一种多场景应用机器人及多场景应用控制方法
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及机器人,尤其涉及一种多场景应用机器人及多场景应用控制方法。
背景技术
随着技术的不断发展,在室外工作的移动机器人日益受到青睐,尤其是应用于复杂环境中运送物资的移动机器人。如面对类似于灾后等复杂环境物资的运送,一般由人力完成,工作强度大,危险系数高。但是,虽然借助传统的履带式移动机器人,可以越过某些障碍运输物资,但其机动性相对较差且功耗更高,相对于轮式需要花更多的时间。在安全救援、勘探资源、军事行动等应用场景中,传统轮式移动机器人虽然具有较强的越障能力,但是在越障的过程中车体姿态变化幅度大,无法提供一个稳定的运输平台,较难执行物资运输等特种任务,限制了移动机器人的功能范围。
另一方面,在复杂环境中不仅有陆地的障碍需要逾越,还有河流需要越过。此时传统的履带式移动机器人无法做到适应复杂多变的环境,还需要人力完成,与此同时面对物资的运输尤其是类似于雷达生命探测仪等救灾用精密仪器的运输,很难保障其在运输过程中不被损坏。
此外,轮式移动机器人在工作场景中,需要轮式移动机器人具有涉水功能,而传统水面机器人虽然满足水面作业要求,但是不具备陆地作业要求。因此,目前传统特种机器人在面对路况条件差,越野能力要求高的情况,传统特种机器人无法满足执行的任务要求,尤其是要求特种机器人在水、陆两种条件下工作时,传统特种机器人并不满足在越障过程中保持车身姿态稳定和水路两栖的能力。
一种具有多种运动模式的水陆两栖移动机器人(CN202110487352.4)中,该移动机器人将水面机器人与陆地机器人相结合,既可在陆地上行走又可在水中游动,能够轻松适应两种工作环境,但该移动机器人所需要的动力要求高,动力模块的输出力矩需求大,并且其转弯半径较大不适合应用于复杂的地形环境;一种全轮同相位驱动小车及其转弯控制方法(CN201610368782.3)公开了一种全轮同相位驱动小车及其转弯控制方法,可供移动机器人、越障车等需要在非平整地面和平整地面行走,但这种方法无法适应陆地和水上两种工作环境;一种水陆两栖越障机器人(CN202210526045.7)公开一种水陆两栖越障机器人,其包括壳体,旋转机构和多个弧形桨叶,实现了适应水陆两种工作环境,解决了轮式越障能力不足的问题,但其承载能力较差,轮子在在重载下非常易损坏,弧形桨叶承载能力不强,在其轮式变形过程中弧形桨叶极易损坏。
发明内容
发明目的:针对现有技术中灾后等复杂环境物资运输,尤其是应用于运输如红外热像仪、雷达生命探测仪精密仪器时避免损坏的现状,本发明提出一种多场景应用机器人及多场景应用控制方法,在进行水陆两种工作环境的同时,解决了灾后复杂环境下物资运输的技术问题。
技术方案:本发明多场景应用机器人包括车体模块、隔震平台模块、悬架模块、桨叶模块、横向弹簧阻尼、支撑腹板和移动轮;隔震平台模块上设有陀螺仪传感器和扫描仪;
隔震平台模块固定在车体模块上;支撑腹板位于车体模块的两侧;横向弹簧阻尼与支撑腹板和悬架模块连接进行减震;桨叶模块位于两个悬架模块之间;车体模块的底板组件内为空腔;
