一种二极电磁铁磁场参数计算值的检验装置及方法
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及一种二极电磁铁磁场参数计算值的检验装置及方法。
背景技术
在对粒子加速器的设计运行中,约束粒子传输路径主要是通过设计二极电磁铁的磁场来实现,粒子加速器内二极电磁铁的磁场设计所选择的偏转的磁场参数全部都是理想状态的计算值。然而,在二极电磁铁的实际加工制造中难免会存在系统误差,如铁芯的加工误差、线圈的绕制误差或组合磁铁的装配误差等,而这些误差则会引起二极电磁铁实际的磁场参数和几何特性等与设计值不同。
在二极电磁铁的磁场参数设计过程中,一般将装有用于测量磁场的霍尔传感器的探测器称为霍尔测头,现有的霍尔测头在磁铁气隙中的运动轨迹也是通过二极电磁铁的设计参数计算得到的,鲜有测量霍尔测头实际的运动轨迹的报道,因而无法判断二极电磁铁的设计参数与真实的磁场参数的差异。然而,在外部因素的影响下,根据理论计算设计的霍尔测头运动轨迹和霍尔测头的实际运动轨迹不相符的情况时常发生。二极电磁铁的磁场真实参数与计算参数的差异,将会直接影响霍尔测头在磁铁气隙中的运动轨迹的精准度,也会引起磁场中心的偏移或者粒子的偏转角度的变化,引起粒子束流中心轨道的偏移或者发射角度的增大,进而将会直接降低了粒子在粒子加速器内运行轨迹的精准性。因此,有必要通过霍尔测头在磁铁气隙中的运动轨迹的实测值对二极电磁铁的磁场参数计算值进行校正。
发明内容
本发明的目的在于提供一种二极电磁铁磁场参数计算值的检验装置及方法,通过对现有的霍尔测头在磁铁气隙中的运动轨迹的测量,用以解决二极电磁铁的磁场参数的理论设计值与真实值之间存在的误差来进行校正的问题。
本发明提供一种二极电磁铁磁场参数计算值的检验装置,包括:霍尔测头,内置有霍尔传感器;霍尔测头运动系统,包括三维直角坐标机构、驱动机构和运动控制器,所述三维直角坐标机构构成了由X轴、Y轴和Z轴组成的理论坐标系Frame1,所述三维直角坐标机构与所述霍尔测头对接;所述驱动机构通过控制所述三维直角坐标机构实现所述霍尔测头三维空间的运动;所述运动控制器与所述驱动机构通过信号线相连接;所述运动控制器与所述霍尔传感器通过信号线连接;霍尔测头跟踪系统,包括空间分析器、激光跟踪仪和反射靶球,所述反射靶球设置于所述霍尔测头内,且所述霍尔传感器的几何中心与所述反射靶球的球心位于同一铅垂线上;所述激光跟踪仪与所述反射靶球处于能实时跟踪的范围内;所述空间分析器与所述激光跟踪仪电连接;其中,所述霍尔测头设置于待测二极电磁铁的气隙内;所述运动控制器为所述霍尔传感器提供电流信号,且所述运动控制器通过所述驱动机构为所述霍尔传感器速度以及控制所述霍尔传感器在待测二极电磁铁的气隙中的位置;所述霍尔测头跟踪系统通过跟踪所述反射靶球建立能标记所述霍尔测头的实际坐标系Frame2。
优选地,还包括用户计算机,所述运动控制器与所述空间分析器均与用户计算机相连接。
优选地,所述霍尔测头运动系统还包括基座,所述三维直角坐标机构包括横坐标杆、纵坐标杆和探杆,所述横坐标杆水平设置于基座上,且所述横坐标杆可在基座上沿着直线左右滑动;所述纵坐标杆垂直设置于所述横坐标杆上,且所述纵坐标杆能在所述横坐标杆上沿着直线前后滑动;所述探杆水平设置于所述纵坐标杆上,且所述探杆能在所述纵坐标杆上沿着直线上下滑动;所述横坐标杆、所述纵坐标杆和所述探杆之间相互垂直,共同构成了由X轴、Y轴和Z轴组成的理论坐标系Frame1。
