分别固接有若干第二连接杆224;每个第二连接杆224上均固接有若干的第一刷毛225;每个第二连接杆224均固接有一个限位球226;通过将限位球226插入相邻的医用手术剪刀100之间,对医用手术剪刀100进行分隔,从而防止医用手术剪刀100之间产生磕碰。
第一刷毛225沿第二连接杆224方向倾斜朝内设计,使第一刷毛225均朝向中空刷板203,便于对中空刷板203刷下的杂质进行拦截收集。
上述实施例1的工作原理是:本发明具体工作时,先向第一清洗箱2和第二清洗箱3内灌入清洗液后,再由人工将医用手术剪刀100的指圈挂在第一夹持杆105上,并通过第一夹持杆105上的限位环进行分隔,状态如图1所示,之后再通过控制第一推杆101带动医用手术剪刀100下降插入到第一清洗箱2内,且在医用手术剪刀100穿过第二夹持杆1010后,通过控制第二移动块107带动两个第二夹持杆1010相互靠近夹持医用手术剪刀100刀身,进一步避免医用手术剪刀100下降时产生晃动造成磕碰,当第二夹持杆1010将通过指圈将医用手术剪刀100卡住后,控制第一推杆101带动医用手术剪刀100停止下降,准备进行预清洗工作。
需要注意的是,在医用手术剪刀100插入第一清洗箱2前,预清洗系统位于第一清洗箱2底部,并位于第二锲型块205上方,此时通过控制位于中空刷板203上方的第二电机222带动连接轴223转动,进而带动第二连接杆224转动,使第二连接杆224带动限位球226向两侧张开,从而便于医用手术剪刀100插入中空刷板203之间,并防止第一刷毛225在刷洗前将医用手术剪刀100表面的杂质刮下。
之后,通过控制第三推杆201带动中空刷板203向上移动,待中空刷板203与医用手术剪刀100刀口正对后,通过控制第二电机222带动第二连接杆224复位,从而将医用手术剪刀100与中空刷板203接触部位从上下进行包裹后,通过第二连接杆224及第一刷毛225拦截中空刷板203刷下的杂质并进行收集,防止杂质漂浮于清洗液中,从而方便了对第一清洗箱2的清洗工作。需要注意的是,在刷洗过程中,控制微型水泵211不断通过与其连通的中空刷板203空腔和吸附筒212抽出两个的中空刷板203间的清洗液,进而将中空刷板203刷下的杂质吸附在过滤网213上。随后,通过控制第三推杆201带动中空刷板203继续向上移动,对医用手术剪刀100进行刷洗。
需要注意的是,在刷洗过程中,通过控制第二推杆108反复推动第一弹簧109和第二夹持杆1010,并使第二夹持杆1010在第一弹簧109和第二弹簧1011作用下往复振动,且两个第二夹持杆1010同一时刻相对运动方向相反,从而搓动医用手术剪刀100,使第二夹持杆1010不断轻微翻转,从而配合中空刷板203进行刷洗工作,提高了对医用手术剪刀100的清洗效果。
之后,通过控制第三推杆201带动中空刷板203向下移动,再对医用手术剪刀100进行一次刷洗,并在脱离医用手术剪刀100后继续向下移动,使第一锲型块204与第二锲型块205接触后,挤压中空刷板203,使两块中空刷板203相互靠近的同时,拉伸第三弹簧202,并带动第一刷毛225和限位球226收拢,进一步防止杂质飘出。
之后,通过控制第一推杆101带动第一夹持杆105上升,进而带动医用手术剪刀100上升离开第一清洗箱2,且在此过程中,通过控制第一条形喷嘴206对医用手术剪刀100从指圈部位进行冲洗,防止杂质残留在医用手术剪刀100上。
之后,待医用手术剪刀100完全退出第一清洗箱2后,控制关闭第一条形喷嘴206,再开启第一清洗箱2出液口排出清洗液,并使清洗液保持在没过限位球226顶部后,控制第一清洗箱2停止排液,再通过控制第三推杆201带动中空刷板203向上下移动,使两个中空刷板203交错上下移动,从使两个中空刷板203间相互刷洗进行自清洗工作,同时通过中空刷板203对第二连接杆224、第一刷毛225和限位球226进行刷洗,将其上的杂质刷下并混入剩余清洗液中。
