一种缺苗检测方法
文献发布时间:2024-01-17 01:21:27
技术领域
本发明涉及农业信息化技术领域,具体涉及一种缺苗检测方法。
背景技术
农业水稻种植生产中,插秧机的出现显著提高了水稻种植效率,但插秧机在插秧过程中,往往容易出现苗盘缺苗或者插秧机构故障等情况,导致发生取秧机构无法顺利取秧或秧苗插入泥土过浅等问题,最终导致漏插或者浮苗。缺苗情况的发生会直接影响作物产量,传统的缺苗检测方法主要是人工巡查,存在效率低下、漏检率高、耗时耗力等问题。
为了解决上述问题,现有技术采用自动化进行缺苗检测。例如,申请公布号为CN113807128A的发明专利申请公开了一种缺苗标记方法、装置、计算机设备和存储介质;该方法根据农田图像生成作物二值图,并根据所述作物二值图获取种植行主方向,提取所述作物二值图中包括的多个作物连通域;根据所述作物二值图和所述种植行主方向,获取至少一个种植行区域;根据各种植行区域内相邻作物连通域之间的距离,在所述种植行区域内进行缺苗标记。但是,上述方法还存在以下不足:
1、上述方法由于需要基于作物行及其连通区域来定位秧苗位置,因此,应用场景仅为农机行驶作业方向为直线方向,难以适用于非直线的作业方向。
2、水田作业环境相对于旱田作业环境更为复杂,作业过程中容易发生侧滑情况;在现实环境中,存在许多不规则田块,所以上述方法适用范围窄。
3、由于图像处理技术存在受环境光照影响较大,仅仅通过视觉图像处理来识别缺苗,准确率较低且不可靠。
发明内容
本发明的目的在于克服上述存在的问题,提供一种缺苗检测方法,该方法能够适用于不规则的田块,也适用于非直线作业方向的场景,适用范围广;而且该方法通过图像处理技术,结合基于插秧机相关参数构建的模型计算得到的理论秧苗地理坐标,进行综合判断是否缺苗,提高了缺苗识别准确率。
本发明的目的通过以下技术方案实现:
一种缺苗检测方法,所述方法用于检测插秧机插秧后的缺苗情况,所述方法包括以下步骤:
(1)获取插秧机的作业轨迹;
(2)构建插秧机插秧模型;
(3)计算得到理论秧苗地理坐标;
(4)通过无人机采集插秧后的秧苗图像;
(5)通过构建好的深度学习目标检测模型,识别和定位秧苗图像中的秧苗,并获取秧苗像素坐标;
(6)把秧苗像素坐标转换为实际秧苗地理坐标;
(7)结合实际秧苗地理坐标,以理论秧苗地理坐标为原点,设定指定距离为区域半径,如果区域半径内不存在实际秧苗地理坐标点,则判断该区域半径为缺苗区域;
(8)标记缺苗区域内的理论秧苗地理坐标为缺苗坐标。
本发明的一个优选方案,其中,步骤(1)中,通过在插秧机顶部安装RTK天线和在插秧机内部安装RTK接收机,记录插秧机作业过程中的作业轨迹,所述作业轨迹包括插秧机的作业位置和作业方向。
优选地,步骤(2)中,构建插秧机插秧模型需要获取插秧机以下参数:
RTK实际位置点和插秧机中各个插秧机构插秧点的空间距离、插秧机的实时行进速度、插秧机构和插秧机机体的实时位置关系以及插秧机构的位置信号。
步骤(3)中,通过插秧机的作业轨迹以及插秧机插秧模型,可以计算得到理论秧苗地理坐标。
优选地,步骤(4)中,所述无人机为带有RTK定位功能的航测无人机,该航测无人机能够记录拍摄瞬间相机的位置信息和姿态信息。