优选地,所述驱动机构包括X轴电机、Y轴电机和Z轴电机,X轴电机的输出轴与横坐标杆传动连接,用于控制横坐标杆在基座上沿着直线左右滑动;Y轴电机输出轴与纵坐标杆传动连接,用于纵坐标杆在横坐标杆上沿着直线前后滑动;Z轴电机输出轴与探杆传动连接,用于探杆在纵坐标杆上沿着直线上下滑动;X轴电机、Y轴电机和Z轴电机分别通过信号线与所述运动控制器相连接,当运动控制器分别控制X轴电机、Y轴电机和Z轴电机启动时,横坐标杆、纵坐标杆和探杆在各自电机的输出轴上运动,从而实现所述霍尔测头在三维空间的运动。
优选地,所述霍尔测头包括测头基体,所述测头基体包括套筒部和靶球杆部,所述套筒部和所述靶球杆部的端部对接一体成型,所述探杆与所述测头基体的套筒部对接;所述靶球杆部的外端端部设有霍尔传感器槽,所述霍尔传感器设置于所述霍尔传感器槽内,所述运动控制器与所述霍尔传感器通过信号线相连接。
优选地,所述霍尔测头跟踪系统还包括反射靶球固定装置,所述反射靶球固定装置包括靶球固定带和水平压板,所述水平压板水平设置于所述靶球杆部的上表面且与所述霍尔传感器相接触,所述反射靶球设置于所述水平压板的外端,所述反射靶球位于所述霍尔传感器的正上方且所述霍尔传感器的几何中心与所述反射靶球的球心位于同一铅垂线上。
优选地,所述水平压板水平设置于所述靶球杆部的上表面上,所述水平压板的外端下表面与所述霍尔传感器相接触;所述水平压板的外端的上表面向上凸起形成凸起部,所述凸起部的上表面设置为下凹弧面,所述凸起部位于所述霍尔传感器的正上方;所述反射靶球设置于所述水平压板的凸起部的下凹弧面内。
优选地,所述霍尔测头跟踪系统还包括靶球固定带,所述靶球固定带绑在所述反射靶球上且所述靶球固定带的两端固定于所述水平压板或所述靶球杆部上。
本发明还公开了一种二极电磁铁磁场参数计算值的检验方法,采用上述的二极电磁铁磁场参数计算值的检验装置,在该方法实施前,需要标定出反射靶球的球心和霍尔传感器的几何中心之间的高度差值H,该方法包括以下步骤:
步骤S1:根据待测二极电磁铁及其与霍尔传感器的相对位置关系计算出的霍尔传感器在待测二极电磁铁的气隙内的理论轨迹;
步骤S2:根据计算出的霍尔测头在待测二极电磁铁的气隙内的理论轨迹设计霍尔测头的轨迹点A1、A2,…,An及相应规定点的电流值;
步骤S3:启动霍尔测头运动系统,使霍尔测头达到轨迹点A1,并通过运动控制器向霍尔传感器输送电流值;
步骤S4:启动霍尔测头跟踪系统,由激光跟踪仪记录反射靶球的坐标F(x',y',z'),根据反射靶球与霍尔传感器的空间关系,由空间分析器换算出霍尔传感器在轨迹点A1中的实际坐标E(x',y',z'+H);
步骤S5:重复步骤S3至步骤S4,直至采集完霍尔传感器在轨迹点A2,…,An的所有的实际坐标;
步骤S6:将霍尔传感器在待测二极电磁铁的气隙内的理论轨迹设计霍尔测头的轨迹点A1、A2,…,An的理论坐标连成理论轨迹线,将霍尔传感器在轨迹点A1,A2,…,An中的实际坐标连成实际轨迹线,将理论轨迹线和实际轨迹线的数据和图形进行分析比较,由此判断霍尔传感器的理论轨迹与实测轨迹之间的误差,并根据误差允许范围对二极电磁铁磁场参数计算值进行校对。