与此同时,通过控制微型水泵211将清洗液泵入中空刷板203中的空腔内,进而使空腔中的清洗液通过吸附筒212喷出,从而将过滤网213上附着的杂质冲出,进一步的,在清洗液喷出过程中,将挤压橡胶球215,使橡胶球215拉伸第四弹簧214的同时将过滤网213向外侧撑开,从而便于另一个中空刷板203对过滤网213进刷洗,进而提高对过滤网213的清洗效果。
之后,通过控制第一清洗箱2继续排出剩余清洗液,并通过控制微型水泵211停止工作,从而使第四弹簧214带动橡胶球215复位,从而使过滤网213复位,此时控制两个中空刷板203继续进行刷洗动作,再通过控制第二条形喷嘴207喷出清洗液,对中空刷板203和第二连接杆224、第一刷毛225和限位球226进行冲洗,待完成自清洗工作后,控制预清洗系统复位,并通过进液口向第一清洗箱2内通入清洗液,进行清洗液更换工作,等待对下一组医用手术剪刀100进行预清洗工作。
实施例2
在实施例1的基础上,如图10-12所示,深度清洗系统包括有振动刷洗组件和转动刷洗组件;第二清洗箱3连接有振动刷洗组件和转动刷洗组件,且转动刷洗组件位于振动刷洗组件下方;振动刷洗组件包括有第二连接块301、安装格板302和振动刷板303;第二清洗箱3内壁左侧和右侧分别固接有一个第二连接块301;两个第二连接块301共同固接有安装格板302;安装格板302每个格板间均各自安装有若干振动刷板303,振动刷板303内置有电动振动器;通过振动刷板303针对医用手术剪刀100刀口部位进行振动刷洗,并通过安装格板302将医用手术剪刀100分隔开,避免医用手术剪刀100间产生磕碰。
振动刷洗组件还包括有高压喷头304;安装格板302每个格板间均各自安装有两个高压喷头304,用于冲洗振动刷板303,避免杂质颗粒残留在振动刷板303影响下一组医用手术剪刀100的清洗工作。
转动刷洗组件包括有第三电机311、第一安装筒312、第二安装筒313、导向管314、第四推杆315、第三连接杆316和第二刷毛317;第二清洗箱3右侧上部安装有两个第三电机311;两个第三电机311输出轴各固接有一个第一安装筒312,且两个第一安装筒312另一端均与第二清洗箱3转动连接;第一安装筒312为铝合金材质;两个第一安装筒312内各固接有一个第二安装筒313;两个第二安装筒313外环面沿轴向方向均环形阵列设置有若干个导向管314;两个第二安装筒313上的导向管314倾斜方向相反,且前方的所有导向管314均与前方的第一安装筒312固接,后方的所有导向管314均与后方的第一安装筒312固接;两个第一安装筒312一端各安装有一个第四推杆315;两个第四推杆315伸缩部各固接有一个第三连接杆316;两个第三连接杆316上各固接有若干个与导向管314对应的第二刷毛317,每个第二刷毛317各穿过一个导向管314,并且所有第二刷毛317均伸出第一安装筒312外;通过第二刷毛317转动刷洗医用手术剪刀100转轴后侧刀口部位,防止刀口卡入杂质颗粒。
上述实施例2的工作原理是:在完成对医用手术剪刀100的预清洗工作后,控制第一电机102带动第一夹持杆105和医用手术剪刀100转动至第二清洗箱3上方,再通过控制第三推杆201带动医用手术剪刀100降下,使医用手术剪刀100刀口部位穿过第一安装筒312插入安装格板302内,使相邻医用手术剪刀100被安装格板302分隔,并通过控制振动刷板303对医用手术剪刀100刀口部位进行针对性清洗,且此时医用手术剪刀100转轴后侧的刃口刚好被夹持在两个第一安装筒312之间,此时通过控制两个第三电机311分别带动一个第一安装筒312转动,进而通过第四推杆315和第三连接杆316带动第二刷毛317转动,对医用手术剪刀100转轴后侧的刃口部位进行刷洗,需要注意的是,两个第三电机311转动方向相反,且转动三圈后同时调转转动方向,使得第二刷毛317多次调转转动方向对医用手术剪刀100刀口部位进行刷洗,以提高刷洗效果。
