一种基于激光轮廓传感器的电梯制动器闸瓦间隙检测装置
文献发布时间:2024-01-17 01:14:25
技术领域
本发明涉及一种检测仪器,具体是电梯制动器闸瓦间隙检测装置。
背景技术
电梯制动器是保证电梯安全运行的关键装置。闸瓦式电梯制动器的工作原理,是采用闸瓦抱住曳引机运动部件达到制动的目的;因此需要经常检查闸瓦磨损情况,防止制动器失效造成事故。CN112197715B公开了一种基于图像识别的电梯制动轮与闸瓦间隙检测方法;包括以下步骤:S1:获取电梯制动轮与闸瓦间隙的原始图像,并进行预处理;S2:对预处理过后的图像进行轮廓检测,分别得到制动轮轮廓和闸瓦轮廓;S3:分别对制动轮轮廓和闸瓦轮廓进行弧形轮廓提取,得到两个目标圆弧段;S4:利用两个目标圆弧段计算制动轮与闸瓦间隙的实际宽度;与现有技术相比具有无接触、安全高效等优点。然而,该方法较为复杂,检测步骤较多,检测效率也有待提高。
发明内容
本发明的目的是克服上述背景技术的不足,提供一种基于激光轮廓传感器的电梯制动器闸瓦间隙检测装置,该装置应具有检测快速高效的特点。
本发明提供的技术方案是:
一种基于激光轮廓传感器的电梯制动器闸瓦间隙检测装置,包括底座、可转动地定位在底座上且由电机驱动的丝杆、通过导轨上的滑块定位在底座上且由丝杆带动的激光轮廓传感器、通过数据线连接所述激光轮廓传感器且通过电机驱动器连接电机的工控机以及安装在底座上用于与曳引轮的轮圈夹持固定的两个夹板。
所述底座包括底板以及固定在底板的一端且与底板的长度方向垂直布置的第一连接板和第二连接板。
所述导轨与丝杆平行布置。
所述丝杆螺母与丝杆啮合配合。
所述曳引轮与制动轮同轴布置。
一种基于激光轮廓传感器的电梯制动器闸瓦间隙检测方法,按如下步骤进行:
(1)电梯断电停机,然后把检测装置固定夹在曳引轮的轮圈上,调整丝杆轴线与制动轮踏面轴线L之间的角度小于10度、调整激光轮廓传感器使其发出的一排平行的线激光中心对准闸瓦与制动轮踏面之间的间隙并且与闸瓦端面法线之间的夹角α为40-75度;所述间隙是闸瓦的工作面与相对应的制动轮踏面部位之间的缝隙;所述制动轮踏面是圆柱形制动轮外圆周面与闸瓦工作面相配合部位;
(2)开启电机带动滑块在导轨上作直线运动,从而带动激光轮廓传感器对所述间隙进行线激光扫描;激光轮廓传感器接收的扫描数据也发送给工控机;
(3)工控机读取激光轮廓传感器的扫描数据,从而得到闸瓦间隙及其附近的制动轮表面和闸瓦端面的三维点云;
(4)根据扫描得到的点云数据计算间隙宽度和间隙的不均匀度;
(5)根据计算获得的间隙宽度和不均匀度,判断间隙是否合格。
所述步骤(1)中的一排平行的线激光由若干单束线激光排列形成,排列方向垂直于丝杆轴线;所述线激光垂直于丝杆轴线。
所述步骤(1)中的线激光,是测量范围较窄的2D激光,使得扫描的每个截面数据只包含闸瓦端面和制动轮踏面这两个表面。
所述步骤(3)的扫描数据中,每个截面数据均是在工控机控制下、激光轮廓传感器每移动一个微小距离d之后的线轮廓扫描数据;所述微小距离d为10微米至5000微米。
