一种用于AGV设备的运行控制管理系统
文献发布时间:2024-01-17 01:26:37
技术领域
本发明属于运输设备技术领域,涉及到一种用于AGV设备的运行控制管理系统。
背景技术
AGV是Automated Guided Vehicle的缩写,意即"自动导引运输车"。AGV是装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车。AGV设备在运输过程中,由于运行路径宽度受限无法同时容纳多个设备在同一时间段沿同一路径并行或反向运行,导致多个设备在交汇路径处时无法对AGV设备进行运行时效优先程度控制设备运行的优先顺序,进而存在运输时效优先要求高的设备因等待其他设备优先通过交汇路径而造成时效优先程度要求高的设备运输效率降低,加剧了各设备运输时长的不均衡化,造成运输效率低,同时,因各设备到达交汇路径处的时间不同,无法预测出各设备与各设备存在路径交汇下到达各汇聚位置点的时间,进而无法对存在路径交汇的各设备进行智能化运行引导控制及避让控制,导致设备运行时长无法进行准确预测以及无法消除各设备运输时长间的偏差等问题。
发明内容
本发明的目的在于提供的一种用于AGV设备的运行控制管理系统,解决了现有技术中存在的问题。
本发明的目的可以通过以下技术方案实现:
一种用于AGV设备的运行控制管理系统,包括获取各引导运输设备在运输过程中的运行参数的运行参数检测模块、运输时效分析模块、融合索引分析模块、交互干扰评估模块、运行预测更新模块和运行引导管控模块;
运输时效分析模块用于对各引导运输设备沿运行路径所需搬运的货物量进行分析,并分析出各引导运输设备运输的时效优先程度;
融合索引分析模块用于对各引导运输设备的运行路径进行融合,获得融合后的运行轨迹分布图,基于运行轨迹分析图分析运行轨迹存在路径交汇处的汇聚位置点、分离位置点,对路径交汇处的汇聚位置点和分离位置点进行索引分析;
交互干扰评估模块用于提取各引导运输设备从搬运起始位置的出发时间以及路径交汇处的各引导运输设备从搬运起始位置到经各汇聚位置点、分离位置点的时长,评估各引导运输设备在运行路径中经各路径交汇处运输所存在的交互干扰影响系数;
运行预测更新模块用于预测引导运输设备经各路径交汇后的预测时间和实测时间进行预测累计误差,结合预测累计误差最小化和各路径交汇处的交互干扰影响系数更新时间预测模型并获得各引导运输设备达到下一汇聚位置点的时间以及运行时长;
运行引导管控模块用于获取各引导运输设备运输至各汇聚位置点的更新预测时间,并根据达到各汇聚位置点的预测时间以及相邻两汇聚位置点间的距离分析出引导运输设备在路径交汇处的停滞时间时长,以控制引导运输设备在路径交汇处的运行。
进一步地,各引导运输设备运输的时效优先程度通过时效优先系数ai进行确定,即
进一步地,所述引导运输设备在运行路径中的各交汇位置点的交互干扰影响系数的分析方法:
步骤1、筛选出第i个引导运输设备在第k个路径交汇处存在交汇的各引导运输设备的出发时间qi0以及到达该交汇位置点、分离位置点的时长,并记为阻碍引导运输设备;
步骤2、分析出第i个引导运输设备的汇聚时间区间
步骤3、判断运行路径存在路径交汇的两设备是否同向运行,若
步骤4、若
进一步地,所述运行预测更新模块对引导运输设备按照运行路径进行运行时长预测,预测方法,包括以下步骤:
步骤1、获得目标引导运输设备从搬运起始位置到卸货位置的运行过程中与目标引导运输设备的路径相交汇的各引导运输设备的搬运上货时长yi1、卸货时长yi2;