与现有技术相比,本发明的有益效果是:
本发明公开了一种二极电磁铁磁场参数计算值的检验装置及方法,其中,霍尔测头运动系统用于建立理论坐标系,霍尔测头跟踪系统用于建立实际坐标系,由于反射靶球与霍尔传感器都固定于测头基体上,且两者霍尔传感器的几何中心位于反射靶球的球心的铅垂线,因此,无论是在理论坐标系还是实际坐标系中,反射靶球与霍尔传感器的Y轴和Z轴上的坐标值都相等,仅在Z轴上存在高度差值H的差异。因此,当霍尔传感器在待测二极电磁铁的磁铁气隙中运动时,霍尔传感器的坐标值可以在实际坐标系Frame2中被霍尔测头跟踪系统测定,由此判断霍尔传感器的理论轨迹与实测轨迹之间的误差,并根据误差允许范围对二极电磁铁磁场参数计算值进行校对。
附图说明
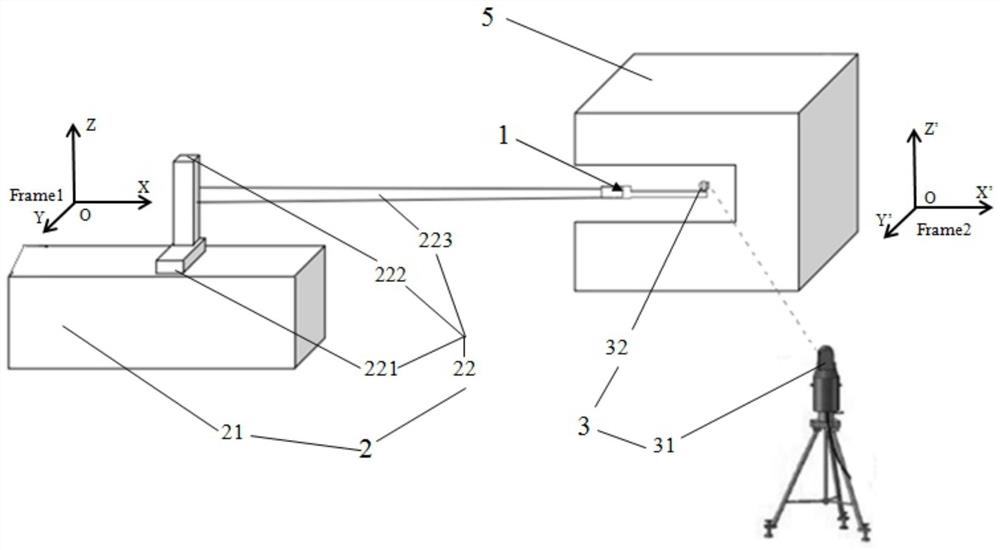
图1为本发明实施例1提供的二极电磁铁磁场参数计算值的检验装置的结构示意图;
图2为本发明实施例1提供的带有霍尔测头及其反射靶球的霍尔测头运动系统的结构示意图;
图3为本发明实施例1提供的带有反射靶球的霍尔测头的侧视图;
图4为本发明实施例1提供的带有反射靶球的霍尔测头的俯视图;
图5为本发明实施例1提供的霍尔测头的基体的侧视图;
图6为本发明实施例1提供的霍尔测头的基体的俯视图;
图7为本发明实施例1提供的二极电磁铁磁场参数计算值的检验装置的内部结构示意图。
具体实施方式
本发明提供一种二极电磁铁磁场参数计算值的检验装置及方法,霍尔测头运动系统用于建立理论坐标系Frame1,霍尔测头跟踪系统用于建立实际坐标系Frame2,由于反射靶球与霍尔传感器都固定于测头基体上,且两者霍尔传感器的几何中心位于反射靶球的球心的铅垂线,因此,无论是在理论坐标系Frame1还是实际坐标系Frame2中,反射靶球与霍尔传感器的Y轴和Z轴上的坐标值都相等,仅在Z轴上存在高度差值H的差异。因此,当霍尔传感器在待测二极电磁铁的磁铁气隙中运动时,霍尔传感器的坐标值可以在实际坐标系Frame2中被霍尔测头跟踪系统测定,由此判断霍尔传感器的理论轨迹与实测轨迹之间的误差,并根据误差允许范围对二极电磁铁磁场参数计算值进行校对。
实施例1
实施例1提供一种二极电磁铁磁场参数计算值的检验装置,下面对其结构进行详细描述。
参考图1、图2和图7,该二极电磁铁磁场参数计算值的检验装置包括霍尔测头1、霍尔测头运动系统2、霍尔测头跟踪系统3和用户计算机4,其中,霍尔测头1设置于待测二极电磁铁5的磁铁气隙中,因此霍尔测头1内部的霍尔传感器11能感应到由待测二极电磁铁5内的磁感应强度,并据此以校正待测二极电磁铁5的磁场参数计算值。
参考图3和图4,霍尔测头1包括一测头基体10,测头基体10内部设置有霍尔传感器11。
其中,参考图5和图6,测头基体10包括套筒部12和靶球杆部13,套筒部12和靶球杆部13的端部对接一体成型,其中套筒部12用于对接霍尔测头运动系统2的探杆223,靶球杆部13的外端用于设置霍尔传感器11和霍尔测头跟踪系统3的反射靶球32。
