一种用于ADAS实验和自动驾驶测试的载人车辆实验平台
文献发布时间:2023-06-19 09:23:00
技术领域
本发明涉及一种用于教学和科研的实验平台,具体来说是一种用于ADAS实验和自动驾驶测试的载人车辆实验平台。
背景技术
无人汽车是未来汽车行业的主要发展方向,自动驾驶技术的更新迭代也随之成为当前各个高校和企业研究的热点。
目前,在全球得到广泛认可的国际自动机工程师学会(SAE)按照车辆的自动化程度把自动驾驶级别分为L0~L5六个等级。L0为无自动化的完全驾驶员形式,L5则是在所有道路和环境条件下的完全自动驾驶。具有自适应巡航(ACC)、自动紧急制动(AEB)、车道保持系统(LKA)、和自动泊车功能的先进驾驶辅助系统(ADAS)属于部分自动化的L2~L3级别的自动驾驶。
随着ADAS技术的成熟,在高等院校和汽车类技术学校开设的相关自动驾驶课程越来越多,开展相关的教学和实验需求越来越大。而当前对介绍验证ADAS原理和自动驾驶课程的开发实验教具开发十分稀缺,大多数相关课程基于理论教学,部分开展的实验也是在仿真环境下或者采用模型车,通过实车能够直观开展实训的实验教学车极少。另一方面,自动驾驶总体是朝向L5级别这样的终极目标发展的大趋势,利用成本低廉的实车开展现实复杂交通场景的实验测试也需要自动驾驶车辆实验平台。现有的自动驾驶实验车辆存在以下问题:一是硬件成本过高,高性能传感器和工控机的成本使得很多科研团队对实验车可望而不可求。二是实车改造难度大,自动驾驶需要开放的底盘CAN通信协议,以及对车辆需要从硬件到软件、从通信到计算、从感知到控制决策的系统性改造,系统复杂,改造难度大。三是技术门槛高,一个自动驾驶汽车需要储备机械、车辆、计算机、通信、控制等多学科融合的知识和技术,一个专注于某一专业理论研究的团队难以对整个系统进行改造。因此,很多科研团队迫切需要一个能够验证自己研究成果的一体化自动驾驶测试的车辆实验平台。
发明内容
针对上述问题,本发明提出一种供能够开展ADAS实验实训和自动驾驶等相关领域技术开发与测试的一种多功能、多平台、多语言、多传感器的ADAS实验和自动驾驶测试的载人车辆实验平台。
本发明用于ADAS实验和自动驾驶测试的载人车辆实验平台,包括线控底盘、GNSS天线、激光雷达模块、毫米波雷达模块、超声波雷达模块、相机模块、显示器、无线路由器、CAN总线与工控机。
其中,GNSS天线用于进行差分定位。IMU模块用于对GNSS天线的定位数据进行数据融合。激光雷达模块用于采集激光点云数据。毫米波雷达模块用于障碍物间距离,并获取相对速度和两个对象的角度关系。超声波雷达模块用于发射超声波信号获取与前方障碍物之间距离。相机模块用于数字图像采集。显示器用于提供可视化操作界面。无线路由器为工控机提供可移动网络数据。CAN总线用于进行数据实时传输。工控机用于接收来自IMU模块的定位数据、激光雷达模块的激光点云数据、相机模块的图像数据、毫米波雷达的前方障碍物距离数据、超声波雷达模块采集超声波反射的距离数据、无线路由器的网络数据、车辆反馈的转向数据和加减速数据以及计算并输出指令。
本发明用于ADAS实验和自动驾驶测试的载人车辆实验平台,还具有用于向工控机输入实验数据或者控制指令的无线键盘,以及拥有控制的最高权限的遥控器,在紧急情况下实现对线控底盘的一键接管;遥控器数据直接通过无线信号与车辆数据CAN总线上的信号接收器通信,通过遥控器控制车辆的油门系统和制动系统进行加减速和刹车,控制转向控制系统操控线控底盘转向。
