一种可重构单元及其所组成的可折展机器人
文献发布时间:2024-01-17 01:19:37
技术领域
本发明属于机器人技术领域,尤其涉及一种可重构单元及其所组成的可折展机器人。
背景技术
折展机器人能够模仿形如动物大象的鼻子、章鱼的抓手等代替人类在复杂非结构化环境中完成许多高危作业工作,在军事、矿山开采、星球探测、消防营救等领域有着广阔的应用前景。
传统的折展机器人通常能够折合、展开,实现体积大小的变化。但是,体积大小的变化较小,不能弯曲,在模仿动物时,往往动作简单,运动和姿势单一。因其不能弯曲,对于需要弯曲抱拿和卷拿才能搬移的圆形、曲面体类结构的物体,无法开展工作,工作效率较低,灵活性较差,适用范围较小。特别是不能将其作为重构单元,采用多个组成体积大小的变化大、弯曲度大、工作效率高、灵活性好、适用范围大的可折展机器人。
发明内容
针对上述现有技术所存在的技术问题,本发明要解决的技术问题是提供一种可重构单元及其所组成的可折展机器人,其可重构单元的体积大小的变化较大,能够弯曲、动作多变,运动和姿势丰富,弯曲度和灵活性好,工作效率较高,适用范围较广泛;特别是能够将多个可重构单元组成体积大小的变化更大、弯曲度更大、工作效率更高、灵活性更好、适用范围更大的可折展机器人。
为解决上述技术问题,本发明的可重构单元,其特征在于:包括;均为三角形结构的下平台和上平台,
包含依次连接的转动副Ⅰ、下连杆Ⅰ、移动副Ⅰ、上连杆Ⅰ和球副Ⅰ的支链Ⅰ,
包含依次连接的转动副Ⅱ、下连杆Ⅱ、移动副Ⅱ、上连杆Ⅱ和球副Ⅱ的支链Ⅱ,
以及包含依次连接的转动副Ⅲ、下连杆Ⅲ、移动副Ⅲ、上连杆Ⅲ和球副Ⅲ的支链Ⅲ;
所述支链Ⅰ的转动副Ⅰ、支链Ⅱ的转动副Ⅱ和支链Ⅲ的转动副Ⅲ的轴线均布置于下平台所在的同一个水平面内且均分别与下平台的AB边、BC边和CA边相垂直,
所述支链Ⅰ的转动副Ⅰ可转动地连接于下平台的AB边上靠近夹角Ⅰ处,其球副Ⅰ在上平台的夹角Ⅴ的附近与上平台可相对三个自由度转动地连接;
所述支链Ⅱ的转动副Ⅱ可转动地连接于下平台的BC边上靠近夹角Ⅱ处,其球副Ⅱ在上平台的夹角Ⅵ的附近与上平台可相对三个自由度转动地连接;
所述支链Ⅲ的转动副Ⅲ可转动地连接于下平台的CA边上靠近夹角Ⅲ处,其球副Ⅲ在上平台的夹角Ⅳ的附近可相对三个自由度转动地连接。
优选地,所述下平台和上平台均为等边三角形。
优选地,所述支链Ⅰ的转动副Ⅰ、下连杆Ⅰ、移动副Ⅰ、上连杆Ⅰ和球副Ⅰ与支链Ⅱ的转动副Ⅱ、下连杆Ⅱ、移动副Ⅱ、上连杆Ⅱ和球副Ⅱ,以及支链Ⅲ的转动副Ⅲ、下连杆Ⅲ、移动副Ⅲ、上连杆Ⅲ和球副Ⅲ的结构尺寸相同。
优选地,所述支链Ⅰ的下连杆Ⅰ和上连杆Ⅰ、支链Ⅱ的下连杆Ⅱ和上连杆Ⅱ,以及支链Ⅲ的下连杆Ⅲ和上连杆Ⅲ的与长度方向垂直的截面形状均为矩形或者圆形。