为了安设霍尔传感器11,靶球杆部13的外端端部设有霍尔传感器槽110,霍尔传感器11设置于霍尔传感器槽110内。
为了给霍尔传感器11输送电流,运动控制器20与霍尔传感器11通过信号线相连接。具体地,靶球杆部13的上表面内开设有线槽100,线槽100的两端分别与霍尔传感器槽110和套筒部12内部相连通。线槽100内安设信号线,霍尔传感器11接受的电流来源于运动控制器20,且该电流值的大小由运动控制器20控制。
继续参考图1和图2,霍尔测头运动系统2包括基座21、三维直角坐标机构22、驱动机构和运动控制器20。
三维直角坐标机构22包括横坐标杆221、纵坐标杆222和探杆223,
横坐标杆221水平设置于基座21上,且横坐标杆221可在基座21上沿着直线左右滑动,这里的左右滑动方向指的是图1中X轴方向;
纵坐标杆222垂直设置于横坐标杆221上,且纵坐标杆222能在横坐标杆221上沿着直线前后滑动,这里的前后滑动方向指的是图1中Y轴方向;
探杆223水平设置于纵坐标杆222上,且探杆223能在纵坐标杆222上沿着直线上下滑动,这里的上下滑动方向指的是图1中Z轴方向。
横坐标杆221、纵坐标杆222和探杆223之间相互垂直,共同构成了由X轴、Y轴和Z轴组成的用于模拟理想状态的理论坐标系Frame1,该理论坐标系Frame1为三维直角坐标系。
驱动机构包括X轴电机、Y轴电机和Z轴电机,其中,
X轴电机的输出轴与横坐标杆221传动连接,用于控制横坐标杆221在基座21上沿着直线左右滑动。作为一种具体的实施方式,X轴电机可以固定于基座21内,且X轴电机的输出轴沿着X轴方向方向设置,X轴电机的输出轴为全螺纹螺杆,横坐标杆221底部固定有螺栓,横坐标杆221底部的螺栓与X轴电机的输出轴通过螺纹连接。
Y轴电机输出轴与纵坐标杆222传动连接,用于纵坐标杆222在横坐标杆221上沿着直线前后滑动。作为一种具体的实施方式,Y轴电机可以固定于横坐标杆221内,且Y轴电机的输出轴沿着Y轴方向方向设置,Y轴电机的输出轴为全螺纹螺杆,纵坐标杆222底部固定有螺栓,纵坐标杆222底部的螺栓与Y轴电机的输出轴通过螺纹连接。
Z轴电机输出轴与探杆223传动连接,用于探杆223在纵坐标杆222上沿着直线上下滑动。作为一种具体的实施方式,Z轴电机可以固定于纵坐标杆222内,且Z轴电机的输出轴沿着Z轴方向方向设置,Y轴电机的输出轴为全螺纹螺杆,探杆223底部固定有螺栓,探杆223底部的螺栓与Y轴电机的输出轴通过螺纹连接。
X轴电机、Y轴电机和Z轴电机分别通过信号线与运动控制器20相连接,当运动控制器20分别控制X轴电机、Y轴电机和Z轴电机启动时,横坐标杆221底部的螺栓、纵坐标杆222底部的螺栓和探杆223底部的螺栓分别带动横坐标杆221、纵坐标杆222和探杆223在各自电机的输出轴上运动,从而实现控制探杆223分别沿着X轴方向、Y轴方向和Z轴方向的三维空间的运动。
三维直角坐标机构22与霍尔测头1对接,具体地,三维直角坐标机构22的探杆223与霍尔测头1的测头基体10的套筒部12对接。由此实现了运动控制器20通过对驱动机构的控制,进而控制了霍尔测头1在待测二极电磁铁5的磁铁气隙内的位置与速度。
参考图1和图3,霍尔测头跟踪系统3包括空间分析器30、激光跟踪仪31、反射靶球32、反射靶球固定装置33,