需要注意的是,在振动刷板303刷洗过程中,被刷下的杂质颗粒将被第一V型板321、第二V型板322和第三V型板327导向后被分隔板4承接。
需要注意的是,在振动刷板303刷洗过程中,将通过控制第一移动块104沿第一导轨103方向移动,从而带动第一夹持杆105沿第一导轨103方向移动,进而将医用手术剪刀100指圈部位撑开,进而使医用手术剪刀100刀刃张开,并通过控制第一移动块104和第一导轨103配合带动第一夹持杆105复位,使医用手术剪刀100刀刃重新合上,使医用手术剪刀100重复张开合上过程,便于振动刷板303进行振动刷洗,且当医用手术剪刀100刀刃张合过程中,通过控制第四推杆315缩回,从而通过第三连接杆316带动第二刷毛317向左移动,将第二刷毛317拉入导向管314中进行收纳,从而防止医用手术剪刀100转轴位置的刀刃将第二刷毛317夹住。
之后,通过控制第一推杆101带动医用手术剪刀100退出第二清洗箱3,完成深度清洗工作,并由人工取下清洗完成的医用手术剪刀100,并更换下一组医用手术剪刀100重复清洗工作。
实施例3
在实施例2的基础上,如图13-14所示,深度清洗系统还包括有底部隔板组件;底部隔板组件由第一V型板321、第二V型板322、条形喷头323、第五推杆324、连接板325、第四连接杆326、第三V型板327、柔性防水布328和泄水阀329组成;第二清洗箱3底部固接有两个第一V型板321和两个第二V型板322,且两个第一V型板321和两个第二V型板322均未与分隔板4接触,两个第一V型板321固定在第二清洗箱3左右两侧,两个第二V型板322固定在两个第一V型板321之间;第二清洗箱3底部前后两侧各安装有一个条形喷头323;清洗台1安装有第五推杆324;第五推杆324伸缩部固接有连接板325;连接板325固接有九个第四连接杆326,且所有第四连接杆326均与分隔板4滑动连接;左方的三个第四连接杆326、中间的三个第四连接杆326和右方的三个第四连接杆326分别共同固接有一个第三V型板327,且所有第三V型板327均与分隔板4接触,并分布于两个第一V型板321和两个第二V型板322之间;且第三V型板327均为橡胶材质;三个第三V型板327的V型槽前侧和V型槽后侧均包裹有柔性防水布328;柔性防水布328布料为防水尼龙布;分隔板4上安装有若干个呈矩形分布的泄水阀329,且所有泄水阀329均匀分布于两个第一V型板321和两个第二V型板322下方。
上述实施例3的工作原理是:需要注意的是,在取出医用手术剪刀100后,通过控制第五推杆324带动三个第三V型板327向下移动,并使第三V型板327与分隔板4接触并受到挤压,使第三V型板327开口变大的同时,将V形部插入第一V型板321和第二V型板322下方,从而使第一V型板321和第二V型板322与第二清洗箱3连通处的开口缩小,并将分隔板4上的杂质颗粒推入第一V型板321和第二V型板322下方,随后控制泄水阀329开启进行排液,使第一V型板321和第二V型板322与第二清洗箱3连通处的开口处形成较大的负压,从而将粘附在第一V型板321、第二V型板322和第三V型板327上侧的杂质颗粒吸入第一V型板321和第二V型板322下方,并最终通过泄水阀329排出,并在清洗液排尽后,再通过控制条形喷头323再次对第一V型板321、第二V型板322和第三V型板327进行冲刷,进一步冲去残留的杂质颗粒,随后,再通过进液口向第二清洗箱3通入清洗液,进行清洗液更换工作。
以上所述仅为本发明的实施例子而已,并不用于限制本发明。凡在本发明的原则之内,所作的等同替换,均应包含在本发明的保护范围之内。本发明未作详细阐述的内容属于本专业领域技术人员公知的已有技术。