步骤2、基于存在路径交互的各引导运输设备到达汇聚位置点以及与汇聚位置点所对应的分离位置点,分析出各汇聚位置点至与该汇聚位置点相对应的分离位置点的过程中受路径交汇处引导运输设备的运行干扰停留时长;
步骤3、预测目标引导运输设备沿运行路径行驶到各汇聚位置点的时间预测模型
步骤4、统计各引导运输设备实际达到各汇聚位置点的时间实测模型
步骤5、计算各引导运输设备从搬运起始位置到卸货位置的运行过程中时间预测累计误差
步骤6、获得引导运输设备经时间预测模型更新后的运行时长
进一步地,所述步骤3中各汇聚位置点的时间预测模型
进一步地,所述步骤5中更新后的时间预测模型
进一步地,本系统还包括动态运行调整模块,动态运行调整模块用于获取引导运输设备达到下一汇聚位置点的实际时间以及预测时间,分析出各路径交汇处所对应的停滞阻碍时长,基于停滞阻碍时长对更新后的时间预测模型下的预测时间进行动态调整。
进一步地,本系统还包括预测偏移调整模块,预测偏移调整模块用于获得各引导运输设备运行过程中经时间预测模型更新后的预测运输时长,判断各引导运输设备的预测运输时长累计偏差系数是否大于设定阈值,若大于设定的阈值,则重新调整各引导运输设备的运输时效优先级,直至预测运输时长累计偏差小于等于设定阈值;
所述预测运输时长累计偏差系数
本发明的有益效果:
本发明提供的用于AGV设备的运行控制管理系统,对各AGV设备的运输时长进行分析,以确定各设备的运输过程中的时效优先程度,便于根据时效优先程度对交汇路径进行优先运输,以平衡各设备的运输时长间的差异化。
本发明通过融合索引分析模块对各设备的运行路径进行融合处理,筛选出运行轨迹存在各路径交汇处的汇聚位置点和分离位置点的时长,基于各设备的时效优先程度以及到达路径交汇处的时长进行交互干扰影响程度分析,准确获得各引导运输设备运行过程中各路径交汇处受其他设备运行的干扰程度,为后期预测引导运输设备经各路径交汇后的预测时间提供数据基础。
本发明通过采用预测时间模型和时间实测模型进行联合分析,以确定预测和实测间的偏移误差,在保证偏移误差最小条件下,对预测时间模型进行更新,提高引导运输设备到达各汇聚位置点的时间的准确性,进而预测出引导运输设备按照运行路径下受其他各引导运输设备的交互干扰影响后所准确预测的引导运输设备运行时长,以控制设备在路径交汇处的运行,实现设备在运行路径上的最佳运行引导控制,能够衡量时效优先系数和运输货物量下对各引导运输设备进行交互运行控制,缩短各引导运输设备间的运输时效间的差异性,便于为引导运输设备提供最大的运行引导规划。
本发明通过分析设备运输路径中的停滞阻碍时长,对更新后的时间预测模型下的预测时间进行动态调整,以实现对运输过程中的干扰进行补偿,提高了后续各汇聚位置点预测时间的准确性,能够有效地保证在运输过程中因其他因素干扰而进行运行避让调控;同时能够消除各引导运输设备运输时效间的偏差,实现引导运输设备运行控制的智能化、均衡化和合理性,大大缩短货物运输的综合时长,提高货物运输效率。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
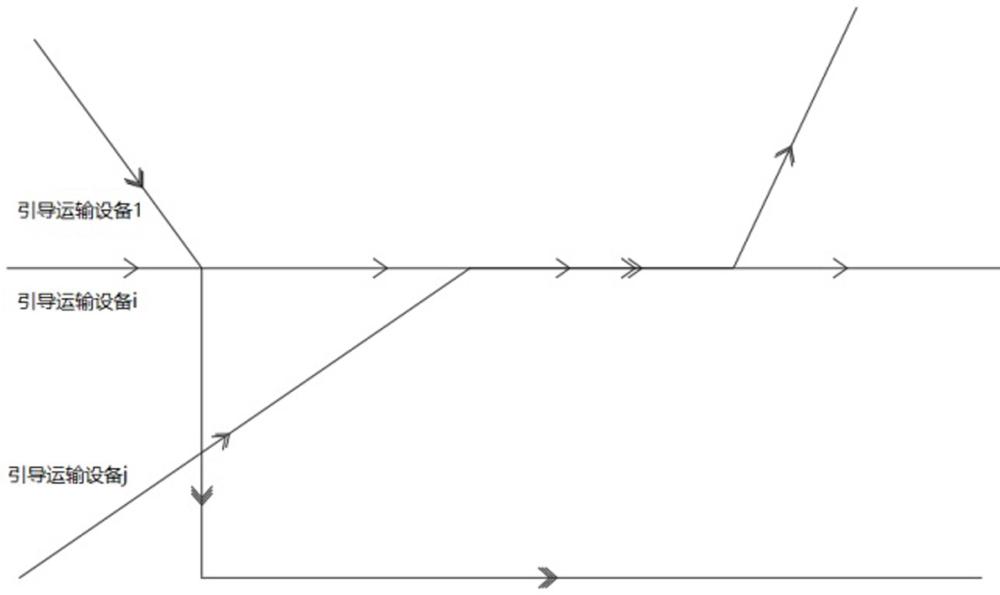
图1为本发明中各AGV设备运行轨迹分布图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