与现有技术相比,本发明的可重构单元能够在下列状态下开展工作;
1、初始展开状态时,在驱动支链Ⅰ中的移动副Ⅰ、支链Ⅱ的移动副Ⅱ和支链Ⅲ的移动副Ⅲ、带动其中的下连杆Ⅰ和上连杆Ⅰ、下连杆Ⅱ和上连杆Ⅱ,以及下连杆Ⅲ和上连杆Ⅲ相互靠近,或驱动转动副Ⅰ、转动副Ⅱ和转动副Ⅲ,以及球副Ⅰ、球副Ⅱ和球副Ⅲ转动,使各支琏中的上、下连杆与各对应移动副连接的连接端相靠贴合而收缩、并使各支琏逐渐缩短长度,直至上平台、各支琏和下平台依次重叠贴合,实现折合收缩、体积变小。
2、折合收缩状态时,在驱动支链Ⅰ中的移动副Ⅰ、支链Ⅱ的移动副Ⅱ和支链Ⅲ的移动副Ⅲ、带动其中的下连杆Ⅰ和上连杆Ⅰ、下连杆Ⅱ和上连杆Ⅱ,以及下连杆Ⅲ和上连杆Ⅲ相互离开,或驱动转动副Ⅰ、转动副Ⅱ和转动副Ⅲ,以及球副Ⅰ、球副Ⅱ和球副Ⅲ转动,使各上、下连杆与各移动副连接的连接端相互离开而使各支琏逐渐增长长度,直至恢复初始的展开状态,实现展开、体积变大。
3、由初始展开状态渐变为折合收缩状态或者由折合收缩状态渐变为初始展开状态的过程中,驱动其中任何两条支链中的移动副运动并带动与之相连接的相应的上、下杆的连接端相互靠近或者相互离开,或驱动相对应的两个转动副;而另外一条支链中驱动移动副或驱动转动副锁死。在这个过程中,被驱动的相互靠近或者相互离开的上、下杆就会逐渐缩短或者增长长度,并带动下平台相应边向下或者向上倾斜,从而实现弯曲、且体积大小也随之变化。
可见,本发明的可重构单元不仅具有能够折合、展开的优点,还具有能够弯曲的优点,结构灵活多变,运动、姿势较丰富,形状、体积变化较大,能够在弯曲程度较大的复杂环境中做比较复杂的工作,抱拿和卷拿圆形、曲面体类结构的物体,工作效率较高,灵活性较好,具有广泛的应用前景。
本发明的可重构单元所组成的可折展机器人,其特征在于:包含至少两个以上的可重构单元,所述两个以上的可重构单元中的每个可重构单元的上平台的顶面设有上连接件,下平台的底面设有下连接件,所述可折展机器人通过两个以上的可重构单元的上连接件和下连接件可拆卸地连接组成。
优选地,所述上连接件和下连接件均为磁铁,且上连接件的顶面为N磁极或S磁极,相对应地,下连接件的底面为S磁极或N磁极。
优选地,所述上连接件和下连接件分别为卡钩和卡环。
优选地,所述上连接件和下连接件分别为卡扣和卡槽。
优选地,所述上连接件和下连接件分别为螺孔和螺柱。
优选地,所述上连接件和下连接件均为带毛剌的粘合片。
本发明的可重构单元所组成的可折展机器人,能够在下列状态下开展工作;