同时,线性底盘前部和后部端面安装有防碰撞保险杠,内有压力传感器,在车辆发生碰撞之后通过CAN总线传输信号给线性底盘,线性底盘会紧急制动。线性底盘上还设计有紧急制动按钮,通过按下紧急制动按钮,制动指令通过CAN总线传输给线性底盘制动系统,进行一键制动。
本发明的优点在于:
1、本发明用于ADAS实验和自动驾驶测试的载人车辆实验平台,能够实现多功能的测试和实验,可以满足自动驾驶实验教学、工程实训、科学研究和功能演示,可以开展底盘AEB、ACC、LKA、自动驾驶循迹、激光雷达建图与定位、自动启停、交通标志识别、多目标识别、盲点检测实验等教学实验和课题研究。
2、本发明用于ADAS实验和自动驾驶测试的载人车辆实验平台,优化了软硬件一体化设计,预装Apollo和ROS操作系统,支持C语言、C++、Python等编程语言,满足ADAS实验教学自动驾驶研究试验的各项开发与测试需求,有助于使用者快速开展自动驾驶技术的研发,具备良好的兼容性与匹配性。
3、本发明用于ADAS实验和自动驾驶测试的载人车辆实验平台,具备保障实验安全的多重冗余安全设计,一是一旦发生危险后,使用者可以通过遥控器进行一键接管;二是车上安置紧急制动按钮,可以一键制动。三是车辆前后安装有防碰撞保险杠,发生碰撞后会自动制动。
附图说明
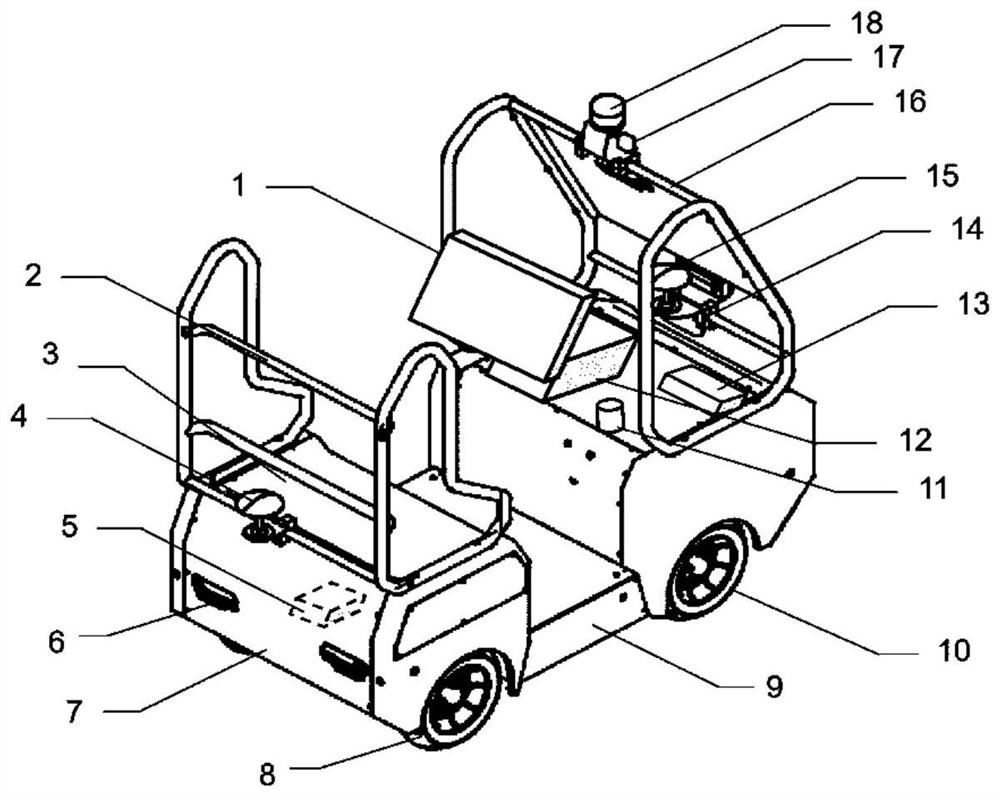
图1为本发明的提供的ADAS实验和自动驾驶测试的载人车辆实验平台结构示意图。
图中:
1-显示器 2-后部设备安装架 3-座椅
4-GNSS天线 5-IMU模块 6-尾灯
7-防碰撞保险杠 8-驱动轮 9-线控底盘
10-转向轮 11-紧急制动按钮 12-工控机
13-无线路由器 14-超声波雷达模块 15-毫米波雷达模块
16-前部设备安装架 17-相机模块 18-激光雷达模块
具体实施方式
下面将结合附图对本发明作进一步的详细说明。
本发明一种用于ADAS实验和自动驾驶测试的载人车辆实验平台,包括线控底盘9、工控机12、相机模块17、激光雷达模块18、超声波雷达模块14、毫米波雷达模块15、GNSS天线4、IMU模块5、显示器1、无线路由器13、遥控器、键盘和CAN总线。
所述线控底盘9的质量为320kg,长度1.7~1.8米,宽度0.9~1米,桁架结构,采用电机-驱动桥组合式驱动形式,后桥采用整体桥结构作为驱动桥。线控底盘9中的转向轮10为前轮,转向角为-30°~30°,且前轮采用乘用车上的双叉臂式悬架,操稳更精确,通过性高,减震性好,更容易进行自动驾驶算法向乘用车上移植。线控底盘9中的驱动轮8为后轮,由电机连接驱动桥传递动力,驱动桥悬架采用类拖曳臂式悬架,结构简单,安装方便,适配性强。
所述线控底盘9的转向控制由转向系统完成,转向系统采用220W的转向助力电机操控转向传动轴、万向节和方向机控制转向横拉杆的方式,能够提供足够的转向力,结构紧凑节省底盘空间,另外该转向电机具有堵转保护功能可以在极端转向时保护电机。驻车系统的驻车电机采用车规级的驻车电机,提升驻车效果,零部件可靠,固定架的位置能够灵活布置驻车系统的位置。制动系统采用电机加电动缸的形式,大功率绝对值伺服电机刹车力度大,伺服电机控制精确响应速度快。所述线控底盘9拥有不小于6kw·h的动力电池系统,同时可提供不少于3种直流和220v交流电源输出。
所述线控底盘9最高时速40km/h,爬坡速度5km/h,最大爬坡度30°。线控底盘9负载大于500kg,可载人2~4人,实验操作工程中至少乘坐两人,一人操控实验,另外一人观察车辆状态。线控底盘9后方安装有尾灯6,在制动操作时打开,用于警告后方行人或车辆。线控底盘9可通过CAN总线向工控机12发送反馈信号和接受控制信号,使用者可以通过遥控器或者工控机12发送控制命令控制线控底盘9,线控底盘9中的VCU也通过CAN总线向工控机12反馈出电机转速、电机扭矩和故障信息。