设备在运输过程中,由于运行路径宽度受限无法同时容纳多个设备在同一时间沿同一路径并行或反向运行,因此当需要运输货物量多且时间紧急的情况下,需采用多个AGV设备进行联合运输,在多个设备联合运输过程中因路径受限无法智能化引导设备进行运行,导致各设备运输时长差异化过大,导致运输效率受限。
一种用于AGV设备的运行控制管理系统,包括运行参数检测模块、运输时效分析模块、融合索引分析模块、交互干扰评估模块、运行预测更新模块和运行引导管控模块。
运行参数检测模块用于获取各引导运输设备(AGV)在运输过程中的运行参数,运行参数包括初始搬运时间点、运行速度、单程运输时长、运行路径等。
运输时效分析模块用于获取各引导运输设备沿运行路径所需搬运的货物量Di,根据货物量统计出货物搬运所需的运输时长,并分析出各引导运输设备运输的时效优先程度。
运输时长:Fi=Di/di*(2fie+fi0+fi1)-fie,fi0和fi1分别表示为第i个设备搬运上货时长和卸货时长,di为第i个设备单次运输的货物量,fie为第i个设备单程运行路径上的时长,Fi表示为第i个设备运输完成所需的总时长。
各引导运输设备运输的时效优先程度通过时效优先系数ai进行确定,即
融合索引分析模块用于对各引导运输设备的运行路径进行融合,获得融合后的运行轨迹分布图,如图1所示,基于运行轨迹分析图分析运行轨迹存在路径交汇处的汇聚位置点、分离位置点,对路径交汇处的汇聚位置点和分离位置点进行索引分析,分析出各引导运输设备达到汇聚位置点的时序集合Xi和分离位置点的时序集合Yi, xi={ti1,ti2,…,tik,…,tin},yi={ri1,ri2,…,rik,…,rin}, tik表示为第i个设备从搬运起始位置出发到达运行轨迹上第k个汇聚位置点的时长,rik表示为第i个设备在运行轨迹上经第k个汇聚位置点后所对应的分离位置点的时长。
交互干扰评估模块用于获取各引导运输设备从搬运起始位置的出发时间
以第i个引导运输设备在运行路径中经各路径交汇处运输所存在的交互干扰影响系数为例,进行交互干扰分析,具体:
引导运输设备在运行路径的各交汇位置点的交互干扰影响系数的分析方法:
步骤1、筛选出第i个引导运输设备在第k个路径交汇处存在交汇的各引导运输设备的出发时间qi0以及到达该交汇位置点、分离位置点的时长,并记为阻碍引导运输设备;
步骤2、分析出第i个引导运输设备的汇聚时间区间
步骤3、判断运行路径存在路径交汇的两设备是否同向运行,若
步骤4、若
根据存在路径交汇的各引导运输设备经融合后运行轨迹分布图中各汇聚位置点以及与汇聚位置点相对应的分离位置点的时间,并结合存在路径交汇处的各引导运输设备的时效优先系数,判定存在路径交汇处的各引导运输设备在运输中的交互干扰影响系数,能够对运行轨迹分布图中的交汇路径进行有效地模拟评估,准确获得各引导运输设备运行过程中各路径交汇处受其他设备运行的干扰程度。
运行预测更新模块用于提取各引导运输设备按照运行路径在各路径交汇处运输所存在的交互干扰影响系数,预测引导运输设备经各路径交汇后的预测时间和实测时间进行预测累计误差,结合预测累计误差最小化和各路径交汇处的交互干扰影响系数更新时间预测模型,以准确获得引导运输设备达到下一汇聚位置点的时间以及运行时长,实现了在其他引导运输设备的运输干扰下能够准确预测出引导运输设备到各汇聚位置点的时间,为后期车辆运输引导提供可靠的数据。
其中,运行预测更新模块对引导运输设备按照运行路径进行运行时长预测,预测方法,包括以下步骤:
步骤1、获得目标引导运输设备从搬运起始位置到卸货位置的运行过程中与目标引导运输设备的路径相交汇的各引导运输设备的搬运上货时长yi1、卸货时长yi2;