悬架模块包括悬架连接组件、第二电机和传动轴,悬架连接组件的两侧有悬架侧板和悬架中板,悬架侧板和悬架中板的侧面设有连接有悬架弹簧阻尼的悬架侧边板,悬架弹簧阻尼的一端与悬架连接组件连接;第二电机通过传动轴传递转矩至悬架模块。
隔震平台模块包括第一电机、减速器和腹板,腹板的上方设有隔震平台,隔震平台上连接有滚珠丝杆和螺母,第一电机通过减速器驱动滚珠丝杆。
车体模块还包括连接柱和连接肋板,连接柱和连接肋板位于底板组件与腹板之间。
桨叶模块包括桨叶、第三电机和第二减速器,第三电机通过第二减速器与桨叶连接。
扫描仪位于隔震平台的上方检测障碍物的高度。
本发明多场景应用机器人在多场景下的应用控制方法包括以下步骤:
(1)在地面场景下,若悬架侧边板下降,则关闭第三电机停止桨叶运转,开启电机驱动移动轮转动,进行地面上的驱动、越障,以及变向;若悬架侧边板抬起,则启动悬架弹簧阻尼收缩,将悬架侧边板向下降至设定角度后,悬架弹簧阻尼停止收缩,使悬架侧边板处于下降状态,重复上述步骤;
(2)在水上场景下,若悬架侧边板抬起,则关闭电机停止移动轮运转,开启第三步进电机,并通过第二减速器驱动桨叶转动,进而驱动移动机器人在水上运动和转向;若悬架侧边板下降,则启动悬架弹簧阻尼将悬架侧边板向上抬起设定角度后,关闭悬架弹簧阻尼,使悬架侧边板处于抬起状态,重复上述步骤;
(3)通过陀螺仪传感器将检测的机器人的震动幅度和倾斜角度转化成脉冲信号传递给步进电机,步进电机通过滚珠丝杆驱动隔震平台移动,对机器人减震。
步骤(1)中,机器人的越障的方法如下:
(1)当机器人遇到高障碍时,扫描仪扫描检测障碍物高度h,得到悬架模块所需转过角度;
(2)将角度转换为脉冲信号发送给第二步进电机,第二步进电机转动相应角度,产生转矩;
(3)转矩通过第一减速器,由传动轴传递给悬架中板;
(4)转矩作用在悬架中板上,使悬架模块向上抬起角度θ,以此越过障碍。
步骤(1)中,当机器人遇到高障碍时,扫描仪扫描检测障碍物高度h,通过公式
步骤(3)中,多场景应用机器人的多方向减震控制过程如下:
(1)当遇到颠簸路面时,悬架弹簧阻尼伸缩对机器人所受的纵向力缓冲;
(2)机器人所受横向力传递到横向弹簧阻尼,横向弹簧阻尼通过伸缩对横向力缓冲;
(3)经过纵向与横向缓冲过后的力,通过支撑腹板传递到车体模块进行机器人的多方向减震。
步骤(3)中,机器人的隔震平台的减震过程如下:
(1)当遇到颠簸路面时,陀螺仪传感器采集机器人的震动幅度及倾斜程度;
(2)将陀螺仪传感器采集的信息处理形成脉冲信号传递给第一步进电机;
(3)第一步进电机转动,驱动滚珠丝杆旋转,驱动螺母移动;
(4)螺母带动隔震平台移动,使隔震平台模块的重心改变,对隔震平台减震。
有益效果:与现有技术相比,本发明具有以下优点:
(1)本发明的多场景应用机器人实现了适应水陆两种工作环境,且悬架模块将纵向减震与横向减震相结合,减缓了车体上下方向及前后方向的震动及实现了多个方向减震,同时结合了非独立悬架结构简单及独立悬架彼此没有干涉,降低车身震动及倾斜程度的优点,并且当越过高障碍物时,悬架模块通过电机驱动向上抬起,以此来越过一般轮式移动机器人无法越过的障碍物,悬架模块使移动轮式机器人有更优越的越障性能。