激光轮廓传感器扫描的次数为N,即激光轮廓传感器移动了N-1次。
所述步骤(5)中的计算步骤如下:
(1)基于3D Hough变换点云平面检测算法,识别属于闸瓦端面的点云;
(2)将剩余的三维点云数据作为制动轮踏面的点云,并对其进行圆柱形制动轮的侧面拟合,得到拟合的制动轮踏面的中心轴线L表达式和半径R;
(3)闸瓦端面的点云中,分别计算每个点到上述制动轮踏面的轴线L的距离,找到其中距离最小的N个点和他们离轴线L的距离D
(4)计算上述N个距离D
(5)计算上述N个距离D
所述制动轮踏面的中心轴线L表达式的拟合方法为:
(1)已知制动轮踏面点云数据集合为(x
假定轴线L的表达式为ax+by+cz+d=0,则求解轴线L表达式的问题可以转换为如下优化问题:
优化目标:
约束条件:a,b,c,d均为实数,不能同时为0;
(2)利用遗传算法求解上述最优化问题,得到的a,b,c,d即为轴线L的表达式的参数,从而得出轴线L表达式。
所述制动轮踏面半径R的计算方法为:
(1)根据空间中点到直线距离公式
(2)得到所有点到轴线L的距离的d
本发明的有益效果是:
由于采用激光轮廓传感器的2D线激光进行检测,不仅能够清楚地测得闸瓦的磨损程度,从而做出是否合格的判断,而且简化了操作步骤和计算工作量,明显提高了工作效率、减少了检测时间,提高了电梯制动器闸瓦间隙检测精度,本发明同时还能计算得到电梯制动器闸瓦间隙的不均匀度,为判断电梯制动器闸瓦工作状况提供量化依据。
附图说明
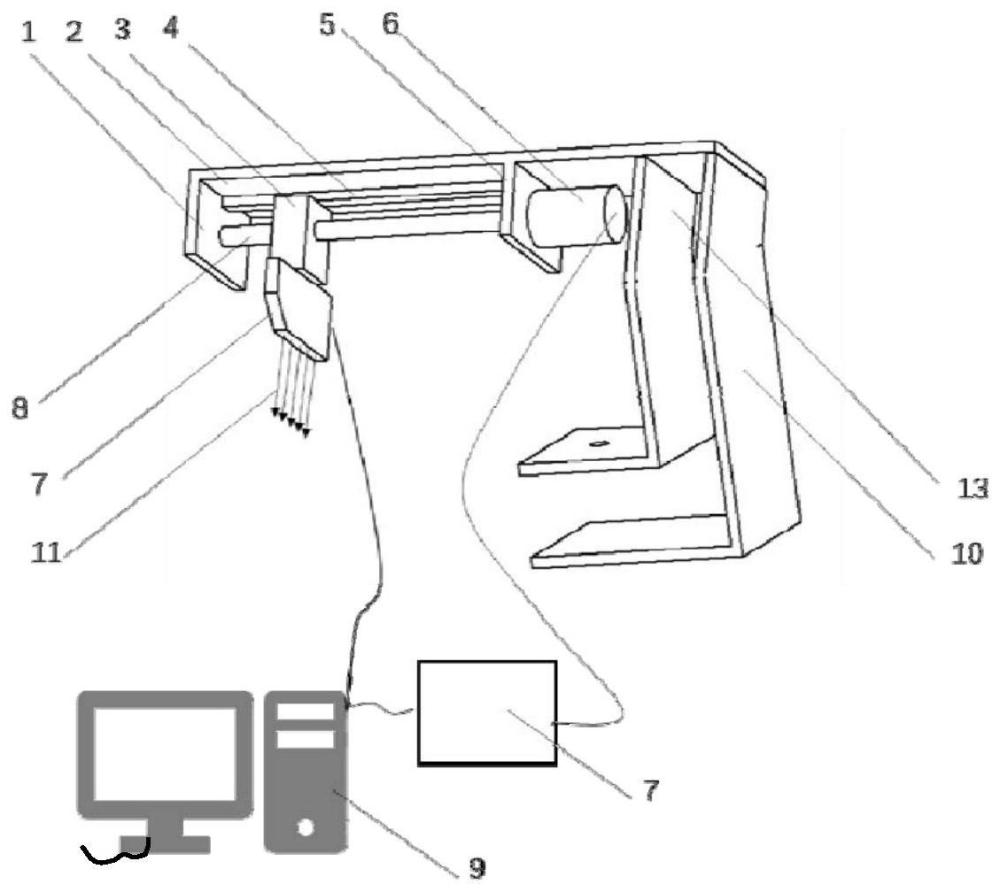
图1是本发明所述装置实施例的主视结构示意图。
图2是实施例中丝杆轴线与制动轮踏面轴线及闸瓦端面的相互位置关系图。
图3是实施例中激光轮廓传感器的线激光与制动轮踏面轴线及闸瓦端面的相互位置图。
图4是实施例中激光轮廓传感器的线激光扫描获得的点云示意图。
图5是图3中的激光轮廓传感器对间隙的扫描检测状态示意图。
图6是实施例中本发明与曳引轮轮圈的位置关系示意图。
图中标记:
第一连接板1、底板2、滑块3、导轨4、第二连接板5、电机6、电机驱动器7、丝杆8、丝杆轴线8-1、工控机9、第一夹板10、线激光11(由激光轮廓传感器12发射)、激光轮廓传感器12、第二夹板13、制动轮14、制动轮踏面14-1、制动轮踏面轴线L、闸瓦15、闸瓦端面15-1、间隙16、三维点云17、轮圈18。
具体实施方式
以下通过附图所示实施例,对本发明作进一步说明。
(1)本发明提供的基于激光轮廓传感器的电梯制动器闸瓦间隙检测装置,包括第一连接板1、底板2、滑块3、横向支撑板4、第二连接板5、电机6、电机驱动器7、丝杆8、工控机9、第一夹板10、线激光11、激光轮廓传感器12、第二夹板13、制动轮14、制动轮踏面14-1、闸瓦15、闸瓦端面15-1、间隙16、三维点云17。
(2)第一夹板10、第二夹板13制作有90度直角的夹头,可以固定夹在曳引轮的轮圈上(如图6),在第二夹板13上制作有螺孔,可通过与螺孔配合的螺栓使得本发明夹紧固定在曳引轮的轮圈上。
