用于区域测绘的装置和方法
文献发布时间:2024-04-18 19:48:15
技术领域
本发明涉及一种根据权利要求1所述类型的用于区域测绘的装置以及一种根据权利要求14所述类型的区域测绘方法,例如形式为一种借助包括多个摄像机的装置快速创建高分辨率的、地理参考的区域图像的方法。
背景技术
长期以来,区域测绘方法一直是最先进的技术。如今,除了经典的GNSS支持的测量方法外,例如还将卫星或航空摄影测量用于根据较大面积的多个重叠的图像采集生成正射镶嵌图像,即失真校正的概览图像。已知的用于区域测绘的航空摄影测量方法的缺点在于,通常从高空(例如从飞机)实施这种航空摄影测量方法,这对图像地面分辨率具有不利影响,或者,如果以高分辨率从低空(例如从无人机)来采集图像,则这些图像具有较小的图像尺寸,由此必须生成大量的图像,从而产生非常多的数据。具有足够的分辨率以及相应的图像尺寸的摄像机和传感器往往无法达到必要的解析速度以有效地实现连续的图像或传感器测量。
近年来,用于杂草监测的区域测绘特别是在农业领域已显示出其潜力。Fernández-Quintanilla等人(European Weed Research Society 2018第58卷第259页;DOI:10.1111/wre.12307)对相应的应用实例进行了概述。此外,Mink等人(Agriculture 2018第8卷第65页;DOI:10.3390/agriculture8050065)描述过一种用于通过无人机摄影测量对杂草进行测绘的装置以及一种通过无人机摄影测量对杂草进行测绘的方法。这种先前已知的现有技术的缺点在于大量待处理的数据。
使用多个摄像机的装置是摄影测量学中已知的。Wenzel等人(InternationalArchives of Photogrammetry,Remote Sensing and Spatial Information Sciences第XXXIX-B5卷2012年;DOI:10.5194/isprsarchives-XXXIX-B5-133-2012)描述过一种用于生成三维模型的多摄像机系统,其中此系统具有用于采集大型图像的主摄像机和用于局部摄影的辅助摄像机。此系统的缺点在于,其是针对小比例且高度详细的图像而设计的。
专利说明书EP 2 277 130 B1揭示过一种用于对较大区域进行遥感的从一个或多个移动平台采集图像的方法,其中采集概览图像和细节图像,从而通过光束法平差在使用概览图像和细节图像中的识别像素的情况下,根据细节图像的摄影测量计算生成详细的正射镶嵌图像。此方法的缺点在于,使用概览图像和细节图像中的识别像素来进行内部和外部定向,这需要较大的计算量。
发明内容
因此,本发明的目的是提供一种用于区域测绘的装置以及一种区域测绘方法,通过所述装置和所述方法来克服现有技术的缺点。
本发明及其优点