(2)隔震平台模块的陀螺仪传感器,收集机器人的震动幅度和倾斜程度,通过控制系统给隔震平台模块的步进电机发送信号,使其驱动隔震平台定向移动,使得隔震平台模块的重心发生相应改变,从而实现了主动化隔震,在原来的基础上进一步增强减震能力,保障了复杂环境中运输过程物资,尤其避免了如红外热像仪、雷达生命探测仪等精密仪器不被损坏,例如需要通过河流时,悬架模块减震失效,此时通过隔震平台的定向移动来降低由于河流波浪产生的车身震动对放置在隔震平台上的物资的影响,确保物资不会落入水中受到损坏。
(3)本发明机器人两侧的桨叶模块,在水上时通过桨叶模块中电机得电带动桨叶转动实现水面上的移动,在地面时桨叶模块断电,通过使麦克纳姆轮得电实现地面移动,通过不同工作环境下启动模块的切换,进而适应水陆两种工作环境。
附图说明
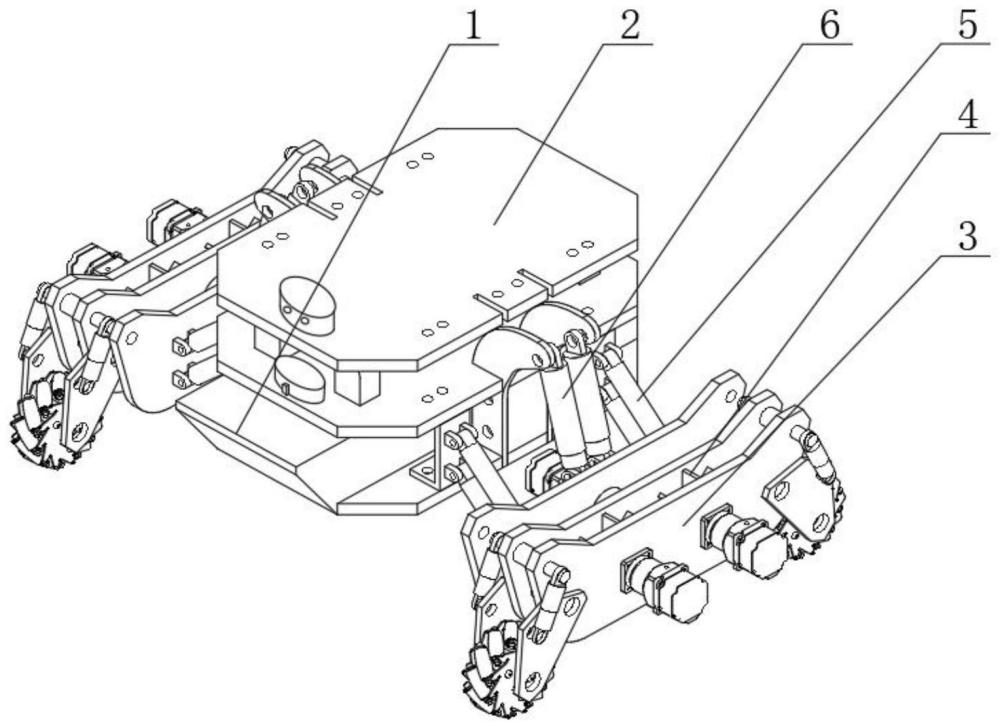
图1是本发明多场景应用机器人的立体结构示意图;
图2是本发明多场景应用机器人的主视结构示意图;
图3是本发明多场景应用机器人的右视结构示意图;
图4是本发明多场景应用机器人的车体模块结构示意图;
图5是本发明多场景应用机器人的隔震平台模块结构示意图;
图6是本发明多场景应用机器人的悬架模块结构示意图;
图7是本发明多场景应用机器人的悬架模块半剖结构示意图;
图8是本发明多场景应用机器人的桨叶模块结构示意图;
图9是本发明的基于simulink的路面激励减震仿真图;
图10是本发明的基于simulink的悬挂减震的阶跃响应仿真图;
图11是本发明多场景应用控制方法中的减震控制流程图;
图12是本发明多场景应用控制方法中的越障控制流程图;
图13是本发明多场景应用控制方法中的越障示意图;
图14是本发明多场景应用控制方法中的转向控制方法图;
图15是本发明多场景应用控制方法中的隔震平台控制流程图。
具体实施方式
如图1至图3所示,本发明多场景应用机器人包括车体模块1、隔震平台模块2、悬架模块3、桨叶模块4、连接杆5、横向弹簧阻尼6、支撑腹板7和移动轮8,其中的移动轮8采用麦克纳姆轮;隔震平台模块2固定在车体模块1上方,形成了轮式移动机器人的主体部分;支撑腹板7位于车体模块1的两侧,通过连接柱13铆接固定;横向弹簧阻尼6位于主体两侧,与支撑腹板7和悬架模块3连接,用于实现移动机器人横向与纵向组合式减震中的横向减震。悬架模块3与连接杆5及横向弹簧阻尼6连接布置在主体两侧,桨叶模块4放置在悬架模块3中间即两个悬架侧板中间。本发明的多场景应用机器人为轮式移动机器人。
如图4所示,车体模块1包括底板组件11、连接柱12和连接肋板13,其中,车体模块1的底板组件11包含一个空腔结构与底板组件11中的底板组成一个整体,底板组件11的空腔结构为移动机器人在水上环境工作提供浮力,从而实现移动机器人在水上悬浮。连接柱12置于底板组件11与腹板21之间,通过铆接与底板组件11和腹板21连接,连接助板13布置在底板组件11与腹板21之间,通过铆接与底板组件11和腹板21连接。