1、初始展开状态时,在驱动每个可重构单元中的支链Ⅰ的移动副Ⅰ、支链Ⅱ的移动副Ⅱ和支链Ⅲ的移动副Ⅲ、带动与之相连接的下连杆Ⅰ和上连杆Ⅰ、下连杆Ⅱ和上连杆Ⅱ,以及下连杆Ⅲ和上连杆Ⅲ的连接端相互靠近,或驱动相对应的转动副Ⅰ、转动副Ⅱ和转动副Ⅲ,以及球副Ⅰ、球副Ⅱ和球副Ⅲ转动,使每个可重构单元中的各支琏中的上、下连杆与对应的移动副连接的连接端相靠贴合而收缩,并使各支琏逐渐缩短长度,直至上平台、各支琏和下平台依次重叠贴合,实现各个可重构单元的折合收缩,从而实现整个可折展机器人的折合收缩、体积变小。
2、折合收缩状态时,在驱动每个可重构单元中的支链Ⅰ的移动副Ⅰ、支链Ⅱ的移动副Ⅱ和支链Ⅲ的移动副Ⅲ、带动与之相连接的下连杆Ⅰ和上连杆Ⅰ、下连杆Ⅱ和上连杆Ⅱ,以及下连杆Ⅲ和上连杆Ⅲ相互离开,或驱动相对应的转动副Ⅰ、转动副Ⅱ和转动副Ⅲ,以及球副Ⅰ、球副Ⅱ和球副Ⅲ转动,使每个可重构单元中的各支琏中的上、下连杆与对应的移动副连接的连接端相互离开而使各支琏逐渐增长长度,直至每个可重构单元恢复展开状态,从而实现整个可折展机器人的展开、体积变大。
3、由展开状态渐变为折合收缩状态或者由折合收缩状态渐变为展开状态的过程中,驱动每个可重构单元中的其中任何两条支链中的移动副相向或者相离运动并带动与之相连接的相应上、下杆相互靠近或者相互离开,或驱动相对应的两个转动副;而另外一条支链中驱动移动副或驱动转动副锁死。在这个过程中,被驱动的每个可重构单元中的相互靠近或者相互离开的上、下杆就会逐渐缩短或者增长长度,并带动下平台相应边向下或者向上倾斜,实现每个可重构单元的弯曲,从而实现整个可折展机器人的弯曲。
可见,本发明的可重构单元所组成的可折展机器人,因其由至少两个以上的可重构单元组成,相比于单个的可重构单元,两个以上的可重构单元组成的可折展机器人,其体积变化大小的范围更大,弯曲度更大,每次弯曲而抱拿、卷拿并搬移的圆形、曲面体类结构的物体更多,工作效率更高。且整体结构比较简单、组装、维修、更换均比较方便容易。
同时,还可根据实际需要,将三个及以上的可重构单元组成可折展机器人。很明显,这样所组成的可折展机器人,其与由两个可重构单元所组成的可折展机器人相比,弯曲度更加大,每次弯曲而抱拿、卷拿并搬移的圆形、曲面体类结构的物体更加多,工作效率就更加高,灵活度更加好,适用范围更加广泛。
附图说明
图1是本发明中一种可重构单元的展开状态示意图;
图2是本发明的一种可重构单元的折合收缩状态示意图;
图3是本发明的一种可重构单元的弯曲状态示意图;
图4是本发明的一种可重构单元所组成的可折展机器人的展开状态示意图;
图5是本发明的一种可重构单元所组成的可折展机器人的折合收缩状态示意图;
图6是本发明的一种可重构单元所组成的可折展机器人的弯曲状态示意图。
具体实施方式
下面结合附图对本发明的优选实施方式做详细说明。