反射靶球固定装置33包括靶球固定带331和水平压板332,
首先,为了保证水平压板332能保持水平,靶球杆部13的上表面设计为矩形平面。水平压板332水平设置于靶球杆部13的上表面且与霍尔传感器11相接触,反射靶球32设置于水平压板332的外端,反射靶球32位于霍尔传感器11的正上方且霍尔传感器11的几何中心与反射靶球32的球心位于同一铅垂线上。
作为一种具体的实施方式,水平压板332水平设置于靶球杆部13的上表面上且盖设于线槽100,水平压板332的外端下表面与霍尔传感器11相接触;水平压板332的外端的上表面向上凸起形成凸起部3320,凸起部3320的上表面设置为下凹弧面,凸起部3320位于霍尔传感器11的正上方。反射靶球32放置于水平压板332的凸起部3320的下凹弧面内,且霍尔传感器11的几何中心与反射靶球32的球心位于同一铅垂线上。
为了固定反射靶球32,靶球固定带331绑在反射靶球32上且靶球固定带331的两端固定于水平压板332或靶球杆部13上。
为了使反射靶球32的球面与水平压板332的凸起部3320的下凹弧面接触时完全吻合,反射靶球32球面的半径与凸起部3320的下凹弧面的半径都为为0.5英寸。具体地,反射靶球32可以采用0.5英寸陶瓷靶球(英文名称为Reflectors for Fixed Installation,缩写为RFI)或者0.5英寸铝制靶球(英文名称为Tooling Ball Reflector,缩写为TBR)。
作为一种确保霍尔传感器11的几何中心位于反射靶球32的球心的铅垂线上一种具体的实施方式,以提供定位水平压板332和测头基体10之间的装配精准度,靶球杆部13的上表面的线槽100两侧设置有若干个定位孔140,若干个定位销14穿过水平压板332插入测头基体10的若干个定位孔140将靶球杆部13与水平压板332固定连接,且若干个定位销14与靶球杆部13上的若干个定位孔140分别一一对应,以确保水平压板332的凸起部3320的下凹弧面的最低点与霍尔传感器11的几何中心位于同一铅垂线上。
激光跟踪仪31与空间分析器30配合使用,可以通过反射靶球32构建实际坐标系Frame2,其中实际坐标系Frame2的X'轴、Y'轴和Z'轴分别与理论坐标系Frame1的X轴、Y轴和Z轴分别平行。由于反射靶球32与霍尔传感器11都固定于测头基体10上,且两者霍尔传感器11的几何中心位于反射靶球32的球心的铅垂线,因此,无论是在理论坐标系Frame1还是实际坐标系Frame2中,反射靶球32与霍尔传感器11的Y轴和Z轴上的坐标值都相等,仅在Z轴上存在高度差值H的差异。因此,当霍尔传感器11在待测二极电磁铁5的磁铁气隙中运动时,霍尔传感器11的坐标值可以在实际坐标系Frame2中被霍尔测头跟踪系统3测定。
其中,采用激光跟踪仪建立坐标系是成熟技术,如申请号为CN201110286506.X的中国发明专利申请《一种激光跟踪仪构建地理坐标系的方法》以及期刊《机械制造》2015年第10期出版的《一种基于激光跟踪仪的地理坐标系建立方法》均有相关方法的记载。