与此相对,根据本发明的具有权利要求1特征的用于区域测绘的装置以及根据本发明的具有权利要求14特征的区域测绘方法的优点在于,所述用于区域测绘的装置包括框架,主摄像机和/或主传感器以及至少两个辅助摄像机和/或辅助传感器固定至所述框架,其中所述主摄像机和/或主传感器以及所述至少两个辅助摄像机和/或辅助传感器在地面上具有定义的摄像机覆盖区并且具有定义的图像地面分辨率,其中所述辅助摄像机和/或辅助传感器在地面上的摄像机覆盖区小于所述主摄像机和/或主传感器在地面上的摄像机覆盖区并且至少部分位于其中,所述辅助摄像机和/或辅助传感器的图像地面分辨率高于所述主摄像机和/或主传感器的图像地面分辨率,所述辅助摄像机和/或辅助传感器定向为,使得通过所述辅助摄像机和/或辅助传感器产生的图像至少部分重叠,并且所述用于区域测绘的装置具有至少一个GNSS接收器(全球导航卫星系统)和触发机构,其中所述GNSS接收器、所述主摄像机和/或主传感器以及所述至少两个辅助摄像机和/或辅助传感器耦合至所述触发机构,从而可以更快地创建高分辨率的、地理参考的区域图像并且与现有技术相比,可以实现更高的区域效率。至少一个辅助摄像机可以是通用的工业摄像机。所述主摄像机和/或主传感器和/或所述至少一个辅助摄像机和/或至少一个辅助传感器也可以可动地固定至所述框架。因此,还可以进行枢转和/或旋转运动,使得至少一个摄像机和/或至少一个传感器单独或与至少另一摄像机和/或另一传感器一起移动。最后,也可以借助遥控手动和/或自动地同时和/或时间上错开地进行上述运动。
根据本发明的用于区域测绘的装置的一种有利的技术方案,所述辅助摄像机和/或辅助传感器定向为,使得通过辅助摄像机和/或辅助传感器产生的图像在至少一个边缘处与通过另一辅助摄像机和/或另一辅助传感器产生的图像重叠并且在其不与另一辅助摄像机和/或另一辅助传感器所产生的图像重叠的边缘处与通过另一辅助摄像机和/或另一辅助传感器采集的图像邻接或者与所述主摄像机和/或主传感器的边缘邻接。
根据本发明的用于区域测绘的装置的另一有利的技术方案,所述辅助摄像机和/或辅助传感器定向为,使得所产生的图像的重叠部较小。
根据本发明的用于区域测绘的装置的另一有利的技术方案,所述辅助摄像机和/或辅助传感器定向为,使得所产生的图像的重叠部小于10%和/或大于1%,优选地大于5%。
根据本发明的用于区域测绘的装置的另一有利的技术方案,所述主摄像机和/或主传感器在地面上的摄像机覆盖区大于所述辅助摄像机和/或辅助传感器在地面上的摄像机覆盖区的总和的5%。此外,所述主摄像机和/或主传感器在地面上的摄像机覆盖区可以大于所述辅助摄像机和/或辅助传感器在地面上的摄像机覆盖区的总和的10%,优选地大于50%,特别是优选地大于70%。
根据本发明的用于区域测绘的装置的另一有利的技术方案,根据本发明的用于区域测绘的装置具有至少一个IMU传感器。
根据本发明的用于区域测绘的装置的另一有利的技术方案,所述触发机构同时或以定义的时间偏移触发所述主摄像机和/或主传感器以及所述至少两个辅助摄像机和/或辅助传感器。
根据本发明的用于区域测绘的装置的另一有利的技术方案,所述触发机构同时或以定义的时间偏移通过至少一个GNSS接收器确定所述装置的精确位置和/或通过至少一个IMU传感器确定所述装置的旋转数据并将其记录下来。