优选地,步骤(5)中,所述深度学习目标检测模型的构建方法包括以下步骤:
(5.1)采集插秧后的秧苗图像;
(5.2)图像预处理,标注秧苗图像;
(5.3)划分秧苗图像为训练集和验证集,训练得到深度学习目标检测模型。
优选地,步骤(6)中,把秧苗像素坐标转换为实际秧苗地理坐标的具体步骤包括:
(6.1)采用航测建模软件对步骤(4)中的秧苗图像进行建图,获取带有地理坐标信息的图像;
(6.2)通过步骤(5)中的秧苗像素坐标和带有地理坐标信息的图像建立对应关系,把秧苗像素坐标转换为实际秧苗地理坐标。
优选地,步骤(7)中,如果区域半径内存在实际秧苗地理坐标点,则判断该区域半径为有苗区域。
本发明与现有技术相比具有以下有益效果:
本发明中的缺苗检测方法,应用于插秧后的缺苗检测,通过采集插秧后的秧苗图像进行处理,降低了光照对识别率的影响;通过插秧机的作业轨迹和插秧机插秧模型计算得到理论秧苗地理坐标,结合实际秧苗地理坐标,以理论秧苗地理坐标为原点,进行综合判断是否缺苗,极大提高了缺苗识别准确率。
2、本发明中的缺苗检测方法,将插秧机插秧模型计算得到的理论秧苗地理坐标与深度学习目标检测模型识别和计算得到的实际秧苗地理坐标进行比对,形成对缺苗位置的综合判断,而不是仅仅依靠图像处理来判断;如果仅仅依靠图像处理来判断,图像处理受环境光照影响较大;因此,本发明中的缺苗检测方法的缺苗检测率更高,更可靠。
3、本发明中的缺苗检测方法,将插秧机插秧模型计算得到的理论秧苗地理坐标与深度学习目标检测模型识别和计算得到的实际秧苗地理坐标进行比对,形成对缺苗位置的综合判断,因此能够识别出插秧机正常作业区域的缺苗情况,适用于各种不规则的田块,也适用于非直线作业方向的场景,适用范围广;插秧后,可对各种田块进行缺苗检测。
附图说明
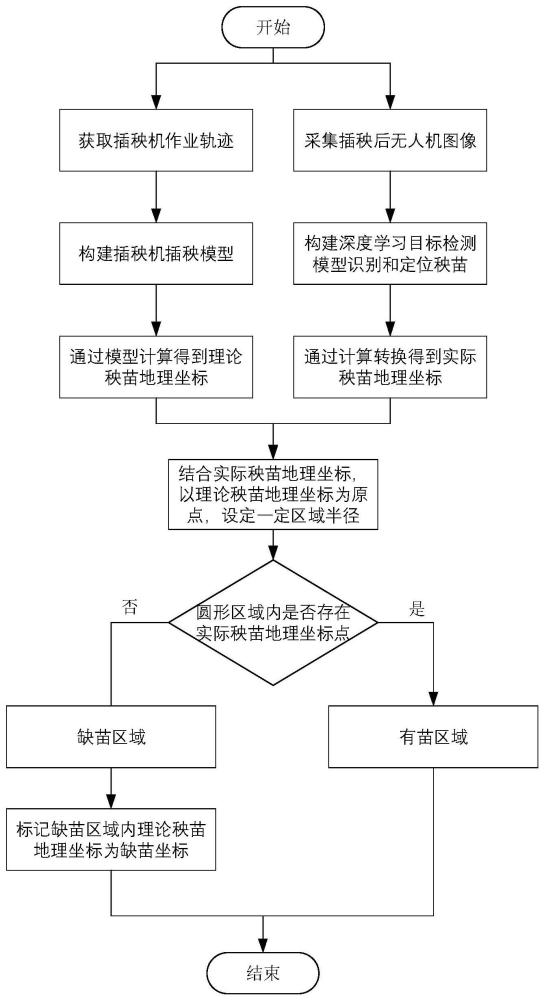
图1为本发明中的一种缺苗检测方法的流程图。
图2为无人机采集的秧苗图像。
图3为本发明中通过作业轨迹和插秧机插秧模型计算得到理论秧苗地理坐标示意图。
图4为本发明中通过深度学习目标检测模型的实际秧苗地理坐标示意图。
图5为本发明中理论秧苗地理坐标点和实际秧苗地理坐标的结合图。
图6为本发明中缺苗区域示意图,其中,图片背景为无人机拍摄的秧苗图像。
图7为本发明中缺苗坐标点的示意图,其中,图片背景为无人机拍摄的秧苗图像。
具体实施方式
为了使本领域的技术人员很好地理解本发明的技术方案,下面结合实施例和附图对本发明作进一步描述,但本发明的实施方式不仅限于此。
参见图1-图7,一种缺苗检测方法,所述方法用于检测插秧机插秧后的缺苗情况,所述方法包括以下步骤:
(1)获取插秧机的作业轨迹;
(2)构建插秧机插秧模型;
(3)计算得到理论秧苗地理坐标;
(4)通过无人机采集插秧后的秧苗图像;
(5)通过构建好的深度学习目标检测模型,识别和定位秧苗图像中的秧苗,并获取秧苗像素坐标;
(6)把秧苗像素坐标转换为实际秧苗地理坐标;
(7)结合实际秧苗地理坐标,以理论秧苗地理坐标为原点,设定指定距离为区域半径,如果区域半径内不存在实际秧苗地理坐标点,则判断该区域半径为缺苗区域;
(8)标记缺苗区域内的理论秧苗地理坐标为缺苗坐标。