需要理解的是,在本发明的描述中,术语“水平”、“垂直”、“顶部”、“底部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述发明和简化描述,而不是指示或暗示所指的组成部分必须具有特定的方位、并以特定的方位构造和操作。因此不能理解为对本发明的限制。
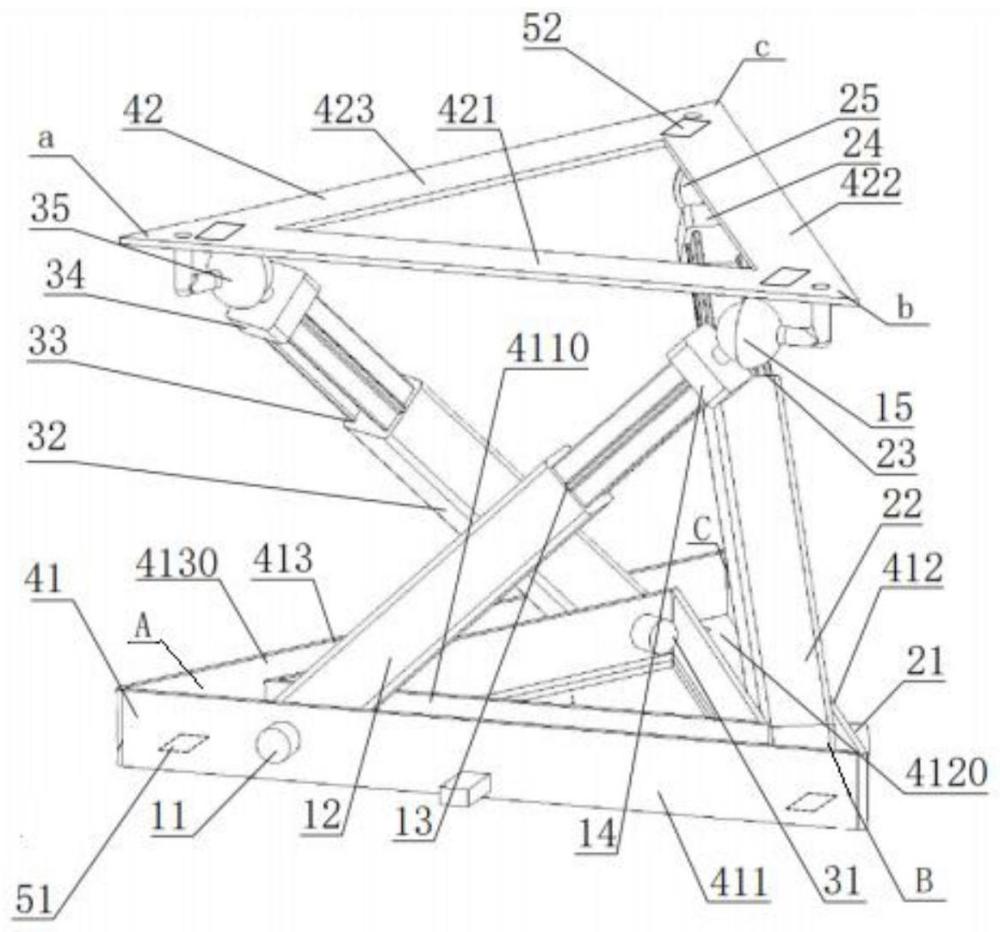
参见图1至图3,本发明的可重构单元,包括;均为三角形结构的下平台41和上平台42;包含依次连接的转动副Ⅰ11、下连杆Ⅰ12、移动副Ⅰ13、上连杆Ⅰ14和球副Ⅰ15的支链Ⅰ,包含依次连接的转动副Ⅱ21、下连杆Ⅱ22、移动副Ⅱ23、上连杆Ⅱ24和球副Ⅱ25的支链Ⅱ,以及包含依次连接的转动副Ⅲ31、下连杆Ⅲ32、移动副Ⅲ33、上连杆Ⅲ34和球副Ⅲ35的支链Ⅲ;所述支链Ⅰ的转动副Ⅰ11、支链Ⅱ的转动副Ⅱ21和支链Ⅲ的转动副Ⅲ31的轴线均布置于下平台41所在的同一个水平面内且均分别与下平台41的AB边411、BC边412和CA边413相垂直,所述支链Ⅰ的转动副Ⅰ11可转动地连接于下平台的AB边411上靠近夹角ⅠA处,其球副Ⅰ15在上平台42的夹角Ⅴb的附近与上平台42可相对三个自由度转动地连接;所述支链Ⅱ的转动副Ⅱ21可转动地连接于下平台41的BC边412上靠近夹角ⅡB处,其球副Ⅱ25在上平台42的夹角Ⅵc的附近与上平台42可相对三个自由度转动地连接;所述支链Ⅲ的转动副Ⅲ31可转动地连接于下平台41的CA边413上靠近夹角ⅢC处,其球副Ⅲ35在上平台42的夹角Ⅳa的附近与上平台42可相对三个自由度转动地连接;初始展开状态时或者折合收缩状态时,所述下平台41的AB边411、BC边412和CA边413,以及AB边411与CA边413的夹角ⅠA、AB边411与BC边412的夹角ⅡB、BC边412与CA边413的夹角ⅢC,分别与上平台42的ab边421、bc边422和ca边423,以及ab边421与ca边423的夹角Ⅳa、ab边421与bc边422的夹角Ⅴb、bc边422与ca边423的夹角Ⅵc一一相对应。
于是,本发明的可重构单元能够在下列状态下开展工作;
1、初始展开状态时,在驱动支链Ⅰ中的移动副Ⅰ13、支链Ⅱ的移动副Ⅱ23和支链Ⅲ的移动副Ⅲ33、带动其中的下连杆Ⅰ12和上连杆Ⅰ14、下连杆Ⅱ22和上连杆Ⅱ24,以及下连杆Ⅲ32和上连杆Ⅲ34相互靠近,或驱动转动副Ⅰ11、转动副Ⅱ21和转动副Ⅲ31,带动球副Ⅰ15、球副Ⅱ25和球副Ⅲ35转动,能够使各支琏中的上、下连杆与各对应移动副连接的连接端相靠贴合而收缩、并使各支琏逐渐缩短长度,直至上平台42、各支琏和下平台41依次重叠贴合,实现折合收缩、体积变小。