上述线控底盘9上安装有车体外壳;车体外壳采用中部内凹结构,前部顶面上安装有前部设备安装架16;前侧设备安装架前侧面为向后倾斜的斜面,且安装有透明挡风板,前侧设备安装架前侧面位于透明挡风板下部设计有用于挂载其他设备的下横梁。后部顶面上安装有后部设备安装架2;后部设备安装架2后侧面具有用于放置乘坐着后仰的保护横梁,同时在后侧面最下方设计有用于挂载其他设备的下横梁,且后部设备安装架2左右侧面前侧具有乘坐者手扶的纵杆车体外壳后部顶面为使用者座位,可安装车规级座椅,中部内凹部分作为使用者腿部放置位,进而使用者乘坐体验车辆实验平台,观察实验数据。座椅3可以与后部设备安装架2配合使用,保护乘坐人员。
所述12安装固定于线控底盘9前部顶面上,位于前部设备安装架16下方。工控机12采用支持GPU高端显卡的工业级车载工控机12,支持高速内存和存储,完全满足自动驾驶实验大数据量的计算功能和数据处理能力,还提供丰富的包括可扩展CAN总线的采集卡插槽,用于接收来自各类传感器的数据,实时计算处理,并向线控底盘9中执行机构发送指令。工控机12由动力电池系统提供24V直流供电。
所述GNSS天线4为两个,分别安装于线控底盘9的前、后两端,分别安装在前部设备安装架16和后部设备安装架2的下横梁上,用来进行GNSS差分定位,在无遮挡信号条件良好的情况下实现厘米级定位,GNSS天线4线束均与IMU模块5相连,需与IMU模块5数据融合进行配合使用。
所述IMU模块5安装于线控底盘9上,位于后轴中心正上方。IMU模块5共有两个GNSS天线4的接口,GNSS天线4的定位数据传输给IMU模块5进行数据融合使用实现更精准的定位。IMU模块5表面下方还有一个综合线束插口,分出多个接口分别与其他设备相连,包括:IMU模块5综合线束中的一个网线接口与无线路由器13相连,通过无线路由器13接收附近基站传来的GNSS差分定位信息,减少误差;IMU模块5综合线束分出的另一个USB接口与工控机12连接,为工控机12传输融合GNSS天线4和IMU模块5数据后的定位信息;IMU模块5综合线束还具有激光雷达的授时分线束,主要是对激光雷达模块18进行授时,对IMU模块5与激光雷达模块18的时间进行同步。
所述激光雷达模块18安装于前部设备安装架16的顶部横梁上。激光雷达模块18选用16线激光线束数的激光雷达,实时采集并发送100米以内点云数据,可以在Apollo系统和ROS系统中构建实时地图或录制三维数据。激光雷达模块18与分线盒连接。分线盒的数据传输线通过以太网接口RJ45接口与工控机12相连,将激光雷达模块18采集的数据处理后发送给工控机12。激光雷达模块18通过分线盒由动力电池系统提供12V直流供电。
所述毫米波雷达模块15安装于车辆前部,位于前部设备15安装架前方,通过发射一定频率的毫米波信号实时采集得到底盘前部与前方车辆等物体的距离,还能获取相对速度和两个对象的角度关系。检测到的数据信息发送到工控机12中进行处理。基于毫米波雷达模块可以开展ADAS和自动驾驶的自适应巡航、盲点监测、碰撞预警的实验。
所述超声波雷达模块14安装固定于前上部设备安装架15的下横梁中间位置。超声波雷达模块14通过发射并接收超声波信号的时间差计算出超声波雷达模块与前方障碍物之间距离,根据前方障碍物距离信息进行避障算法处理等,实时检测自动驾驶车辆前方障碍物距离,可开展基于毫米波雷达模块15的避障实验等。超声波雷达模块14亦可根据使用者实验和测试需要补充设置多组,可沿防碰撞保险杠7均匀布置。