根据本发明的用于区域测绘的装置的另一有利的技术方案,所述GNSS接收器为GPS、GLONASS、GALILEO和/或BEIDOU接收器。也可以通过标准GNSS信号和天线或者通过实时动态或差分GNSS或类似的方法来检测位置数据。
根据本发明的用于区域测绘的装置的另一有利的技术方案,根据本发明的用于区域测绘的装置具有至少一个用于固定至载人或无人驾驶飞行物(如飞机、直升机或无人机)和/或导引装置(如轨道)的固定构件。此外,所述装置的总重量也可以小于5kg,从而可以通过无人驾驶飞行物(如无人机)进行运输。固定构件也可以是可动的,因此,采集装置可以沿任意方向枢转和/或旋转。此外,可以通过遥控手动和/或自动控制此枢转和/或旋转。
根据本发明的用于区域测绘的装置的另一有利的技术方案,根据本发明的用于区域测绘的装置具有至少一个可动的连接元件,其中所述可动的连接元件将所述框架与至少一个用于固定至载人或无人驾驶飞行物(如飞机、直升机或无人机)和/或导引装置(如轨道、钢丝绳葫芦等)的固定构件连接在一起。所述可动的连接元件可以是铰链,其固定至通过固定构件安装在例如无人机的万向节上的框架。此外,压电致动器和/或马达固定在框架上,框架移动铰链,进而倾斜所述装置以及所述摄像机和/或传感器。此外,就此而言,该运动可以手动和/或自动地被控制和/或被遥控。
根据本发明的用于区域测绘的装置的另一有利的技术方案,根据本发明的用于区域测绘的装置具有第二主摄像机和/或第二主传感器。所述第二主摄像机和/或第二主传感器也可以定向为,使得其所采集的图像区域至少部分地与所述第一主摄像机和/或第一主传感器所采集的图像区域重叠或与其邻接并且具有不同的视角。此外,图像区域的重叠部至少为50%。在采用多个主摄像机和/或主传感器的情况下,这些摄像机和/或主传感器也可以分别具有不同的视角和重叠区域。
根据本发明的用于区域测绘的装置的另一有利的技术方案,根据本发明的用于区域测绘的装置具有至少一个存储模块、至少一个发射装置和/或至少一个数据处理模块。所述至少一个发射装置可以是蓝牙发射器、无线电发射器和/或数据电缆。此外,所述数据处理模块可以是单板计算机(SBC)或用于边缘计算的类似的小型计算单元,从而可以例如直接在无人机上对所采集的图像进行处理并且可以由采集单元例如以施用图或植被图的形式来创建已预处理的数据乃至数据产品,例如正射镶嵌图像或经分析的数据。
根据本发明的区域测绘方法的一种有利的技术方案,通过采集装置的触发机构,同时或以定义的时间偏移触发主摄像机和/或主传感器以及至少两个辅助摄像机和/或辅助传感器,其中所述主摄像机和/或主传感器以及所述至少两个辅助摄像机和/或辅助传感器在地面上具有定义的摄像机覆盖区并且具有定义的图像地面分辨率,其中所述辅助摄像机和/或辅助传感器在地面上的摄像机覆盖区小于所述主摄像机和/或主传感器在地面上的摄像机覆盖区并且至少部分位于其中,所述辅助摄像机和/或辅助传感器的图像地面分辨率