2、折合收缩状态时,在驱动支链Ⅰ中的移动副Ⅰ13、支链Ⅱ的移动副Ⅱ23和支链Ⅲ的移动副Ⅲ33、带动其中的下连杆Ⅰ12和上连杆Ⅰ14、下连杆Ⅱ22和上连杆Ⅱ24,以及下连杆Ⅲ32和上连杆Ⅲ34相互离开,或驱动转动副Ⅰ11、转动副Ⅱ21和转动副Ⅲ31,带动球副Ⅰ15、球副Ⅱ25和球副Ⅲ35转动,使各上、下连杆与各移动副连接的连接端相互离开而使各支琏逐渐增长长度,直至恢复初始的展开状态,实现展开、体积变大。
3、由初始展开状态渐变为折合收缩状态或者由折合收缩状态渐变为初始展开状态的过程中,驱动其中任何两条支链中的移动副运动并带动与之相连接的相应的上、下杆的连接端相互靠近或者相互离开,或驱动相对应的两个转动副;而另外一条支链中驱动移动副或驱动转动副锁死。在这个过程中,被驱动的相互靠近或者相互离开的上、下杆就会逐渐缩短或者增长长度,并带动下平台41相应边向下或者向上倾斜,从而实现弯曲、且体积大小也随之变化。
可见,本发明的可重构单元不仅具有能够折合、展开的优点,还具有能够弯曲的优点,结构灵活多变,运动、姿势较丰富,形状、体积变化较大,能够在弯曲程度较大的复杂环境中做比较复杂的工作,抱拿和卷拿圆形、曲面体类结构的物体,工作效率较高,灵活性较好,具有广泛的应用前景。
参见图1,所述下平台41和上平台42均优选为等边三角形。使得下平台41和上平台42的受力比较均衡、本发明整体工作比较稳定。
所述支链Ⅰ的转动副Ⅰ11、下连杆Ⅰ12、移动副Ⅰ13、上连杆Ⅰ14和球副Ⅰ15与支链Ⅱ的转动副Ⅱ21、下连杆Ⅱ22、移动副Ⅱ23、上连杆Ⅱ24和球副Ⅱ25,以及支链Ⅲ的转动副Ⅲ31、下连杆Ⅲ32、移动副Ⅲ33、上连杆Ⅲ34和球副Ⅲ35的结构尺寸优选均相同。这使得支链Ⅰ、支链Ⅱ和支链Ⅲ能够进行标准化生产,加工制造比较简单,互换性较好,装配和维修比较方便容易。
参见图1,所述支链Ⅰ的下连杆Ⅰ12和上连杆Ⅰ14、支链Ⅱ的下连杆Ⅱ22和上连杆Ⅱ24,以及支链Ⅲ的下连杆Ⅲ32和上连杆Ⅲ34的与长度方向垂直的截面形状均优选为矩形,也可以均优选为圆形或者椭圆形。这使得支链Ⅰ的下连杆Ⅰ12和上连杆Ⅰ14、支链Ⅱ的下连杆Ⅱ22和上连杆Ⅱ24,以及支链Ⅲ的下连杆Ⅲ32和上连杆Ⅲ34的结构更简单、加工制造更容易。
参见图3至图6,本发明的可重构单元所组成的可折展机器人,包含至少两个以上的可重构单元,所述两个以上的可重构单元中的每个可重构单元的上平台42的顶面设有上连接件52,下平台41的底面设有下连接件51,所述可折展机器人通过两个以上的可重构单元的上连接件52和下连接件51可拆卸地连接组成。
因而,本发明的可重构单元所组成的可折展机器人,能够在下列状态下开展工作;