所述相机模块17安装于前部设备安装架16的顶部横梁上,位于激光雷达模块18下方,分辨率不小于1920*1080,前瞻角能够保证覆盖前方道路。相机模块17的采集的数字图像输入到工控机12中做进一步处理。相机模块17可以用于开展车道线检测、车道线保持、交通标志识别、多目标分类的算法开发和教学实验。
所述显示器1安装于线控底盘9前部设备安装架上,可伸缩、折叠和旋转,屏幕根据乘客需要调整方向,后部设备安装架亦可增设显示器用于演示。。显示器1用于显示车辆状态和传感器数据处理结果,包括对激光点云的数据进行可视化、车道线识别结果、多目标的识别和分类、自动驾驶循迹等可视化操作界面。显示器1由动力电池系统通过逆变器提供220V交流电,亦可根据使用者需要更换为满足直流电的液晶屏。
上述工控机12由键盘输入实验数据或者控制指令。键盘采用为无线键盘,通过无线USB模块与工控机12相连。在底盘控制实验中,使用者通过键盘设置线控底盘9数据和发送油门、制动和转向指令,也可以过键盘输入其他实验程序代码,操作ADAS实验和自动驾驶测试的载人车辆实验平台的系统运行。
所述无线路由器13安装于线控底盘9前部顶面上,内有工业物联网不低于4G数据标准的SIM卡,可以接收移动互联网的数据,无线路由器13有一个网线接口与工控机12相连,为工控机12提供可移动的网络数据。无线路由器13由动力电池系统通过提供12V直流电。
所述CAN总线主要用于传输车辆实时数据包括速度、转向等参数。CAN总线通过CAN卡驱动与工控机12相连,传输指令给线控底盘9的VCU,VCU控制执行机构,并反馈来自线控底盘9的速度和转角。
所述工控机12分别通过接收来自IMU模块5的定位数据、激光雷达模块18采集的激光点云数据、相机模块17的图像数据、毫米波雷达模块15的前方障碍物距离数据、超声波雷达模块14采集超声波反射的距离数据、无线路由器13的网络数据、工控机12的输出指令以及车辆反馈的转向数据和加减速数据。同时,工控机12输出指令控制车辆的驻车系统、转向系统、制动系统和电机。工控机12输出各个传感器的可视化图形界面,通过显示器1为使用者提供实验结果。工控机12中预装Linux操作系统环境,配套Apollo和ROS软件平台,支持C语言、C++、Python等编程语言。
所述防碰撞保险杠7分别布置于底盘前部和后部端面,内有压力传感器,在车辆发生碰撞之后通过CAN总线传输信号给线控底盘9,线控底盘9会紧急制动。同时,在前部设备安装架16上安装有紧急制动按钮11。乘坐人员在预感到危险情况下,可以迅速按下紧急制动按钮11,制动指令通过CAN总线传输给线控底盘9制动系统,进行一键制动。
除上述设备外本发明中还具有遥控器;遥控器在实验过程中拥有ADAS实验和自动驾驶测试的载人车辆实验平台控制的最高权限,在紧急情况下实现对线控底盘9的一键接管。遥控器19数据直接通过无线信号与车辆数据CAN总线上的信号接收器通信,可以通过CAN总线发送指令给VCU控制车辆的油门系统和制动系统进行加减速和刹车,控制转向系统操控线控底盘9转向。
通过本发明提供的一种ADAS实验和自动驾驶测试的载人车辆实验平台,可以开展可以开展底盘AEB、ACC、LKA、自动驾驶循迹、激光雷达建图与定位、自动启停、交通标志识别、多目标识别、盲点检测实验等教学实验,用于进行自动驾驶感知算法的试验测试和控制决策算法的研究验证。
- 一种用于ADAS实验和自动驾驶测试的载人车辆实验平台
- 一种用于ADAS实验和自动驾驶测试的载人车辆实验平台