高于所述主摄像机和/或主传感器的图像地面分辨率,并且所述辅助摄像机和/或辅助传感器定向为,使得通过所述辅助摄像机和/或辅助传感器产生的图像至少部分重叠,以便可以根据所述辅助摄像机和/或辅助传感器的图像组合成所述主摄像机和/或主传感器的图像并且同时可以精确地确定所述采集装置的位置数据和旋转数据,通过所测得的所述采集装置的位置数据和旋转数据至少部分地对所采集的图像进行地理参考并且连续多次触发所述触发机构,进而由至少一个摄像机连续进行多次采集。
根据本发明的区域测绘方法的另一有利的技术方案,沿运动方向移动所述采集装置。
根据本发明的区域测绘方法的一种与此相关的有利技术方案,多次触发所述触发机构,使得所述主摄像机和/或主传感器的所采集的图像在所述运动方向上发生重叠。
根据本发明的区域测绘方法的一种与此相关的有利技术方案,所述主摄像机和/或主传感器的所采集的图像沿运动方向的重叠部小于80%和/或大于30%。
根据本发明的区域测绘方法的另一有利的技术方案,如果先前已借助主摄像机和/或主传感器侧向偏移地采集了图像,则所述主摄像机和/或主传感器的随后所采集的图像至少部分地与其发生重叠。
根据本发明的区域测绘方法的一种与此相关的有利技术方案,所述主摄像机和/或主传感器的随后所采集的图像与所述主摄像机和/或主传感器的侧向偏移地所采集的图像的重叠部大于20%。所述重叠部也可以大于50%,优选地大于60%。
根据本发明的区域测绘方法的另一有利的技术方案,在沿运动方向运动期间,相对于所述运动方向对所述采集装置进行倾斜、旋转和/或枢转。可以对该倾斜、旋转或枢转运动进行手动和/或自动控制和/或进行遥控。
根据本发明的区域测绘方法的另一有利的技术方案,通过所测得的所述采集装置的位置数据和旋转数据对所采集的图像进行地理参考。
根据本发明的区域测绘方法的另一有利的技术方案,通过摄影测量计算根据所述主摄像机和/或主传感器的所采集的图像生成正射镶嵌图像。
根据本发明的区域测绘方法的一种与此相关的有利技术方案,借助位置数据对所述正射镶嵌图像进行地理参考。可以通过从运动恢复结构技术(SfM技术)对正射镶嵌图像进行地理参考。可以对GNSS误差进行校正。此外,可以通过在摄影测量分析中进行的光束法平差提高所测得的单像的GNSS位置的精度。
根据本发明的区域测绘方法的另一有利的技术方案,基于对所述辅助摄像机和/或辅助传感器相对于所述主摄像机和/或主传感器的定向的校准以及所述主摄像机和/或主传感器的地理参考图像和/或所述主摄像机和/或主传感器的地理参考正射镶嵌图像对所述辅助摄像机和/或辅助传感器的所采集的图像进行地理参考。
根据本发明的区域测绘方法的一种与此相关的有利技术方案,通过在所述主摄像机和/或主传感器的摄像机覆盖区中测量经定向的辅助摄像机和/或辅助传感器的摄像机覆盖区来进行校准。
根据本发明的区域测绘方法的另一有利的技术方案,通过摄影测量计算,根据所述辅助摄像机和/或辅助传感器的所采集的图像生成所述经分析的数据的正射镶嵌图像或地理参考地图。