1、初始展开状态时,在驱动每个可重构单元中的支链Ⅰ的移动副Ⅰ13、支链Ⅱ的移动副Ⅱ23和支链Ⅲ的移动副Ⅲ33、带动与之相连接的下连杆Ⅰ12和上连杆Ⅰ14、下连杆Ⅱ22和上连杆Ⅱ24,以及下连杆Ⅲ32和上连杆Ⅲ34的连接端相互靠近,或驱动相对应的转动副Ⅰ11、转动副Ⅱ21和转动副Ⅲ31,以及球副Ⅰ15、球副Ⅱ25和球副Ⅲ35转动,使每个可重构单元中的各支琏中的上、下连杆与对应的移动副连接的连接端相靠贴合而收缩,并使各支琏逐渐缩短长度,直至上平台42、各支琏和下平台41依次重叠贴合,实现各个可重构单元的折合收缩,从而实现整个可折展机器人的折合收缩、体积变小。
2、折合收缩状态时,在驱动每个可重构单元中的支链Ⅰ的移动副Ⅰ、支链Ⅱ的移动副Ⅱ23和支链Ⅲ的移动副Ⅲ33、带动与之相连接的下连杆Ⅰ12和上连杆Ⅰ14、下连杆Ⅱ22和上连杆Ⅱ24,以及下连杆Ⅲ32和上连杆Ⅲ34相互离开,或驱动相对应的转动副Ⅰ11、转动副Ⅱ21和转动副Ⅲ31,以及球副Ⅰ15、球副Ⅱ25和球副Ⅲ35转动,使每个可重构单元中的各支琏中的上、下连杆与对应的移动副连接的连接端相互离开而使各支琏逐渐增长长度,直至每个可重构单元的恢复展开状态,从而实现整个可折展机器人的展开、体积变大。
3、由展开状态渐变为折合收缩状态或者由折合收缩状态渐变为展开状态的过程中,驱动每个可重构单元中的其中任何两条支链中的移动副相向或者相离运动并带动与之相连接的相应上、下杆相互靠近或者相互离开,或驱动相对应的两个转动副;而另外一条支链中驱动移动副或驱动转动副锁死。在这个过程中,被驱动的每个可重构单元中的相互靠近或者相互离开的上、下杆就会逐渐缩短或者增长长度,并带动下平台41相应边向下或者向上倾斜,实现每个可重构单元的弯曲,从而实现整个可折展机器人的弯曲。
同时,还可根据实际需要,将三个及以上的可重构单元组成可折展机器人。很明显,这样组成的可折展机器人,其与由两个可重构单元组成的可折展机器人相比,弯曲度更加大,每次弯曲而抱拿、卷拿并搬移的圆形、曲面体类结构的物体更加多,工作效率更加高,灵活度更加好,适用范围更加广泛。
参见图1,所述上连接件52和下连接件51均为磁铁,且上连接件52的顶面优选为N磁极或S磁极,相对应地,下连接件51的底面优选为S磁极或N磁极。所述上连接件52和下连接件51可分别各有三块或者三条,并分别安装于下平台41的顶面的各个夹角处或者各条边顶面的中部,以及上平台42的底面对应的各个夹角处或者各条边底面的中部。这使得上连接件52和下连接件51的结构比较简单,连接比较方便容易,从而使得整个可折展机器人的组成、维修也比较简单容易。
所述上连接件52和下连接件51分别优选为卡钩和卡环。
所述上连接件52和下连接件51分别优选为卡扣和卡槽。