(3)第一连接板1、第二连接板5固定在底板的两端,丝杆8的两端分别通过轴承安装在第一连接板、第二连接板上;丝杆上配设有丝杆螺母;电机6固定在第二连接板上,电机输出轴与丝杆8通过联轴器连接。导轨4固定在底板2上并且与丝杆轴线相互平行;滑块3可滑动地定位在导轨上并且与丝杆螺母连接。
(4)激光轮廓传感器12与滑块固定连接,激光轮廓传感器发出的一排平行的线激光由若干单束的线激光11排列形成;线激光的排列方向X垂直于丝杆轴线8-1,线激光的发射方向Z也与丝杆轴线垂直(参见图3)。
(5)电机带动丝杆8旋转时,可以驱动滑块3作直线运动,从而带动激光轮廓传感器进行直线扫描。
(6)电机6和电机驱动器7通过数据线电连接,工控机9控制电机驱动器;激光轮廓传感器12的数据也发送给工控机(配设有显示器)。
工作的时候,首先电梯断电停机。通过第一夹板和第二夹板,把本装置夹持固定在曳引轮的轮圈上;接着通过工控机控制电机旋转,从而转动丝杆推动滑块;通过调整两个夹板位置进而调整激光轮廓传感器,使其发出的一排线激光中心对准准闸瓦与制动轮踏面14-1之间的间隙16并且与闸瓦端面法线之间的夹角α为40-75度,所述间隙是闸瓦的工作面与相对应的制动轮踏面部位之间的缝隙。所述制动轮踏面是圆柱形制动轮的外圆周面上与闸瓦工作面进行摩擦配合的部位。
(7)工作时,工控机控制激光轮廓传感器每移动一个微小距离d之后,工控机即读取一个激光轮廓传感器的线轮廓扫描数据;扫描完成后,即可得到闸瓦间隙及其附近的制动轮表面和闸瓦表面的三维点云17。
(8)采用测量范围较窄的2D激光,避免激光扫到闸瓦背部表面,从而使得扫描的每个截面数据只包含闸瓦端面和制动轮踏面这两个表面。
(9)记录激光轮廓传感器扫描的次数为N,也就是激光轮廓传感器移动了N-1次。
考虑到扫描后的得到包括两个表面的点云数据,分别是闸瓦端面表面和制动轮踏面表面的部分位置。闸瓦端面认为是平面,制动轮踏面是圆柱形制动轮的部分侧面。考虑到激光轮廓传感器的扫描激光不一定跟间隙完全垂直,需要采用下述算法计算闸瓦间隙的宽度。
说明:除图6外,图2-图5中的闸瓦仅显示部分结构。
根据扫描得到的点云数据计算间隙宽度,算法步骤如下:
(1)基于3D Hough变换点云平面检测算法,识别属于闸瓦端面的点云(现有技术,此处不再赘述);
(2)将剩余的三维点数据作为制动轮踏面点云,并对其进行圆柱形制动轮的侧面拟合,得到拟合的制动轮踏面的中心轴线L表达式和半径R;
(3)闸瓦端面的点云中,分别计算每个点到上述制动轮踏面的轴线L的距离,找到其中距离最小的N个点和他们离轴线L的距离Di(i=1,2,…,N);
(4)计算上述这N个距离Di(i=1,2,…,N)的平均值,再减去半径R,作为间隙的宽度;
(5)计算上述这N个距离Di(i=1,2,…,N)的标准差,作为间隙的不均匀度。
(6)根据设定的间隙宽度和不均匀度,判断闸瓦的间隙是否合格。