如图5所示,腹板21的上方放置隔震平台22,隔震平台22与滚珠丝杆螺母24相连接随滚珠丝杆螺母24的运动而运动,陀螺仪传感器26位于腹板21上方,通过与腹板21铆接固定,用于采集机器人震动幅度及倾斜程度,滚珠丝杆23固定于腹板21的上方,通过滚珠丝杆23旋转运动带动滚珠丝杆螺母24的运动,第一步进电机25通过减速器与滚珠丝杆23连接,通过控制系统将陀螺仪传感器26收集的移动机器人震动幅度及倾斜程度信息进行处理并转换为相应脉冲信号发送给第一步进电机25,从而使第一步进电机25带动滚珠丝杆23转动,滚珠丝杆螺母24将转动化为直线运动带动隔震平台22定向移动,实现主动化减震;激光雷达扫描仪27通过铆接与隔震平台22连接,位于隔震平台22上方起到检测障碍物高度的作用。
如图6、图7所示,悬架模块3包括悬架连接组件34、第一减速器37、第二电机38和传动轴39,悬架侧板32与悬架中板35分别位于悬架连接组件34的两侧,都通过焊接连接,悬架侧边板31分别置于悬架侧板32和悬架中板35两侧,悬架弹簧阻尼33置于悬架侧边板31两侧,通过悬架连接组件34与悬架侧边板31和悬架侧板32连接,用于机器人横向与纵向组合式减震中的纵向减震。传动轴39通过焊接与悬架中板35连接,悬架内板36与传动轴39连接,起到与横向弹簧阻尼6的连接作用。第二步进电机38通过第一减速器37与传动轴39相连接,电机的转矩通过传动轴39传递给悬架中板35,从而驱动悬架模块3抬起,提高了移动机器人的越障能力。悬架模块3与横向弹簧阻尼6相连接使横向减震与纵向减震得到组合从而相较于传统单个方向减震实现多方向减震,以此实现较好的减震效果,其减震效果仿真如图8,9所示,如图8所示实线为路面起伏的程度,虚线为机器人平台在以sin函数模仿的颠簸路面下的起伏曲线,在1.6秒时,路面起伏达到最大值1dm,而机器人平台的起伏程度只有0.2dm,振幅只有原来的百分之二十。在3秒,6秒等时间点处,路面的起伏曲线斜率相较于移动机器人平台起伏曲线斜率更大,更陡峭,如图9所示实线为不同程度的阶跃激励,虚线为悬挂减震的响应,在0-2s路面激励振幅为3dm,而车身振幅为2dm,在1.8秒时车身振幅峰值为0.2dm左右趋于稳定,在2-4s路面激励与上节激励振幅差为2dm,而车身振幅为1dm,车身振幅在后续的几次震荡中振幅峰值逐渐变小,持续1.7s车身姿态趋于平稳,车身姿态趋于稳定所需时间较短,由图8,9仿真结果得出,该结构减小地面的激励信息,具有很好的减震效果,满足复杂地形的适应要求。
如图7所示,桨叶模块4包括桨叶41、第三步进电机43和第二减速器42,第三步进电机43通过第二减速器42与桨叶41相连接,随着第三步进电机的转动带动桨叶41的转动从而驱动机器人在水上环境工作。
本发明多场景应用机器人的应用控制方法如下:
(1)启动机器人,根据需要选择相应的地面或水上应用场景;