根据本发明的区域测绘方法的一种与此相关的有利技术方案,通过与由所述主摄像机和/或主传感器生成的地理参考的正射镶嵌图像进行对比来对由所述辅助摄像机和/或辅助传感器生成的正射镶嵌图像进行地理参考。
根据本发明的区域测绘方法的另一有利的技术方案,所述位置数据来源于GNSS接收器和/或控制点。
根据本发明的区域测绘方法的另一有利的技术方案,由载人或无人驾驶飞行物(如飞机、直升机和/或无人机)或者沿导引装置(如轨道、钢丝绳葫芦等)移动所述采集装置。也可以由载人或无人驾驶飞行物(如飞机、直升机和/或无人机)或者沿导引装置(如轨道、钢丝绳葫芦等)来同时移动至少两个采集装置。此外,无人机可以是水翼无人机。
根据本发明的区域测绘方法的另一有利的技术方案,所述位置数据来源于安装在采集装置和/或飞机、直升机、无人机或导引装置上的GNSS接收器。
根据本发明的区域测绘方法的另一有利的技术方案,在采集后,将所生成的数据和/或图像保存在至少一个存储模块上和/或通过至少一个发射装置将其传输至至少一个外部数据存储器。
根据本发明的区域测绘方法的另一有利的技术方案,通过经训练的人工智能(KI)对地理参考的正射镶嵌图像或单像进行分析。可以将根据本发明的方法用于农业和/或林业的取样、测量和/或监测,特别是用于观察病虫害、杂草侵扰、植物健康,用于对植物进行计数,用于检测植被密度和兽害和/或用于进行监测。此外,还可以在地理参考的正射镶嵌图像中对杂草进行识别和测绘,随后据此创建针对田间喷雾机的除草剂施用图。此外,也可以将根据本发明的方法用于测量、检查和/或评估工业厂房、露天矿、建筑工地、铁路和/或电力线,或者也可以用于监测天然气管道。
根据本发明的区域测绘方法的另一有利的技术方案,将根据权利要求1至13中任一项所述的装置用作采集装置。
本发明的其他优点和有利的技术方案参阅以下说明、权利要求书和附图。
附图说明
根据本发明的主题的优选实施例在附图中示出,下面将对此进行详细说明。其中:
图1为根据本发明的用于区域测绘的装置,
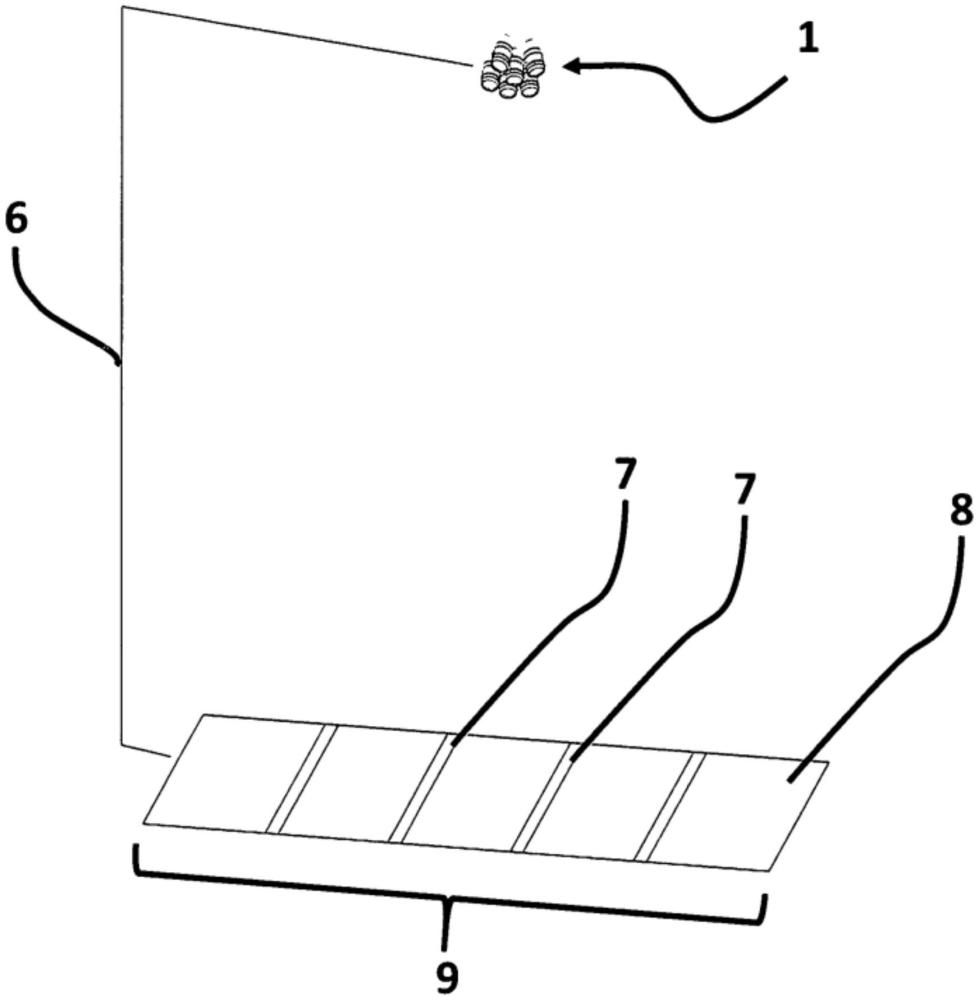
图2为在借助图1所示根据本发明的装置实施根据本发明的方法的情况下在定义的离地距离下所使用的辅助摄像机在地面上的摄像机覆盖区与主摄像机的摄像机覆盖区的重叠部的侧视图,以及
图3为在借助图1所示根据本发明的装置实施根据本发明的方法的情况下所使用的地面上的摄像机覆盖区与主摄像机的摄像机覆盖区的重叠部的俯视图。
具体实施方式
图1示出根据本发明的用于区域测绘的装置1,其具有主摄像机2和辅助摄像机3,其中可以看到主摄像机2的视向4和辅助摄像机3的视向5。主摄像机2和辅助摄像机3固定至未示出的框架。可以借助至少一个连接构件将根据本发明的装置1固定至无人机并由无人机来移动该装置。
图2为在借助图1所示根据本发明的装置实施根据本发明的方法的情况下在定义的离地距离6下所使用的辅助摄像机3在地面上的摄像机覆盖区8与主摄像机2的摄像机覆盖区9的重叠部7的侧视图,其中在所示实施例中,主摄像机2的摄像机覆盖区9示出为,使得辅助摄像机3在地面上的摄像机覆盖区8的总和与其一致。辅助摄像机3在地面上的摄像机覆盖区8的总和优选地仅与主摄像机的摄像机覆盖区部分一致。主摄像机2和辅助摄像机3固定至未示出的框架上。