所述上连接件52和下连接件51分别优选为螺孔和螺柱。
所述上连接件52和下连接件51优选均为带毛剌的粘合片。
为简化起见,上述卡钩和卡环、卡扣和卡槽、螺孔和螺柱、带毛剌的粘合片均未画出,且可分别各有三个,并分别位于下平台41的顶面的各个夹角处或者各条边顶面的中部或者位于各条边的垂直面的中部,以及上平台42的底面对应的各个夹角处或者各条边底面的中部或者位于各条边的垂直面的中部。这同样使得上连接件52和下连接件51的结构比较简单,连接比较方便容易,从而使得整个可折展机器人的组成、维修也比较简单容易。
参见图1,在一种可重构单元和一种可重构单元所组成的可折展机器人中,所述下平台41的AB边411、BC边412和CA边413上分别设有可容纳各支琏处于其上、下杆的相邻端靠贴状态时的上方开口的容纳腔Ⅰ4110、容纳腔Ⅱ4120和容纳腔Ⅲ4130,且所述支链Ⅰ的转动副Ⅰ11连接于下平台41的AB边411上的容纳腔Ⅰ4110中靠近夹角ⅠA处,所述下连杆Ⅰ12的一端通过转动副Ⅰ11与下平台41可相对转动地连接、另一端通过移动副Ⅰ13与上连杆Ⅰ14可相对移动地连接,所述上连杆Ⅰ14的另一端通过球副Ⅰ15在上平台42的夹角Ⅴb的附近与上平台42可相对三个自由度转动地连接;所述支链Ⅱ的转动副Ⅱ21连接于下平台41的BC边412上的容纳腔Ⅱ4120中靠近夹角ⅡB处,所述下连杆Ⅱ22的一端通过转动副Ⅱ21与下平台41可相对转动地连接、另一端通过移动副Ⅱ23与上连杆Ⅱ24的一端可相对移动地连接,所述上连杆Ⅱ24的另一端通过球副Ⅱ25在上平台42的夹角Ⅵc的附近与上平台42可相对三个自由度转动地连接;所述支链Ⅲ的转动副Ⅲ31连接于下平台41的CA413边上的容纳腔Ⅲ4130中靠近夹角ⅢC处,所述下连杆Ⅲ32的一端通过转动副Ⅲ31与下平台41可相对转动地连接、另一端通过移动副Ⅲ33与上连杆Ⅲ34的一端可相对移动地连接,所述上连杆Ⅲ34的另一端通过球副Ⅲ35在上平台42的夹角Ⅳa的附近可相对三个自由度转动地连接。于是,在一种可重构单元和一种可重构单元所组成的可折展机器人分别实现折合收缩、体积变小、各支琏处于其上、下杆的相邻端靠贴状态的折合状态下,能将各支琏完全容纳入下平台41上的各个容纳腔,折合性良好。特别是能够将各支琏上的球副约束于对话应的容纳腔中而不能转动并带动与之连接的上平台42转动,从而折合的稳定性良好。
本发明没有详细说明的内容,包括但不限于驱动装置等,均为现有技术。
上面结合附图对本发明的优选实施方式做了详细说明,但是本发明并不限于上述实施方式,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。