(2)在地面场景下:当多场景应用机器人处于地面应用场景,若悬架侧边板31处于下降状态,则关闭第三步进电机43,使桨叶41停止运转,为四个移动轮8中的独立电机通电,并启动移动轮的电机来驱动四个移动轮8转动,实现机器人在地面上的驱动、越障,同时通过移动轮8进行变向。若悬架侧边板31处于抬起状态,则先启动悬架弹簧阻尼33进行收缩,将悬架侧边板31向下降45度后,悬架弹簧阻尼33停止收缩,使悬架侧边板31处于下降状态,再重复上述步骤。
(3)当机器人处于水上应用场景,若悬架侧边板31处于抬起状态,则停止四个移动轮8运转,开启第三步进电机43,并通过第二减速器42驱动桨叶41的转动,通过桨叶41划动水面以此驱动移动机器人的运动,同时通过两侧桨叶41的速度差实现水上的转向。若悬架侧边板31处于下降状态,则先启动悬架弹簧阻尼33进行收缩,将悬架侧边板31向上抬起45度后,关闭悬架弹簧阻尼33,使悬架侧边板31处于抬起状态,再重复上述步骤。
(4)在步骤(2)和步骤(3)的基础上,通过陀螺仪传感器26实时检测移动机器人的震动幅度和倾斜角度并传递至控制系统,控制系统转化成脉冲信号传递给步进电机25,步进电机25转动驱动滚珠丝杆23使滚珠丝杆螺母24移动,从而驱动隔震平台22定向移动,以及移动机器人的进一步减震。
如图10所示,步骤(4)中,多场景应用机器人的纵向与横向组合式减震控制方法如下:
(1)当遇到颠簸路面时,通过悬架弹簧阻尼33伸缩对机器人所受的纵向力进行缓冲,从而减少机器人纵向的颠簸;
(2)机器人所受横向力传递到横向弹簧阻尼6,横向弹簧阻尼6通过伸缩对横向力进行缓冲,从而减少机器人横向的颠簸;
(3)经过纵向与横向缓冲过后的力,通过支撑腹板7传递到车体模块1,使轮式移动机器人的纵向减震与横向减震相结合,实现机器人的多方向减震。
步骤(2)中,如图12,图13所示,多场景应用机器人的越障控制方法如下:
(1)启动机器人。
(2)当机器人遇到高障碍时,激光雷达扫描仪27扫描检测障碍物高度h,经过公式
(3)通过控制系统将角度转换为相应脉冲信号发送给第二步进电机38,第二步进电机38转动相应角度,产生转矩。
(4)转矩通过第一减速器37,由传动轴39传递给悬架中板35。
(5)转矩作用在悬架中板35上,使悬架模块3向上抬起角度θ,以此越过障碍。
步骤(2)中,如图14所示,本发明多场景应用机器人的变向控制方法如下:
(1)机器人启动上电,两侧四个移动轮均以独立电机驱动。
(2)当四个移动轮都正转时,机器人前进。
(3)当四个移动轮都反转时,机器人后退。
(4)当A轮正转B轮反转时,机器人向右。
(5)当A轮反转B轮正转时,机器人向左。
如图15所示,多场景应用机器人的隔震平台控制方法如下:
(1)启动机器人启动上电,陀螺仪传感器26开始工作。
(2)当遇到颠簸路面时,陀螺仪传感器26采集轮式移动机器人的震动幅度及倾斜程度。
(3)陀螺仪传感器26将采集信息传递给控制系统,控制系统对信息进行处理形成脉冲信号传递给第一步进电机25。
(4)第一步进电机25转动,驱动滚珠丝杆23旋转,使得滚珠丝杆螺母24定向移动。
(5)滚珠丝杆螺母24带动隔震平台22定向移动,使隔震平台模块2的重心发生改变,从而对隔震平台减震。