步骤2、基于存在路径交互的各引导运输设备到达汇聚位置点以及与汇聚位置点所对应的分离位置点,分析出各汇聚位置点至与该汇聚位置点相对应的分离位置点的过程中受路径交汇处引导运输设备的运行干扰停留时长;
步骤3、预测目标引导运输设备沿运行路径行驶到各汇聚位置点的时间预测模型
步骤4、统计各引导运输设备实际达到各汇聚位置点的时间实测模型
步骤5、计算各引导运输设备从搬运起始位置到卸货位置的运行过程中时间预测累计误差
步骤6、获得引导运输设备经时间预测模型更新后的运行时长
通过采用预测时间模型和时间实测模型进行联合分析,以确定预测和实测间的偏移误差,在保证偏移误差最小条件下,获得更新后的预测时间模型,能够提高引导运输设备到达各汇聚位置点的时间的准确性,进而预测出引导运输设备按照运行路径下受其他各引导运输设备的交互干扰影响后所准确预测的引导运输设备运行时长,提高了预测的准确性。
运行引导管控模块用于获取各引导运输设备运输至各汇聚位置点的更新预测时间,并根据达到各汇聚位置点的预测时间以及相邻两汇聚位置点间的距离分析出引导运输设备在路径交汇处的停滞时间时长,以控制引导运输设备在路径交汇处的运行,实现引导运输设备在运行路径上的最佳运行引导控制,能够衡量时效优先系数和运输货物量下对各引导运输设备进行交互运行控制,缩短各引导运输设备间的运输时效间的差异性,便于为引导运输设备提供最大的运行引导规划。
实施例二
根据引导运输设备达到各汇聚位置点的预测时间进行运行,在运输过程中由于引导运输设备受其他因素干扰,会造成引导运输设备到达各汇聚位置点的预测时间与实际时间存在偏差,为了解决此问题,本系统还包括动态运行调整模块,动态运行调整模块用于获取引导运输设备达到下一汇聚位置点的实际时间以及预测时间,分析出各路径交汇处所对应的停滞阻碍时长(停滞阻碍时长=达到第k个汇聚位置点的实际时间-达到第k个汇聚位置点的预测时间),基于停滞阻碍时长对更新后的时间预测模型下的预测时间进行动态调整,以实现对运输过程中的干扰进行补偿,提高了后续各汇聚位置点预测时间的准确性,便于精准控制设备的运行情况,能够有效地保证在运输过程中因其他因素干扰而进行运行避让调控。
实施例三
本实施例一记载了各引导运输设备运行过程中经时间预测模型更新后的预测运输时长,本系统还包括预测偏移调整模块,预测偏移调整模块用于获得各引导运输设备运行过程中经时间预测模型更新后的预测运输时长,判断各引导运输设备的预测运输时长累计偏差系数是否大于设定阈值,若大于设定的阈值,则重新调整各引导运输设备的运输时效优先级,直至预测运输时长累计偏差小于等于设定阈值,能够消除各引导运输设备运输时效间的偏差,实现引导运输设备运行控制的智能化、均衡化和合理性,大大缩短货物运输的综合时长,提高货物运输效率。
其中,预测运输时长累计偏差系数
以上内容仅仅是对本发明的构思所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明的构思或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
- 一种用于AGV设备的圆桶推板装置
- 一种用于AGV车的滚筒机构及AGV车
- 应用于轨道车运行控制设备的机车信号控制装置及其控制方法
- 一种基于运行状态分析的AGV小车智能化运行调控系统
- 一种AGV安全控制系统和AGV
- 一种AGV的运行控制方法、电子设备及介质
- 一种用于激光导引AGV的运行姿态调度控制方法