激光轮廓传感器优选海康公司的MV-DP2060-01H型激光轮廓传感器,测量范围(X轴)在29mm左右,Z轴分辨率可达1.8μm至3.0μm,X轴方向点云数据间隔为12.3μm至16.8μm。基于本发明的设计和算法步骤,可以使得闸瓦间隙宽度的检测精度达到微米级。
实施例1
采用本发明所述装置,对某台电梯制动器闸瓦的间隙进行检测扫描,得到的三维点云数据;
接着针对扫描得到的点云数据,先用基于3D Hough变换点云平面检测算法,识别得到属于闸瓦端面的点云;剩余点云为制动轮踏面点云数据,集合为(xi,yi,zi),i=1,2,…,M,其部分点的坐标数据示例如下:
[10.002,3.015,201.013]
[10.013,3.114,201.101]
[10.242,3.201,199.927]
……
利用前述优化方法(利用遗传算法求解最优化问题,得到的a,b,c,d即为轴线L的表达式的参数,从而得出轴线L表达式),拟合得到的制动轮踏面轴线L表达式为1.009x+0.002y+0.998z+197.213=0;
拟合得到制动轮踏面的半径R=203.5mm;
然后分别计算这些闸瓦端面点云中的每个点到上述踏面轴线L的距离,找到其中距离最小的N个点和他们离轴线L的距离Di(i=1,2,…,N);本实施例中N=10,距离最小的10个点与轴线L的距离分别为203.931,203.928,203.930,203.933,203.929,203.929,203.934,203.927,203.935,203.933,单位mm;
然后计算这10个距离的平均值,再减去半径R,即可得间隙的宽度。
平均值=(203.931+203.928+203.930+203.933+203.929+203.929+203.934+203.927+203.935+203.933)/10
=203.9315;
平均值减去半径R:203.9315-203.5=0.4315mm;
因此,本实例中闸瓦的间隙宽度为0.4315mm。
接下来,计算标准差,它是一组数据偏离平均值的度量。
标准差的计算公式如下:
标准差=sqrt((1/10)×[(203.931-203.9315)2+(203.928-203.9315)2+(203.930-203.9315)2+(203.933-203.9315)2+(203.929-203.9315)2+(203.929-203.9315)2+(203.934-203.9315)2+(203.927-203.9315)2+(203.935-203.9315)2+(203.933-203.9315)2])
=sqrt((1/10)×[0.0000225+0.0002025+0.0000625+0.0002025+0.0000625+0.0000625+0.0002025+0.0003025+0.0003025+0.0002025])
=sqrt(0.001)
=0.0316;
因此,这10个数的标准差为0.0316mm;作为间隙的不均匀度指标。
对照该电梯设定的间隙宽度0.6和不均匀度0.05,可判定该电梯为合格。