在在此所示出的实施方式中,装置1的优选运动方向正交于所示出的主摄像机2的摄像机覆盖区9的长边。在此情况下,图2中所示出的辅助摄像机3的摄像机覆盖区8的侧向重叠部7完全侧向填充主摄像机2的摄像机覆盖区9。
如果根据本发明的装置1例如沿优选的运动方向移动并且连续多次触发解析机制,则会产生再现主摄像机2的摄像机覆盖区9的图像,其中这些图像的偏移以及这些图像沿运动方向的重叠与装置1的移动速度相关。如果与主摄像机2的触发并行地确定装置1的位置和旋转,则可以通过摄影测量计算,根据主摄像机2的多个所采集的图像的概览以及各个图像的位置数据创建地理参考的正交镶嵌图像,但在相应的离地距离6下,正交镶嵌图像并不具有较高的图像地面分辨率。如果在此情况下,辅助摄像机3与主摄像机2同时触发或时间上错开地触发并且借助地面上的明显较小的摄像机覆盖区8采集高分辨率的图像,则在辅助摄像机3的摄像机覆盖区8先前在主摄像机2的摄像机覆盖区9中已被测得的情况下,也可以结合借助主摄像机2生成的辅助摄像机3的地理参考的正射镶嵌图像对这些高分辨率的图像进行地理参考。为了对较大区域进行测绘,无人机例如可以携带装置1以预先编程的路径在该区域上空飞行,以便对该区域进行扫描。通过在根据本发明的方法中使用根据本发明的装置1,可以在与采用当前现有技术相比大幅缩短的时间内对较大区域进行高分辨率的成像和地理参考。通过使用多个在地面上具有较小的摄像机覆盖区8、但图像地面分辨率较高的辅助摄像机3,可以将地理参考的正射镶嵌图像的整体分辨率提高至各个辅助摄像机3的最大分辨率并且不再需要在图像地面分辨率与区域效率或持续时间之间进行折衷,从而整体大幅缩短用于创建高分辨率的、地理参考的区域图像的时间。例如可以通过同时使用多个平行布置的装置1来进一步提高区域效率。在农业用地的高分辨率的、地理参考的区域图像中,例如可以通过算法对杂草进行识别和测绘,以便随后创建除草剂施用图。为了校正飞行速度或者避免在采集期间出现非常模糊的图像,在根据本发明的方法的一种变型方案中,例如可以针对运动补偿而倾斜采集装置,使得主摄像机2的视向4和辅助摄像机3的视向5发生变化,使得主摄像机2在地面上的摄像机覆盖区9以及辅助摄像机3的摄像机覆盖区8不会发生变化。此外,也可以通过数字方法来进行运动校正,例如采用时间延迟积分(TDI)法或前向运动补偿(FMC)法。
图3示出在借助图1所示根据本发明的装置实施根据本发明的方法的情况下所使用的辅助摄像机3在地面上的摄像机覆盖区8与主摄像机2的摄像机覆盖区9的重叠部7的俯视图。
在此所示出的所有特征(单独或作为特征组合)均为发明本质所在。
附图标记表
1装置
2主摄像机
3辅助摄像机
4视向(主摄像机)
5视向(辅助摄像机)
6离地距离
7重叠部
8摄像机覆盖区(辅助摄像机)
9摄像机覆盖区(主摄像机)