作为一种具体的实施方式,空间分析器30采用Spatial Analyzer软件。SpatialAnalyzer软件是现有市面上非常成熟的空间分析器,是由美国New River Kinematics公司设计开发的一款应用于工程测量计算的3D计量软件,通过直观的可视化界面,可以连接市面上主流的工程测量仪器,例如:激光跟踪仪、激光全站仪,光学扫描仪,便携式三坐标测量臂等,具有强大丰富的空间元素构建计算功能,支持各种主流CAD格式导入和点云文件分析计算,并具备独创的统一空间测量网络(英文缩写为USMN)平差功能和测量计划编排(英文缩写为MP)功能。
值得注意的是,激光跟踪仪31根据待测二极电磁铁的尺寸大小及形状架设位置,激光跟踪仪31的架设位置满足:当反射靶球32随霍尔传感器11在待测二极电磁铁的气隙内运动过程中,激光跟踪仪31处于能实时跟踪反射靶球32的范围内。
其中,水平压板332的材质为有机玻璃,其长、宽与测头基体10的靶球杆部13的上表面尺寸分别对应相同;测头基体10采用高密度环氧树脂材质,套筒部12为圆柱体,靶球杆部13为半圆柱体或长方体。
霍尔测头运动系统2的基座21采用大理石材质制作而成,探杆223采用碳纤维材质制作而成。
实施例2
实施例2提供二极电磁铁磁场参数计算值的检验方法,采用实施例1提供的二极电磁铁磁场参数计算值的检验装置,在该方法实施前,需要标定出反射靶球32的球心和霍尔传感器11的几何中心之间的高度差值H,该方法包括以下步骤:
步骤S1:根据待测二极电磁铁5及其与霍尔传感器11的相对位置关系计算出的霍尔传感器11在待测二极电磁铁5的气隙内的理论轨迹;
步骤S2:根据计算出的霍尔测头1在待测二极电磁铁5的气隙内的理论轨迹设计霍尔测头1的轨迹点A1、A2,…,An及相应规定点的电流值;
步骤S3:启动霍尔测头运动系统2,使霍尔测头1达到轨迹点A1,并通过运动控制器20向霍尔传感器11输送电流值;
步骤S4:启动霍尔测头跟踪系统3,记录反射靶球32的坐标F(x',y',z'),根据反射靶球32与霍尔传感器11的空间关系,由空间分析器30换算出霍尔传感器11在轨迹点A1中的实际坐标E(x',y',z'+H);
步骤S5:重复步骤S3至步骤S4,直至采集完霍尔传感器11在轨迹点A2,…,An的所有的实际坐标;
步骤S6:将霍尔传感器11在待测二极电磁铁5的气隙内的理论轨迹设计霍尔测头1的轨迹点A1、A2,…,An的理论坐标连成理论轨迹线,将霍尔传感器11在轨迹点A1,A2,…,An中的实际坐标连成实际轨迹线,将理论轨迹线和实际轨迹线的数据和图形进行分析比较,由此判断霍尔传感器11的理论轨迹与实测轨迹之间的误差,并根据误差允许范围对二极电磁铁磁场参数计算值进行校对。
其中,判断霍尔传感器11的理论轨迹与实测轨迹之间的误差是否超出误差允许的范围的一种方法是,误差允许的范围为:小于理论轨迹线的0.5‰;
(1)如果在误差允许的范围内,则可以进行下一步工序,如磁铁铁芯的补偿和修正等;
(2)如果超出误差允许的范围,则需要检查计算的理论测量轨迹是否正确。
虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
- 一种二极电磁铁磁场参数计算值的检验装置及方法
- 一种二极电磁铁磁场参数计算值的检验装置及方法