本实施例中,通过将插秧机插秧模型计算得到的理论秧苗地理坐标与深度学习目标检测模型识别和计算得到的实际秧苗地理坐标进行比对,形成对缺苗位置的综合判断,进一步提升缺苗检测的准确率。
具体地,步骤(1)中,通过在插秧机顶部安装RTK天线和在插秧机内部安装RTK接收机,记录插秧机作业过程中的作业轨迹,所述作业轨迹包括插秧机的作业位置和作业方向。通过RTK进行定位,可以精准识别插秧机的作业轨迹,使得得到理论秧苗地理坐标更加准确。
具体地,步骤(2)中,构建插秧机插秧模型需要获取插秧机以下参数:
RTK实际位置点和插秧机中各个插秧机构插秧点的空间距离、插秧机的实时行进速度、插秧机构和插秧机机体的实时位置关系以及插秧机构的位置信号。上述步骤中,RTK实际位置点指的是RTK天线的位置。插秧机包括插秧机机体以及多个用于插秧的插秧机构。
参见图1-3,步骤(3)中,通过插秧机的作业轨迹以及插秧机插秧模型,可以计算得到理论秧苗地理坐标。插秧机插秧模型实际为基于上述参数的参数值得到的计算公式,通过输入参数值和程序运算,即可得到所述的理论秧苗地理坐标。
具体地,步骤(4)中,所述无人机为带有RTK定位功能的航测无人机,该航测无人机能够记录拍摄瞬间相机的位置信息和姿态信息。通过获取位置信息和姿态信息,用于把秧苗像素坐标转换为实际秧苗地理坐标;具体为,通过航测无人机记录拍摄瞬间相机的位置信息和姿态信息,使得航测建模软件在建图的过程中,可以获取带有地理坐标信息的图像,从而可以得到实际秧苗地理坐标。因此,需要相机拍摄瞬的相机位置信息和姿态信息,是必要条件,缺失该信息,无法建图。
具体地,步骤(5)中,所述深度学习目标检测模型的构建方法包括以下步骤:
(5.1)采集插秧后的秧苗图像;
(5.2)图像预处理,标注秧苗图像;
(5.3)划分秧苗图像为训练集和验证集,训练得到深度学习目标检测模型。
上述步骤中,提前通过采集秧苗图像,标注、划分训练集、验证集,然后训练得到的深度学习目标检测模型,通过得到的深度学习目标检测模型可以去检测其他获取到的秧苗图像,从而得到秧苗像素坐标。
参见图2-图4,步骤(6)中,把秧苗像素坐标转换为实际秧苗地理坐标的具体步骤包括:
(6.1)采用市面上的航测建模软件对步骤(4)中的秧苗图像进行建图,获取带有地理坐标信息的图像;
(6.2)通过步骤(5)中的秧苗像素坐标和带有地理坐标信息的图像建立对应关系,把秧苗像素坐标转换为实际秧苗地理坐标。
步骤(7)中,区域半径为圆形区域,所述原点为圆形区域的圆心。
进一步地,步骤(7)中,如果区域半径内存在实际秧苗地理坐标点,则判断该区域半径为有苗区域。
图3中,50%灰色点为理论秧苗地理坐标点,背景为无人机拍摄的秧苗图像;图4中,白色点为实际秧苗地理坐标点,背景为无人机拍摄的秧苗图像;图5中,白色点为实际秧苗地理坐标点,50%灰色点为理论秧苗地理坐标点,黑色框为缺苗区域,黑色点为缺苗坐标点,背景为无人机拍摄的秧苗图像。
上述为本发明较佳的实施方式,但本发明的实施方式并不受上述内容的限制,其他的任何未背离本发明的精神实质与原理下所做的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。